Свойства электропривода при настройке контура регулирования скорости на технический оптимум
Последовательная коррекция контура регулирования скорости позволяет создавать унифицированные регулируемые электроприводы с определенными стандартными показателями. Так как обычно наряду с необходимостью регулирования скорости требуется регулирование и момента (тока) двигателя, рассмотрим физические свойства системы УП—Д, в которой при регулировании скорости работает подчиненный контур регулирования момента оптимизированный методом последовательной коррекции. С учетом передаточной функции замкнутого контура регулирования момента (7.40) структурная схема контура регулирования скорости в обобщенной системе УП— Д представлена на рис. 8.13,а. В соответствии с ней объект регулирования скорости состоит из замкнутого контура регулирования момента и механического звена электропривода и имеет следующую передаточную функцию:
Следуя рекомендациям, пренебрежем в передаточной функции членом, содержащим р2:
Соотношение (8.37) показывает, что для контура скорости не- компенсируемая постоянная времени раз больше, чем для подчиненного контура регулирования момента.
Желаемая передаточная функция для контура регулирования скорости
где — соотношение постоянных контура скорости. Передаточная функция регулятора скорости
Необходим П-регулятор скорости с коэффициентом крс. Так как выходное напряжение регулятора скорости является сигналом задания момента для подчиненного контура, необходимо ограничить максимальное значение исходя из требуемого стопорного момента:
Характеристика регулятора скорости, отвечающая этому условию, представлена на рис. 8.13,б.
Передаточная функция замкнутого контура регулирования скорости
Выбором соотношения постоянных времени контура в пределах можно получить требуемое по техническим условиям демпфирование колебаний скорости в переходных процессах и ограничить перерегулирование допустимым значением. Наиболее широко на практике используется стандартная настройка на технический оптимум , при этом
Рассмотрим, какими свойствами обладает электропривод при такой настройке контура регулирования скорости. Благодаря малости некомпенсируемой постоянной времени подчиненный контур регулирования момента обеспечивает в области малых и средних частот высокую точность регулирования момента, при которой допустимо пренебречь влиянием электромеханической связи и получить уравнение механической характеристики с помощью структурной схемы на рис. 8.13,а при :
С помощью (8.39) уравнение (8.43) можно представить в виде
Уравнение статической механической характеристики (р = 0)
Это уравнение справедливо в пределах линейной части характеристики регулятора скорости, т. е. при При снижении скорости до значения выходное напряжение регулятора скорости достигает максимального значения и при . Механические характеристики электропривода при настройке контура регулирования скорости и подчиненного контура регулирования момента на модульный оптимум показаны для различных Тм на рис. 8.13,в.
В соответствии с (8.44) модуль жесткости механической характеристики в замкнутой по скорости системе определяется соотношением динамических параметров — постоянных времени и Это объясняется выбором коэффициента обратной связи по скорости из условия получения определенных динамических показателей, соответствующих техническому оптимуму. Как следствие, точность регулирования при различных параметрах механической части оказывается существенно различной.
Если электропривод обладает большой механической инерцией и его электромеханическая постоянная модуль жесткости механической характеристики в замкнутой системе выше, чем в разомкнутой . При модуль жесткости в замкнутой системе остается тем же, что и в разомкнутой системе Для мощных приводов с малым приведенным моментом инерции жесткость механической характеристики в замкнутой системе получается меньшей, чем в разомкнутой системе
Структурная схема электропривода, соответствующая (8.44), представлена на рис. 8.14,а. Определим с ее помощью передаточную функцию динамической жесткости механической характеристики в замкнутой системе:
Соответствующие (8.46) ЛАЧХ при различных отношениях приведены на рис. 8.14,6. Там же для сравнения приведена ЛАЧХ динамической жесткости характеристики разомкнутой системы (штриховая прямая 1). Сравнивая их, можно заключить, что при область частот, в которой расхождения между статикой и динамикой невелики, расширяется и точность регулирования также зависит от отношения , как и в статике.
В соответствии с (8.38) и схемой на рис. 8.14,о изображение ошибки регулирования по управляющему воздействию при имеет вид
Положив в (8.47) р = 0, можно убедиться, что при = const статическая ошибка по управляющему воздействию отсутствует, электропривод по управлению обладает астатизмом первого порядка.
Если управляющее воздействие нарастает по линейному закону
то в установившемся режиме будет иметь место постоянная ошибка, определяемая (8.47) при подстановке в эту формулу (8.48) и р=0
Определим с помощью рис. 8.14,а и формулы (6.19) изображение ошибки по возмущению, обусловленному статической на грузкой электропривода Мс(р):
При (8.50) определяет статическую ошибку по нагрузке
которая определяется модулем жесткости механических характеристик в замкнутой системе электропривода (см. рис. 8.13,в).
В переходных процессах, обусловленных изменениями задания по линейному закону (8.43), установившаяся динамическая Ошибка (8.49) суммируется со статической (8.51):
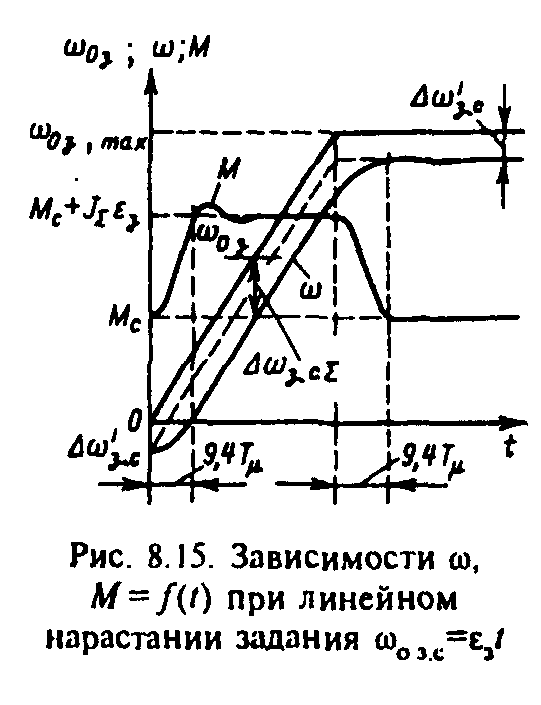
С учетом известного характера изменения переменных в переходных процессах при настройке на технический оптимум (8.48) и (8.52) позволяют установить вид зависимостей при линейном нарастании задающего сигнала и (рис. 8.15). Так как перерегулирование и колебательность при пренебрежимо малы, максимум переходной ошибки на рис. 8.15 незначительно отличается от установившейся динамической ошибки
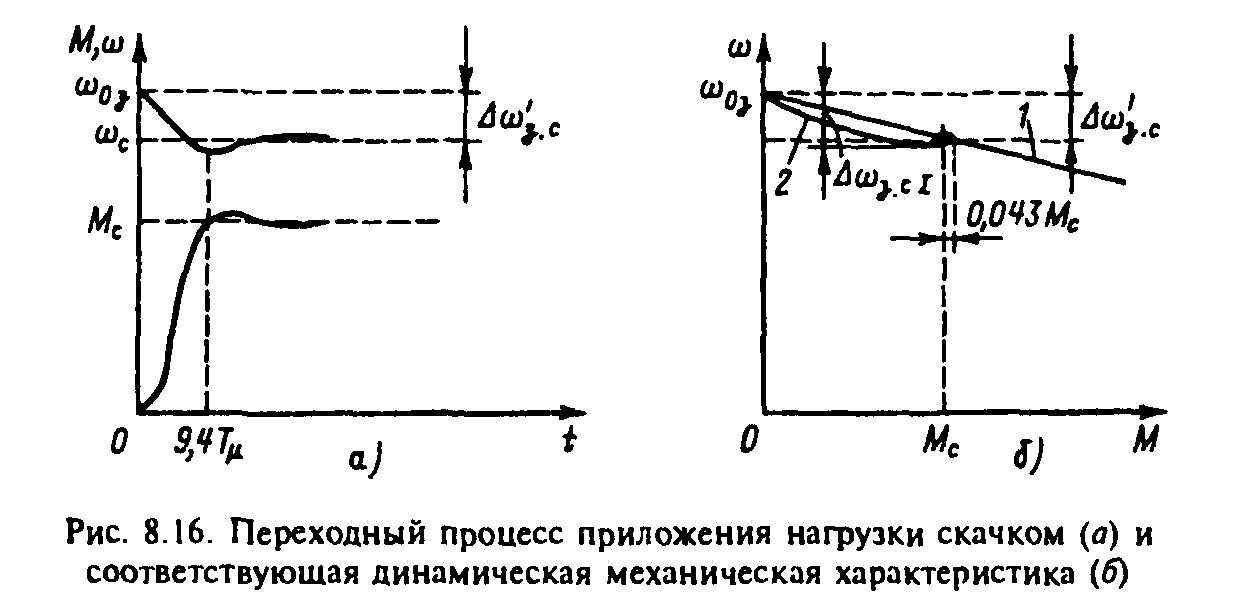
Для многих электроприводов по технологическим условиям необходимо иметь минимальные динамические падения скорости в переходных процессах ударного приложения нагрузки. Примерный вид характеристики при настройке контура скорости на технический оптимум при приложении скачком момента показан на рис. 8.16,а. По этим характеристикам на рис. 8.16,б построена характеристика 2, которая значительно отличается от статической характеристики в начале процесса и быстро приближается к ней в конце. В связи с малым перерегулированием, свойственным настройке на технический оптимум, максимум динамической ошибки определяется в своей основной части статической ошибкой определяемой жесткостью статической характеристики.
Если важно минимизировать динамическое падение скорости и допустимо увеличить колебательность электропривода, на практике отступают от настройки на технический оптимум и выбирают при при этом (8.51) можно представить так:
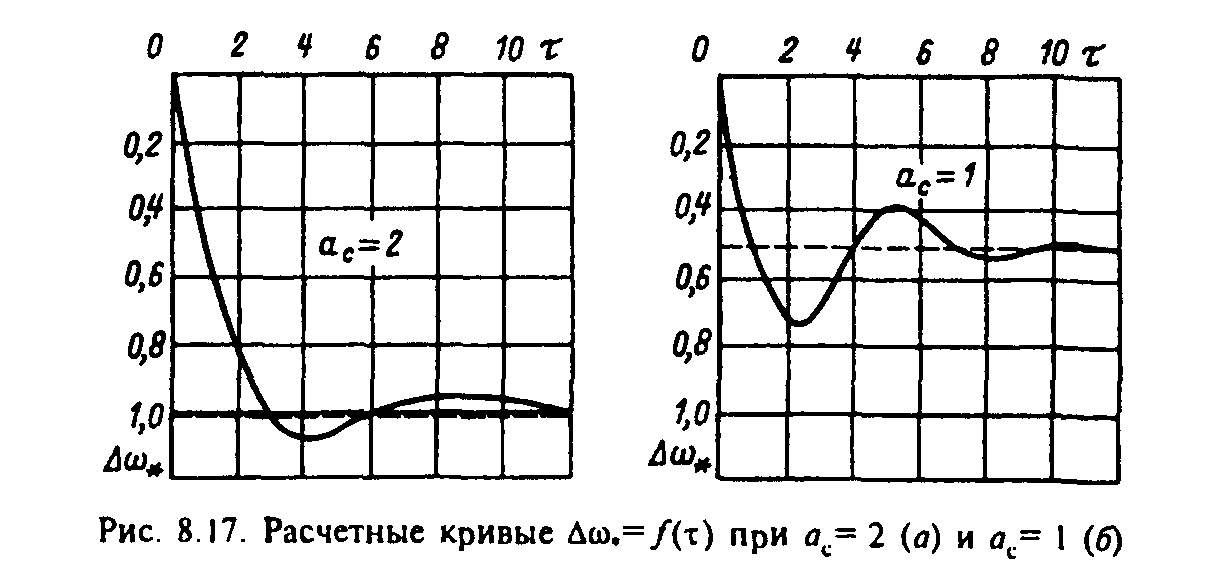
В соответствии с (8.53) при ас< 2 возрастает модуль жесткости статической механической характеристики и уменьшается статическая ошибка Увеличение статической точности регулирования может в определенных пределах быть более существенным, чем возрастание динамических ошибок в связи с повышением колебательности электропривода. В этом можно убедиться, рассматривая рис. 8.17, на котором построены для ам= 2 зависимости (рис. 8.17,о) и ac= 1 (рис. 8.17,6), причем
В качестве базового значения ошибки принята статическая ошибка
Свойства электропривода при настройке контура регулирования скорости на симметричный оптимум
Стандартная настройка контура регулирования скорости на технический оптимум широко используется на практике в связи с простотой технической реализации и благоприятным для большинства электроприводов характером протекания переходных процессов. Однако, как было установлено, точность регулирования при малом моменте инерции электропривода может быть ниже, чем в разомкнутой системе электропривода, и не удовлетворять предъявляемым требуют шиям. В этих случаях в многоконтурных унифицированных структурах регулирования координат электропривода прибегают к увеличению порядка астатизма системы по отношению к воздействию нагрузки.
Одним из возможных путей увеличения точности регулирования скорости при изменениях нагрузки является дополнение двухконтурной системы регулирования скорости, настроенной на технический оптимум, вторым контуром регулирования скорости, настроенным так же, как и первый.
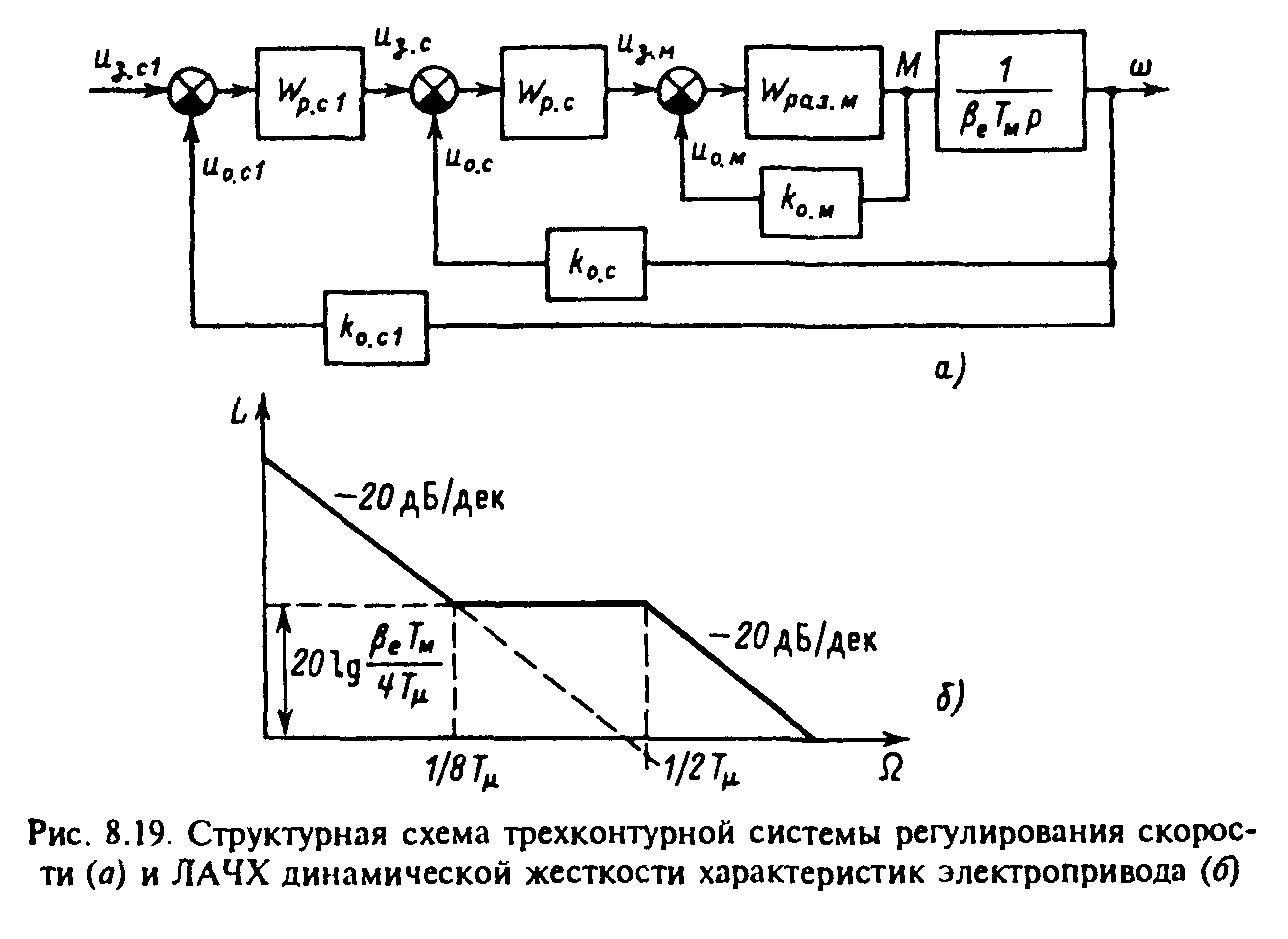
Структурная схема трехконтурной системы с двумя контурами регулирования скорости и подчиненным контуром
регулирования момента приведена на рис. 8.19,а. Для внешнего контура регулирования скорости объектом регулирования является замкнутый внутренний контур, передаточная функция которого имеет вид
В результате последовательной коррекции необходимо получить следующую передаточную функцию разомкнутого внешнего контура регулирования скорости:
Следовательно, регулятор скорости внешнего контура регулирования должен иметь передаточную функцию интегрирующего звена
Передаточная функция замкнутой трехконтурной системы при настройке на технический оптимум
С помощью структурной схемы на рис. 8.19,а, приняв с учетом (8.39) и (8.56) получим выражение динамической жесткости механической характеристики
Асимптотическая ЛАЧХ динамической жесткости, соответствующая (8.58), для настройки на технический оптимум ас1= а = ам= 2 представлена на рис. 8.19,б. Сопоставление этой характеристики с аналогичной характеристикой двухконтурной системы (см. рис. 8.14) свидетельствует о том, что введение дополнительного контура регулирования скорости обеспечивает астатическое регулирование скорости в области низких частот. В области среднечастотной асимптоты модуль динамической жесткости остается таким же, как и в двухконтурной системе, что дает основание предполагать, что при быстрых изменениях нафузки точность регулирования в астатической системе незначительно отличается от динамической точности более простой двухконтурной системы.
Ошибку регулирования по управляющему воздействию определим с помощью передаточной функции разомкнутого контура (8.55):
Трехконтурная система, как и двухконтурная, обладает аста- тизмом первого порядка по управляющему воздействию, причем динамическая ошибка при линейном нарастании задающего сигнала составит
т. е. при добавлении третьего контура увеличивается в 2 раза по сравнению с (8.49). Так наглядно подтверждается отмеченная выше особенность многоконтурных систем подчиненного регулирования — при настройке на технический оптимум некомпен- сируемая постоянная возрастает в раз с возрастанием номера контура Соответственно возрастает и динамическая ошибка регулирования.
При настройке на технический оптимум
Для определения ошибки регулирования по возмущающему воздействию структурную схему на рис. 8.19,а необходимо преобразовать. Сначала объединим две обратные связи по скорости в одну и используем упрощенную передаточную функцию замкнутого контура момента (рис. 8.20,а). Затем перейдем к единичной обратной связи по скорости (рис 8.20,6) и получим удобную для поставленной цели структурную схему (рис. 8.20,в). В соответствии с этой схемой и с учетом (8.58) можно записать
Как уже было отмечено, трехконтурная система обеспечивает астатическое регулирование и по нагрузке. Установившаяся ошибка при линейном нарастании нагрузки во времени ограничена значением
Таким образом, точность регулирования скорости в статических режимах в трехконтурной системе по сигналу задания сохраняется на том же уровне, что и в двухконтурной системе, а по нагрузке существенно возрастает, так как обеспечивается астатическое регулирование. В установившихся режимах линейного изменения задания ошибка регулирования больше в трехконтурной системе. Поскольку среднечастотная асимптота ЛАЧХ динамической жесткости в обеих системах одинакова, динамическая точность этих систем примерно одинакова. Характер переходных процессов при изменениях задающего сигнала соответствует настройке на технический оптимум, но быстродействие получается примерно в 2 раза ниже, чем в простейшей двухконтурной системе.
обеспечить астатизм по нагрузке при регулировании скорости можно без применения второго контура регулирования скорости путем настройки двухконтурной системы на симметричный оптимум. Для реализации этого пути при последовательной коррекции контура регулирования скорости задаются желаемой передаточной функцией разомкнутого контура в виде (6.54), причем в связи с наличием подчиненного контура регулирования момента принимают
Передаточная функция объекта регулирования при отбрасывании члена второго порядка в передаточной функции замкнутого контура момента имеет вид
Передаточная функция регулятора скорости
Получены передаточная функция ПИ-регулятора скорости и соотношения для расчета его параметров:
Передаточная функция замкнутого контура регулирования скорости по управлению
Для анализа реакции синтезированной системы на изменения нагрузки преобразуем полученную в результате коррекции структурную схему (рис. 8.21,а) к виду, представленному на рис. 8.21,6. Рассматривая последнюю структуру, можем записать передаточную функцию динамической жесткости механической характеристики замкнутой системы:
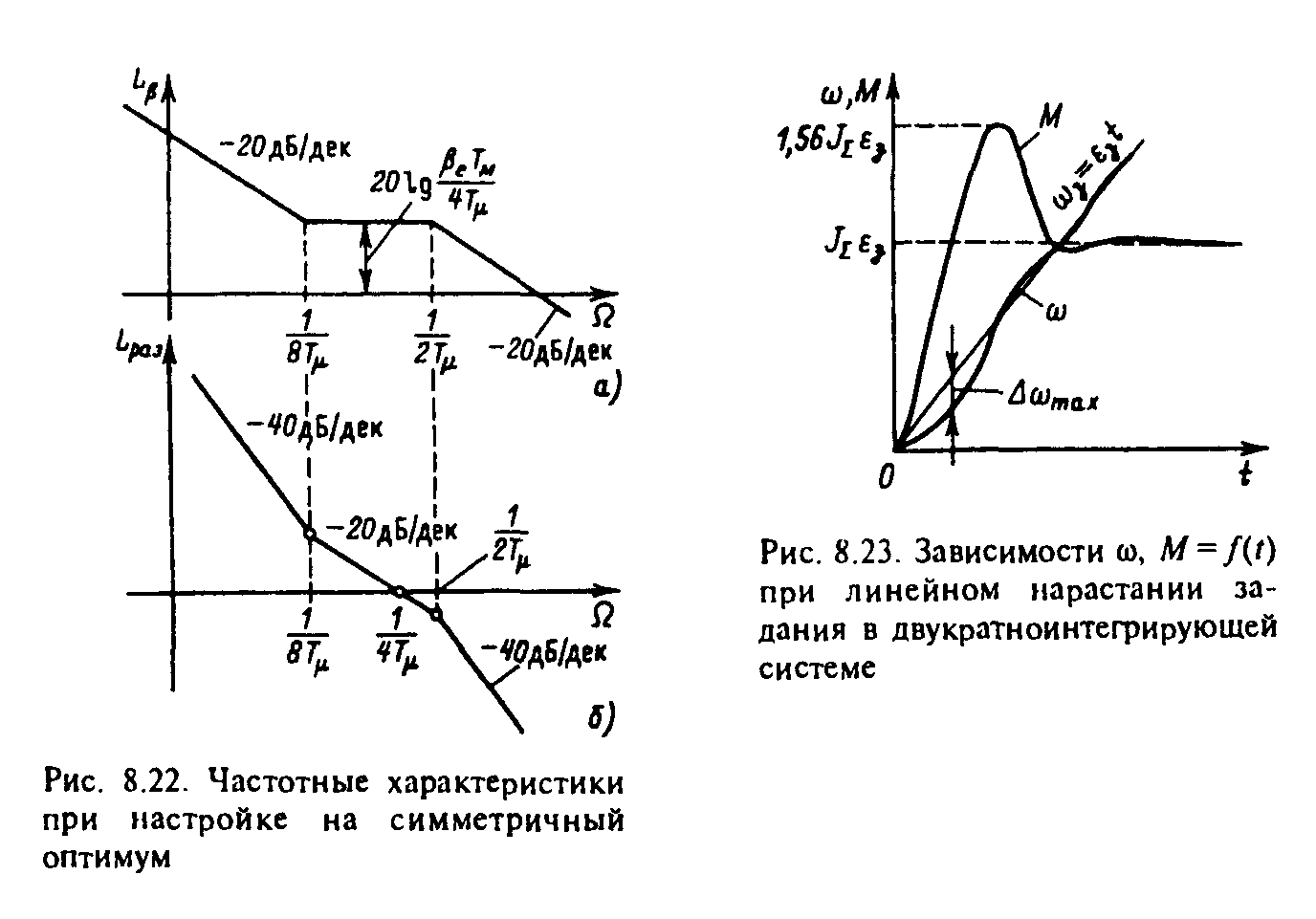
Частотная характеристика динамической жесткости представлена на рис. 8.22,а. Если сравнить рис. 8.22,а с рис. 8.19,6,можно убедиться в их полном совпадении, что свидетельствует об одинаковой точности регулирования скорости при изменениях нафузки как в трехконтурной, так и в двухконтурной астатических системах.
Однако точность при отработке сигнала задания выше в двухконтурной системе, настроенной на симметричный оптимум. В соответствии с (8.62) и ЛАЧХ разомкнутого контура, показанной на рис. 8.22,6, двухконтурная система с ПИ-регулятором скорости обладает астатизмом второго порядка. Изображение ошибки регулирования при изменениях управляющего воздействия в такой системе определяется с помощью (8.62):
Уравнение (8.65) показывает, что благодаря астатизму второго порядка установившаяся динамическая ошибка в режимах линейного нарастания задания отсутствует. По этой причине двухконтурную систему с ПИ-регулятором скорости называют двукратноинтефирующей системой и применяют в тех случаях, когда важно иметь высокую точность отработки изменений сигналов задания.
Наличие в ЛАЧХ разомкнутого контура (рис. 8.22,6) низкочастотной асимптоты с наклоном -40 дБ/дек приводит к снижению запаса по фазе на частоте среза по сравнению с настройкой на технический оптимум, что определяет значительно большие перерегулирования по скорости при офаботке скачка задания, чем в фехконтурной системе.
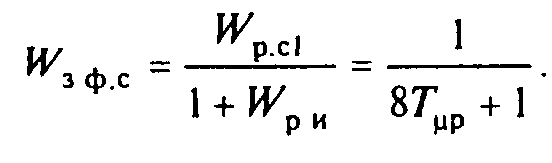
Установившаяся ошибка при насфойке на симмефичный оптимум в режимах линейного нарастания задания как отмечено, равна нулю. Однако в начале процесса в связи с элеетромагнитной инерцией (8.65) определяет отставание изменения скорости от заданных значений (рис. 8.23). Возникшая на этом этапе ошибка отрабатывается в течение времени с перерегулированием по моменту' М и ускорению , достигающим 56% установившихся значений
Поэтому в случаях, когда важно повысить жесткость механической характеристики и увеличить статическую точность регулирования при изменениях нагрузки, либо применяют рассмотренную выше трехконтурную структуру, либо корректируют реакцию двухконтурной системы на изменения управляющего воздействия путем введения на вход системы дополнительного звена. В частности, таким путем можно, не изменяя точности по нагрузке, получить настройку системы с ПИ-регулятором скорости по управлению, соответствующую техническому оптимуму. Сравнивая рис. 8.20,в для трехконтурной системы с рис. 8.21,в для системы с ПИ-регулятором скорости, можно убедиться, что для достижения этой цели необходимо на задающий вход регулятора включить фильтр с передаточной функцией
К тому же выводу можно прийти и путем сравнения передаточной функции замкнутой трехконтурной системы (8.57) с такой же передаточной функцией для настройки на симметричный оптимум в двухконтурной системе. При введении такого звена установившаяся ошибка при линейном нарастании задания уже получается не равной нулю, а определяется (8.60). Характер переходных процессов в системе при этом соответствует настройке на технический оптимум.



 членом, содержащим р2:
членом, содержащим р2:
 раз больше, чем для подчиненного контура регулирования момента.
раз больше, чем для подчиненного контура регулирования момента.
 — соотношение постоянных контура скорости. Передаточная функция регулятора скорости
— соотношение постоянных контура скорости. Передаточная функция регулятора скорости для подчиненного контура, необходимо ограничить максимальное значение
для подчиненного контура, необходимо ограничить максимальное значение  исходя из требуемого стопорного момента:
исходя из требуемого стопорного момента:
 регулятора скорости, отвечающая этому условию, представлена на рис. 8.13,б.
регулятора скорости, отвечающая этому условию, представлена на рис. 8.13,б.
 можно получить требуемое по техническим условиям демпфирование колебаний скорости в переходных процессах и ограничить перерегулирование допустимым значением. Наиболее широко на практике используется стандартная настройка на технический оптимум
можно получить требуемое по техническим условиям демпфирование колебаний скорости в переходных процессах и ограничить перерегулирование допустимым значением. Наиболее широко на практике используется стандартная настройка на технический оптимум  , при этом
, при этом
 подчиненный контур регулирования момента обеспечивает в области малых и средних частот высокую точность регулирования момента, при которой допустимо пренебречь влиянием электромеханической связи и получить уравнение механической характеристики с помощью структурной схемы на рис. 8.13,а при
подчиненный контур регулирования момента обеспечивает в области малых и средних частот высокую точность регулирования момента, при которой допустимо пренебречь влиянием электромеханической связи и получить уравнение механической характеристики с помощью структурной схемы на рис. 8.13,а при  :
:


 При снижении скорости до значения
При снижении скорости до значения  выходное напряжение регулятора скорости достигает максимального значения и при
выходное напряжение регулятора скорости достигает максимального значения и при  . Механические характеристики электропривода при настройке контура регулирования скорости и подчиненного контура регулирования момента на модульный оптимум показаны для различных Тм на рис. 8.13,в.
. Механические характеристики электропривода при настройке контура регулирования скорости и подчиненного контура регулирования момента на модульный оптимум показаны для различных Тм на рис. 8.13,в. и
и  Это объясняется выбором коэффициента обратной связи по скорости из условия получения определенных динамических показателей, соответствующих техническому оптимуму. Как следствие, точность регулирования при различных параметрах механической части оказывается существенно различной.
Это объясняется выбором коэффициента обратной связи по скорости из условия получения определенных динамических показателей, соответствующих техническому оптимуму. Как следствие, точность регулирования при различных параметрах механической части оказывается существенно различной. модуль жесткости механической характеристики в замкнутой системе
модуль жесткости механической характеристики в замкнутой системе  выше, чем в разомкнутой
выше, чем в разомкнутой  . При
. При  модуль жесткости в замкнутой системе остается тем же, что и в разомкнутой системе
модуль жесткости в замкнутой системе остается тем же, что и в разомкнутой системе 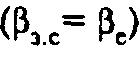 Для мощных приводов с малым приведенным моментом инерции
Для мощных приводов с малым приведенным моментом инерции  жесткость механической характеристики в замкнутой системе получается меньшей, чем в разомкнутой системе
жесткость механической характеристики в замкнутой системе получается меньшей, чем в разомкнутой системе 

 приведены на рис. 8.14,6. Там же для сравнения приведена ЛАЧХ динамической жесткости характеристики разомкнутой системы (штриховая прямая 1). Сравнивая их, можно заключить, что при
приведены на рис. 8.14,6. Там же для сравнения приведена ЛАЧХ динамической жесткости характеристики разомкнутой системы (штриховая прямая 1). Сравнивая их, можно заключить, что при  область частот, в которой расхождения между статикой и динамикой невелики, расширяется и точность регулирования также зависит от отношения
область частот, в которой расхождения между статикой и динамикой невелики, расширяется и точность регулирования также зависит от отношения  , как и в статике.
, как и в статике. имеет вид
имеет вид
 = const статическая ошибка по управляющему воздействию отсутствует, электропривод по управлению обладает астатизмом первого порядка.
= const статическая ошибка по управляющему воздействию отсутствует, электропривод по управлению обладает астатизмом первого порядка.


 (8.50) определяет статическую ошибку по нагрузке
(8.50) определяет статическую ошибку по нагрузке

 при линейном нарастании задающего сигнала и
при линейном нарастании задающего сигнала и  (рис. 8.15). Так как перерегулирование и колебательность при
(рис. 8.15). Так как перерегулирование и колебательность при  пренебрежимо малы, максимум переходной ошибки на рис. 8.15 незначительно отличается от установившейся динамической ошибки
пренебрежимо малы, максимум переходной ошибки на рис. 8.15 незначительно отличается от установившейся динамической ошибки 
 в переходных процессах ударного приложения нагрузки. Примерный вид характеристики
в переходных процессах ударного приложения нагрузки. Примерный вид характеристики  при настройке контура скорости на технический оптимум при приложении скачком момента
при настройке контура скорости на технический оптимум при приложении скачком момента  показан на рис. 8.16,а. По этим характеристикам на рис. 8.16,б построена характеристика 2, которая значительно отличается от статической характеристики
показан на рис. 8.16,а. По этим характеристикам на рис. 8.16,б построена характеристика 2, которая значительно отличается от статической характеристики  в начале процесса и быстро приближается к ней в конце. В связи с малым перерегулированием, свойственным настройке на технический оптимум, максимум динамической ошибки
в начале процесса и быстро приближается к ней в конце. В связи с малым перерегулированием, свойственным настройке на технический оптимум, максимум динамической ошибки  определяется в своей основной части статической ошибкой
определяется в своей основной части статической ошибкой  определяемой жесткостью статической характеристики.
определяемой жесткостью статической характеристики. при этом (8.51) можно представить так:
при этом (8.51) можно представить так:
 и уменьшается статическая ошибка
и уменьшается статическая ошибка  Увеличение статической точности регулирования может в определенных пределах быть более существенным, чем возрастание динамических ошибок в связи с повышением колебательности электропривода. В этом можно убедиться, рассматривая рис. 8.17, на котором построены для ам= 2 зависимости
Увеличение статической точности регулирования может в определенных пределах быть более существенным, чем возрастание динамических ошибок в связи с повышением колебательности электропривода. В этом можно убедиться, рассматривая рис. 8.17, на котором построены для ам= 2 зависимости  (рис. 8.17,о) и ac= 1 (рис. 8.17,6), причем
(рис. 8.17,о) и ac= 1 (рис. 8.17,6), причем





 с учетом (8.39) и (8.56) получим выражение динамической жесткости механической характеристики
с учетом (8.39) и (8.56) получим выражение динамической жесткости механической характеристики

 составит
составит
 раз с возрастанием номера контура
раз с возрастанием номера контура  Соответственно возрастает и динамическая ошибка регулирования.
Соответственно возрастает и динамическая ошибка регулирования.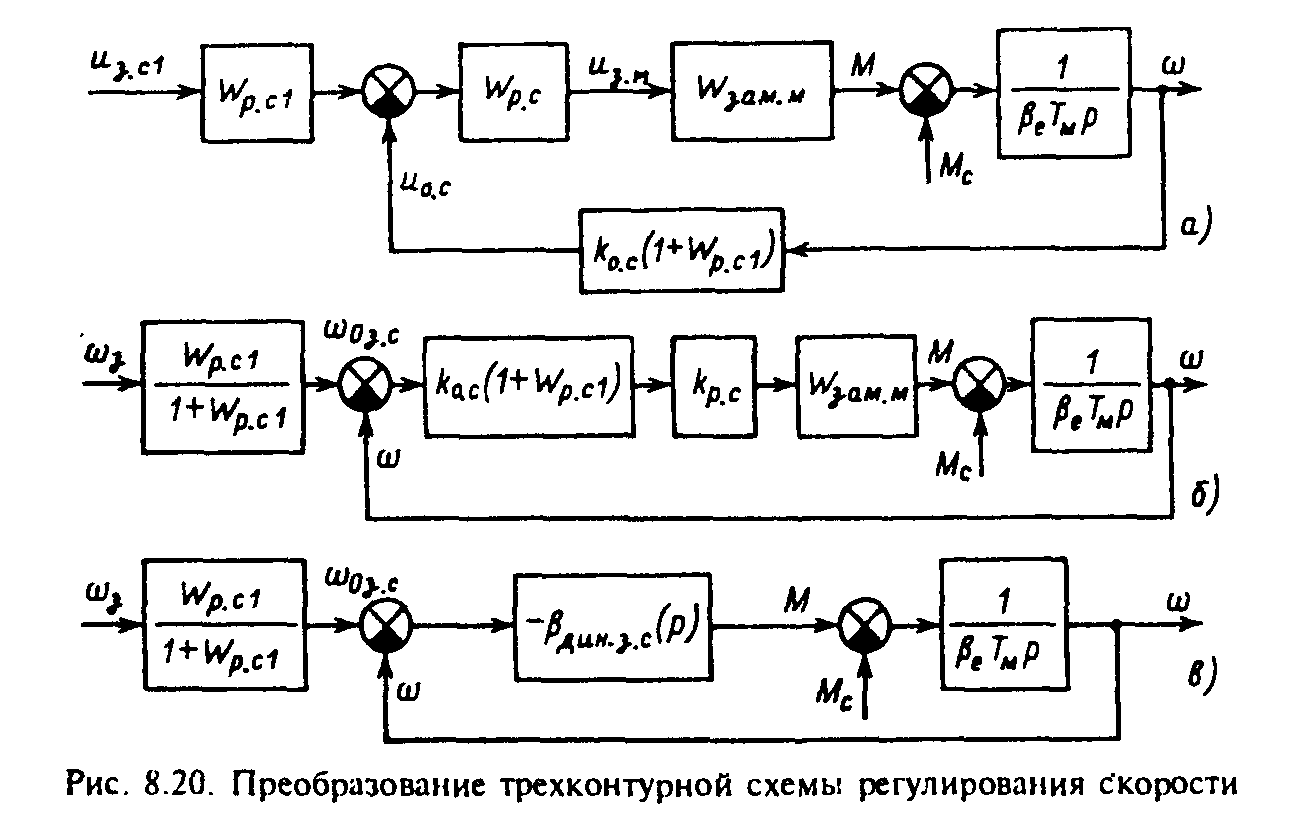







 отсутствует. По этой причине двухконтурную систему с ПИ-регулятором скорости называют двукратноинтефирующей системой и применяют в тех случаях, когда важно иметь высокую точность отработки изменений сигналов задания.
отсутствует. По этой причине двухконтурную систему с ПИ-регулятором скорости называют двукратноинтефирующей системой и применяют в тех случаях, когда важно иметь высокую точность отработки изменений сигналов задания.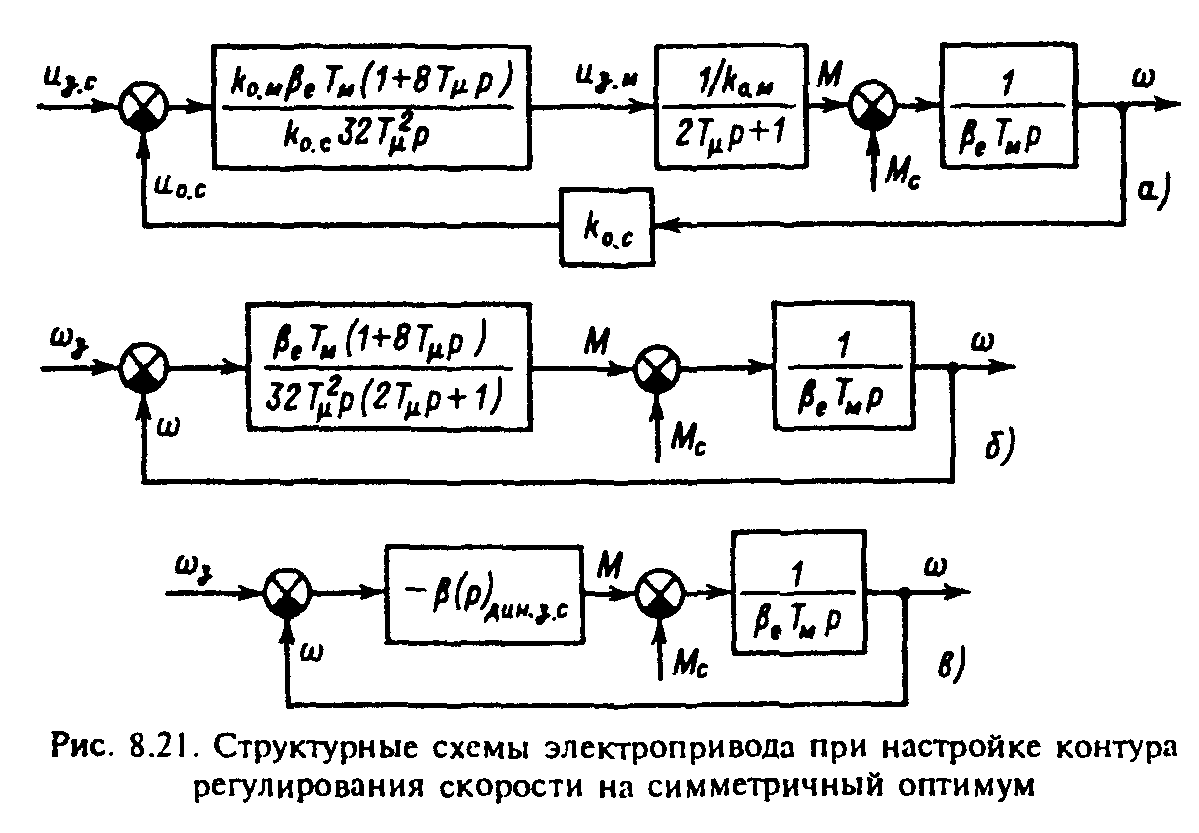
 по сравнению с настройкой на технический оптимум, что определяет значительно большие перерегулирования по скорости при офаботке скачка задания, чем в фехконтурной системе.
по сравнению с настройкой на технический оптимум, что определяет значительно большие перерегулирования по скорости при офаботке скачка задания, чем в фехконтурной системе. как отмечено, равна нулю. Однако в начале процесса в связи с элеетромагнитной инерцией (8.65) определяет отставание изменения скорости от заданных значений
как отмечено, равна нулю. Однако в начале процесса в связи с элеетромагнитной инерцией (8.65) определяет отставание изменения скорости от заданных значений  (рис. 8.23). Возникшая на этом этапе ошибка отрабатывается в течение времени
(рис. 8.23). Возникшая на этом этапе ошибка отрабатывается в течение времени  с перерегулированием по моменту' М и ускорению
с перерегулированием по моменту' М и ускорению  , достигающим 56% установившихся значений
, достигающим 56% установившихся значений