В какой из систем с двумя контурами регулирования скорости или двухкратноинтегрирующей с ПИ регулятором выше быстродействие и меньше перерегулирование.
Система управления электропривода со держит два контура регулирования : внутренний контур тока якоря и внешний контур скорости . Внутренняя связь по ЭДС двигателя присохранении стандартных настроек регуляторов несколько повышает демпфирование и снижает перерегулирование в режимах обработки сброса– наброса момента нагрузки. ЭДС
оказывает влияние и на работу контуров тока и скорости при отработке входных воздействий, снижая динамический ток при скачке задания и повышая ошибку отработки скорости при ее линейном задании. Однако существенное влияние ЭДС проявляется только при неблагоприятном соотношении параметров (пониженные значения ТМ и ТЭ, повышенное значение Тμ). Простота П– и ПИ–регуляторов и их оптимальных настроек обусловила преимущественное применение данных регуляторов в системах управления с подчиненным регулированием координат электропривода.
Чем больше контуров в системе подчиненного регулирования, тем меньше быстродействие внешнего контура.
Двухконтурную систему с ПИ-регулятором скорости называют двукратноинтегрирующей системой и применяют в тех случаях, когда важно иметь высокую точность отработки изменений сигналов задания.
3.5 Регулирование скорости АД изменением числа пар полюсов и в системе ТРН-АД.
Общие свойства регулируемого по скорости электропривода рассмотренные ранее на основе обобщенной структуры электропривода с линеаризованной механической характеристикой, не* обходимо дополнить рассмотрением ряда частных возможностей регулирования скорости асинхронного электропривода, связанных с его особенностями. Возможные способы регулирования скорости асинхронного электропривода можно разделить на три группы: 1) способы регулирования, при которых скольжение изменяется в широких пределах и потери, выделяющиеся в виде теплоты в элементах роторной цепи, пропорциональны скольжению; 2) способы, при которых абсолютное скольжение двигателя при регулировании остается небольшим и не достигает критического скольжения на естественной характеристике ; 3) способы, при которых абсолютное скольжение при регулировании изменяется в широких пределах, но потери энергии скольжения в роторной цепи двигателя ограничены.
К первой группе способов регулирования скорости асинхронного электропривода относятся рассмотренное ранее реостатное регулирование, регулирование изменением напряжения на статоре двигателя, наложение механических характеристик в двухдвигательном электроприводе, регулирование с помощью асинхронной муфты скольжения и др.
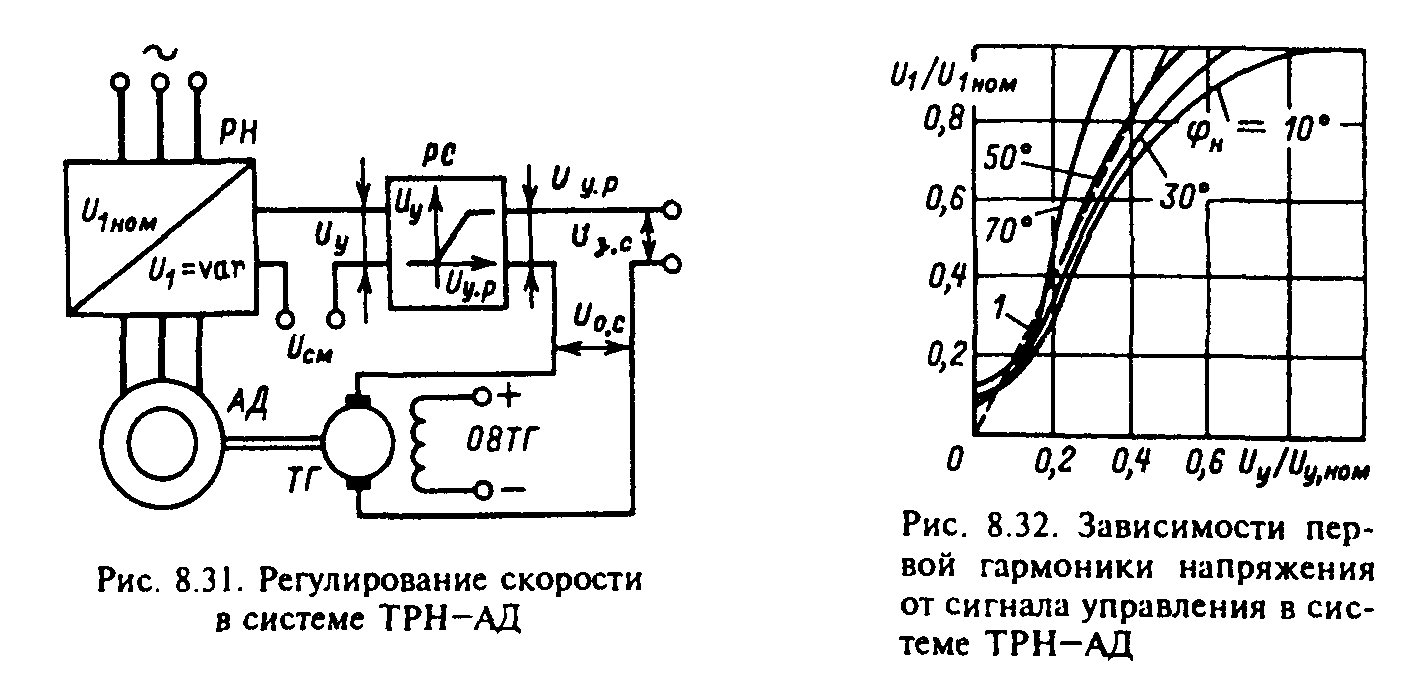
Изменение напряжения, как средство регулирования момента в разомкнутой системе может быть использовано для регулирования скорости в системе автоматического регулирования по отклонению. Для этого схемы с магнитным усилителем или тиристорным регулятором напряжения необходимо дополнить отрицательной связью по скорости. Рассмотрим основные показатели такого способа регулирования.
Схема регулирования скорости асинхронного электропривода путем изменения напряжения на статоре приведена на рис. 8.31. Здесь магнитный или тиристорный регулятор напряжения обозначен PH, введен регулятор скорости PC, выходное напряжение которого иу воздействует на обмотку управления магнитного усилителя или на вход тиристорного регулятора напряжения. На вход PC поданы сигнал задания и сигнал обратной связи по скорости получаемый с якоря тахогенератора ТГ. В цепь управления PH введен сигнал смещения, с помощью которого при устанавливается минимальное напряжение на выходе PH. Практически в схемах с магнитными усилителями для этой цели предусматривается отдельная обмотка смещения, а в тиристорных регуляторах напряжения для установки начального угла регулирования а0 обычно имеются соответствующие подстроечные элементы.
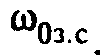
При оценке условий регулирования скорости в системе тиристорный регулятор — асинхронный двигатель (ТРН—АД) необходимо учитывать, что напряжение на выходе тиристорного регулятора несинусоидально, зависит от угла регулирования а и от угла активно-индуктивной нагрузки которой является асинхронный двигатель для ТРН при определенном скольжении s. Электромагнитный момент двигателя определяется первой гармоникой напряжения, а влияние высших гармоник невелико, и им можно пренебречь. Поэтому для расчета механических характеристик двигателя необходимо знать зависимость первой гармоники напряжения от напряжения управления при различных скольжениях s и соответственно различных
Примерные зависимости для ряда значений приведены на рис. 8.32, причем в качестве принято напряжение, которое обеспечивает изменение угла а от 0 до 150° при линейной характеристике а кривые построены при напряжении смещения Ucu, которое обеспечивает начальный угол а0 = 135°. Эти характеристики существенно нелинейны и неоднозначны в связи со значительной зависимостью напряжения от угла нагрузки
Зависимость угла нагрузки от скольжения можно получить, воспользовавшись упрощенной схемой замещения двигателя, приведенной на рис. 3.27,б:
— эквивалентные активное и индуктивное сопротивления двигателя, определяемые относительно по схеме замещения; — суммарное активное сопротивление цепи статора, включая сопротивление фазы ТРН.
Анализ (8.88) показывает, что угол изменяется в функции скольжения быстро лишь при его изменения лежат в пределах 40—60°. Для этой области кривую можно линеаризовать, как показано на рис. 8.32 (прямая l) и приближенно записать
Так как момент асинхронного двигателя пропорционален квадрату напряжения, можно записать
где — момент при данном скольжении, определяемый по естественной механической характеристике двигателя; — относительное значение первой гармоники напряжения питания двигателя.
При работе скорость двигателя в рабочей зоне механической характеристики поддерживается системой регулирования примерно постоянной, поэтому для режимов малых отклонений от точки статического равновесия (8.90) можно линеаризовать:
Подставив (8.91) в (8.89), получим уравнение механической характеристики для рассматриваемого режима:
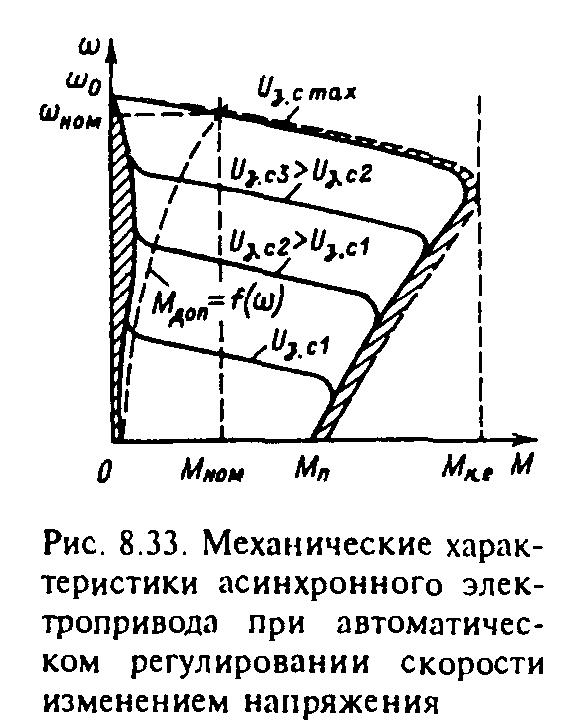
Таким образом, при принятых допущениях в замкнутой системе формируется линейная механическая характеристика со скоростью идеального холостого хода и модулем жесткости которые определяются заданием и коэффициентом обратной связи по скорости При больших жесткость искусственных характеристик получается значительной, и уравнение (8.92) удовлетворительно описывает реальную механическую характеристику. Как показано на рис. 8.33, отличия проявляются лишь в режиме, близком к холостому ходу, и при значениях напряжения, близких к Иными словами, (8.92) удовлетворительно описывает механическую характеристику замкнутой системы электропривода в возможных пределах регулирования момента
При данном способе регулирования потери в роторной цепи пропорциональны скольжению. Поэтому допустимый момент при регулировании скорости при независимой вентиляции двигателя можно определить из соотношения
Откуда
Следовательно, для того чтобы при продолжительной работе с малой скоростью двигатель не нагревался сверх допустимой температуры, необходимо снижать его нагрузку в обратно пропорциональной зависимости от скольжения. Для двигателей с самовентиляцией это снижение должно быть больше с учетом ухудшения условий охлаждения по мере роста скольжения. Зависимость показана на рис. 8.33.
Этот недостаток ограничивает область применения замкнутых систем асинхронного электропривода, основанных на регулировании напряжения, механизмами, у которых момент нагрузки при регулировании скорости быстро уменьшается, например механизмами с вентиляторной нагрузкой (см. § 1.3). Кроме того, этот способ успешно применяется в тех случаях, когда в рабочем цикле требуется кратковременное снижение скорости, а основное время электропривод работает на естественной характеристике.
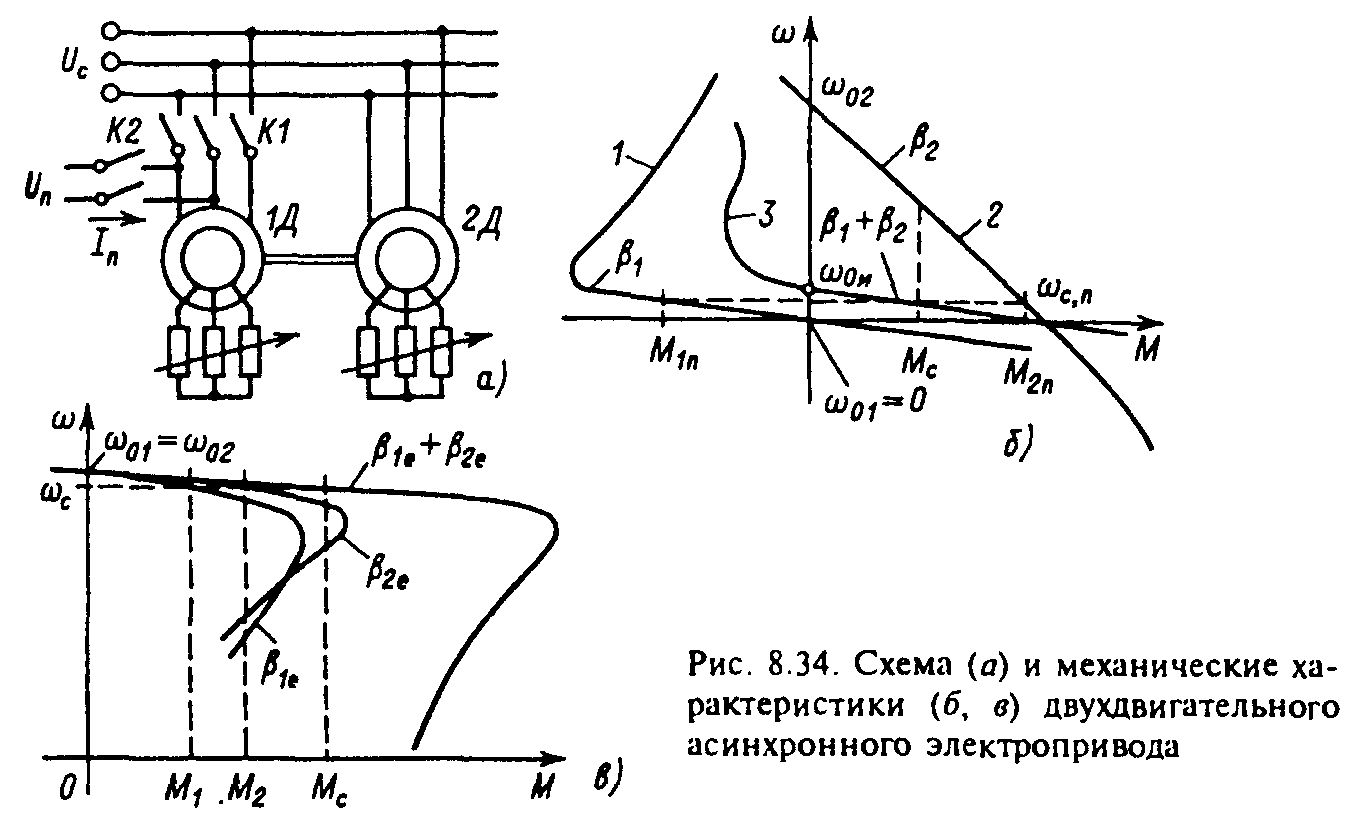
Дополнительные возможности регулирования скорости дает применение многодвигательного электропривода. Рассмотрим эти возможности на примере двухдвигательного асинхронного электропривода, схема которого приведена на рис. 8.34,а.
Благодаря наличию механической связи между роторами двигателей статических режимах работы угловые скорости двигателей одинаковы, а результирующий момент электропривода равен сумме моментов двигателей. При линеаризации механических характеристик результирующая механическая характеристика может быть получена в виде (4.127):
Рассматривая (8.94), можно убедиться, что путем целенаправленного изменения жесткостей механических характеристик двигателей, а также соотношения скоростей идеального холостого хода в двухдвигательном электроприводе можно получить результирующие искусственные характеристики, обеспечивающие регулирование скорости.
В качестве примера на рис. 8.34,a представлена схема двухдвигательного электропривода, в котором двигатель 1Д при включении контактора К1 питается от сети, а при включении контактов контактора К2 в его обмотку статора подается постоянный ток для реализации режима динамического торможения. Второй двигатель 2Д постоянно питается от сети переменного тока.
Наличие фазного ротора у каждого двигателя позволяет вводить в цепи ротора добавочные резисторы и таким образом изменять значения , а переключение двигателя 1Д в режим динамического торможения дает При этом подбором жесткостей можно получить глубокое регулирование скорости, как показано на рис. 8.34,6. Здесь добавочное сопротивление в цепи двигателя 1Д, работающего в режиме динамического торможения, равно нулю и жесткость характеристики , максимальна. Для ограничения тока и увеличения жесткости результирующей характеристики в цепь ротора двигателя 2Д введен добавочный резистор со значительным сопротивлением (характеристика 2, ) Жесткость рабочего участка результирующей характеристики , т. е. выше, чем жесткость а скорость идеального холостого хода достаточно мала. При моменте нагрузки результирующая механическая характеристика 3 обеспечивает устойчивую пониженную скорость
Недостатком данного способа регулирования скорости являются значительные потери. Результирующий момент
т. е. двигатель 1Д для получения малой скорости, работая в режиме динамического торможения, подгружает двигатель 2Д моментом соответственно
где — тормозной момент 1Д при работе на пониженной скорости
Как следствие, потери энергии в роторной части двигателя 2Д существенно больше, чем при реостатном регулировании
Для того чтобы оценить допустимую нагрузку двухдвигательного электропривода при пониженной скорости, необходимо для сравнения рассмотреть режим работы с полной скоростью, при котором оба двигателя подключены к сети переменного тока и работают на общий вал. Как показывает рис. 8.34,в, в этом случае оба двигателя работают в двигательном режиме:
Сравнивая рис. 8.34,6 и в, можно заключить, что допустимый на низкой скорости момент существенно меньше половины номинального момента агрегата .
Таким образом, если необходимо регулировать скорость при Мс= const, то при работе на полной скорости агрегат должен недоиспользоваться в 2,5—3 раза по мощности. Если на пониженной скорости электропривод должен работать малую долю времени цикла, то недоиспользование мощности агрегата из-за кратковременной перегрузки двигателя 2Д на малой скорости может быть сокращено до 1,25-1,5 раза Поэтому наиболее целесообразно применение этого способа в случаях, когда работа с пониженной скоростью в цикле весьма кратковременна. При этом перегрузки на пониженной скорости не сказываются существенно на нагреве двигателей, а низкий КПД системы не может заметно ухудшить энергетические показатели электропривода.
При полной идентичности механических характеристик обоих двигателей каждый из них несет половину общей нагрузки, и при этих условиях номинальный момент агрегата равен:
Однако практически, как показано на рис. 8.34,в, естественные характеристики двигателей вследствие разброса параметров могут несколько различаться При этом моменты, развиваемые двигателями при £ оказываются не равными:
На рис. 8.34,в , соответственно Так как по условиям нагрева двигателя должно быть первый двигатель недогружается тем в большей степени, чем меньше жесткость его характеристики. Очевидно, что если при проектировании не учесть возможного несовпадения характеристик двигателей и выбрать двигатели из условия , то двигатель с большей жесткостью примет на себя нагрузку, большую номинальной, и выйдет из строя.
Ко второй группе способов регулирования скорости асинхронного электропривода относятся частотное регулирование, особенности которого будут ниже рассмотрены, и регулирование путем изменения числа пар полюсов.
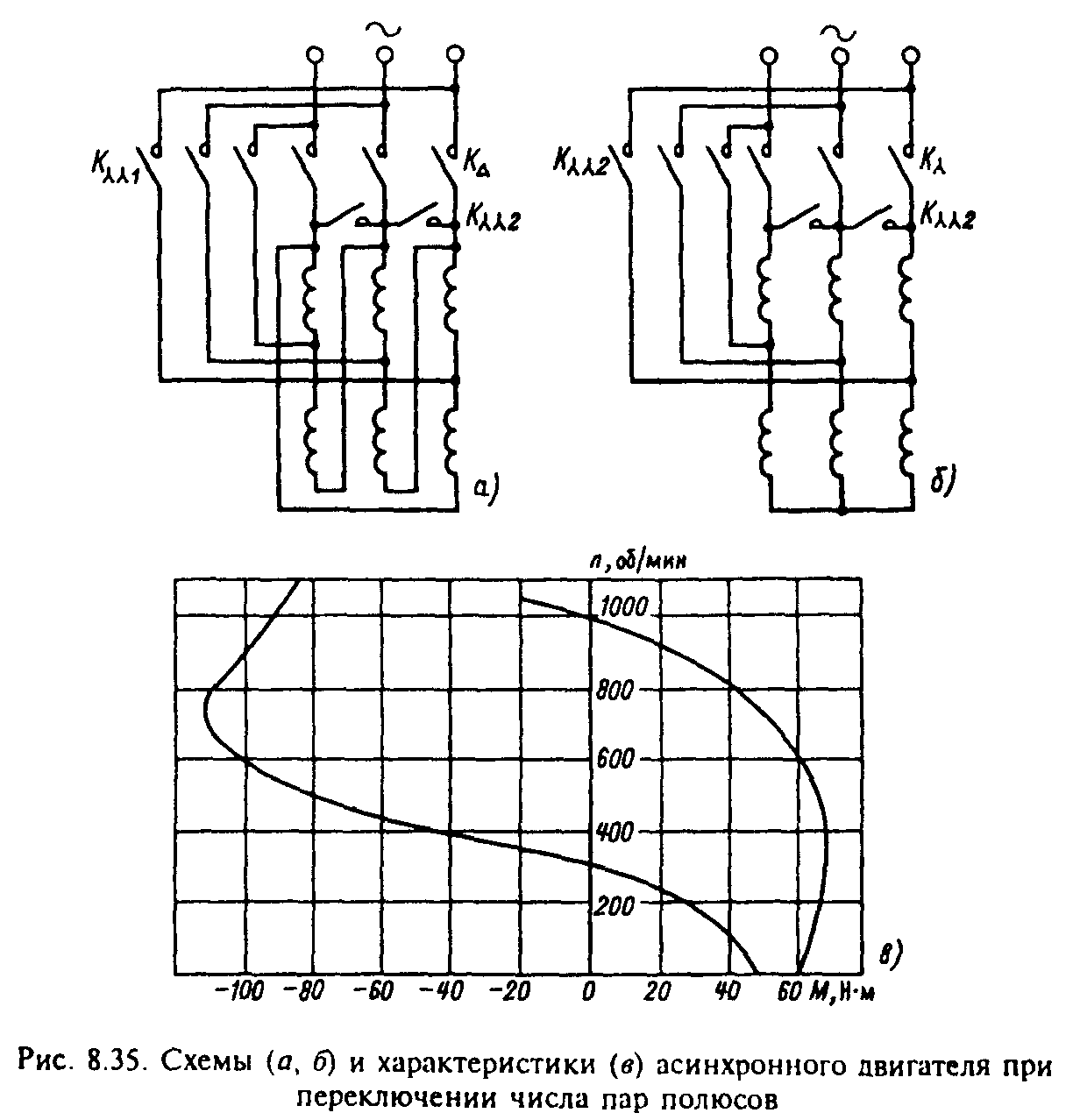
Регулирование скорости путем изменения числа пар полюсов осуществляется при питании двигателя от сети при путем переключения одной статорной обмотки с треугольника на двойную звезду (рис. 8.35,a) или со звезды на двойную звезду (рис. 8.35,6). Число пар полюсов рп при этом изменяется вдвое, что вызывает соответствующие изменения скорости поля
При наличии на статоре двигателя двух обмоток, обеспечивающих возможность указанного переключения числа пар
полюсов, можно обеспечить четыре регулировочных ступени с большими возможностями изменения рп. Следовательно, данный способ регулирования скорости требует применения специальных двигателей. Габариты и стоимость таких двигателей выше, чем у двигателей односкоростных, однако простота способа и высокая жесткость регулировочных характеристик определяют целесообразность его использования во многих практических случаях. В качестве примера на рис. 8.35,в показаны механические характеристики двухскоростного двигателя типа МТКМ 512-6/20, на статоре которого предусмотрены две независимые обмотки с числом пар полюсов
У двигателя с фазным ротором роторная обмотка выведена на контактные кольца, что создает возможность подвода напряжения не только к цепи статора, но и к цепи ротора. Активная цепь роторной обмотки, содержащая регулируемые источники напряжения, позволяет полезно использовать энергию скольжения и вследствие этого осуществлять экономичное регулирование скорости при широких пределах изменения скольжения двигателя. Этот характерный для асинхронного электропривода способ регулирования скорости подробно рассматривается ниже.

 ; 3) способы, при которых абсолютное скольжение при регулировании изменяется в широких пределах, но потери энергии скольжения в роторной цепи двигателя ограничены.
; 3) способы, при которых абсолютное скольжение при регулировании изменяется в широких пределах, но потери энергии скольжения в роторной цепи двигателя ограничены. и сигнал обратной связи по скорости
и сигнал обратной связи по скорости  получаемый с якоря тахогенератора ТГ. В цепь управления PH введен сигнал смещения, с помощью которого при
получаемый с якоря тахогенератора ТГ. В цепь управления PH введен сигнал смещения, с помощью которого при  устанавливается минимальное напряжение на выходе PH. Практически в схемах с магнитными усилителями для этой цели предусматривается отдельная обмотка смещения, а в тиристорных регуляторах напряжения для установки начального угла регулирования а0 обычно имеются соответствующие подстроечные элементы.
устанавливается минимальное напряжение на выходе PH. Практически в схемах с магнитными усилителями для этой цели предусматривается отдельная обмотка смещения, а в тиристорных регуляторах напряжения для установки начального угла регулирования а0 обычно имеются соответствующие подстроечные элементы. которой является асинхронный двигатель для ТРН при определенном скольжении s. Электромагнитный момент двигателя определяется первой гармоникой напряжения, а влияние высших гармоник невелико, и им можно пренебречь. Поэтому для расчета механических характеристик двигателя необходимо знать зависимость первой гармоники напряжения
которой является асинхронный двигатель для ТРН при определенном скольжении s. Электромагнитный момент двигателя определяется первой гармоникой напряжения, а влияние высших гармоник невелико, и им можно пренебречь. Поэтому для расчета механических характеристик двигателя необходимо знать зависимость первой гармоники напряжения  от напряжения управления
от напряжения управления  при различных скольжениях s и соответственно различных
при различных скольжениях s и соответственно различных 
 для ряда значений
для ряда значений  приведены на рис. 8.32, причем в качестве
приведены на рис. 8.32, причем в качестве  принято напряжение, которое обеспечивает изменение угла а от 0 до 150° при линейной характеристике
принято напряжение, которое обеспечивает изменение угла а от 0 до 150° при линейной характеристике  а кривые построены при напряжении смещения Ucu, которое обеспечивает начальный угол а0 = 135°. Эти характеристики существенно нелинейны и неоднозначны в связи со значительной зависимостью напряжения от угла нагрузки
а кривые построены при напряжении смещения Ucu, которое обеспечивает начальный угол а0 = 135°. Эти характеристики существенно нелинейны и неоднозначны в связи со значительной зависимостью напряжения от угла нагрузки 

 — эквивалентные активное и индуктивное сопротивления двигателя, определяемые относительно
— эквивалентные активное и индуктивное сопротивления двигателя, определяемые относительно  по схеме замещения;
по схеме замещения;  — суммарное активное сопротивление цепи статора, включая сопротивление фазы ТРН.
— суммарное активное сопротивление цепи статора, включая сопротивление фазы ТРН. изменяется в функции скольжения быстро лишь при
изменяется в функции скольжения быстро лишь при  его изменения лежат в пределах 40—60°. Для этой области кривую
его изменения лежат в пределах 40—60°. Для этой области кривую  можно линеаризовать, как показано на рис. 8.32 (прямая l) и приближенно записать
можно линеаризовать, как показано на рис. 8.32 (прямая l) и приближенно записать

 — момент при данном скольжении, определяемый по естественной механической характеристике двигателя;
— момент при данном скольжении, определяемый по естественной механической характеристике двигателя; 
 — относительное значение первой гармоники напряжения питания двигателя.
— относительное значение первой гармоники напряжения питания двигателя. скорость двигателя в рабочей зоне механической характеристики поддерживается системой регулирования примерно постоянной, поэтому для режимов малых отклонений от точки статического равновесия (8.90) можно линеаризовать:
скорость двигателя в рабочей зоне механической характеристики поддерживается системой регулирования примерно постоянной, поэтому для режимов малых отклонений от точки статического равновесия (8.90) можно линеаризовать:

 и модулем жесткости
и модулем жесткости  которые определяются заданием и коэффициентом обратной связи по скорости
которые определяются заданием и коэффициентом обратной связи по скорости  При больших
При больших  Иными словами, (8.92) удовлетворительно описывает механическую характеристику замкнутой системы электропривода в возможных пределах регулирования момента
Иными словами, (8.92) удовлетворительно описывает механическую характеристику замкнутой системы электропривода в возможных пределах регулирования момента

 показана на рис. 8.33.
показана на рис. 8.33. статических режимах работы угловые скорости двигателей одинаковы, а результирующий момент электропривода равен сумме моментов двигателей. При линеаризации механических характеристик результирующая механическая характеристика может быть получена в виде (4.127):
статических режимах работы угловые скорости двигателей одинаковы, а результирующий момент электропривода равен сумме моментов двигателей. При линеаризации механических характеристик результирующая механическая характеристика может быть получена в виде (4.127):
 для реализации режима динамического торможения. Второй двигатель 2Д постоянно питается от сети переменного тока.
для реализации режима динамического торможения. Второй двигатель 2Д постоянно питается от сети переменного тока. , а переключение двигателя 1Д в режим динамического торможения дает
, а переключение двигателя 1Д в режим динамического торможения дает  При этом подбором жесткостей можно получить глубокое регулирование скорости, как показано на рис. 8.34,6. Здесь добавочное сопротивление в цепи двигателя 1Д, работающего в режиме динамического торможения, равно нулю и жесткость характеристики
При этом подбором жесткостей можно получить глубокое регулирование скорости, как показано на рис. 8.34,6. Здесь добавочное сопротивление в цепи двигателя 1Д, работающего в режиме динамического торможения, равно нулю и жесткость характеристики  , максимальна. Для ограничения тока и увеличения жесткости результирующей характеристики в цепь ротора двигателя 2Д введен добавочный резистор со значительным сопротивлением (характеристика 2,
, максимальна. Для ограничения тока и увеличения жесткости результирующей характеристики в цепь ротора двигателя 2Д введен добавочный резистор со значительным сопротивлением (характеристика 2,  ) Жесткость рабочего участка результирующей характеристики
) Жесткость рабочего участка результирующей характеристики  , т. е. выше, чем жесткость
, т. е. выше, чем жесткость  а скорость идеального холостого хода
а скорость идеального холостого хода  достаточно мала. При моменте нагрузки
достаточно мала. При моменте нагрузки  результирующая механическая характеристика 3 обеспечивает устойчивую пониженную скорость
результирующая механическая характеристика 3 обеспечивает устойчивую пониженную скорость 

 соответственно
соответственно
 — тормозной момент 1Д при работе на пониженной скорости
— тормозной момент 1Д при работе на пониженной скорости 
 существенно меньше половины номинального момента агрегата
существенно меньше половины номинального момента агрегата  .
.
 При этом моменты, развиваемые двигателями при £
При этом моменты, развиваемые двигателями при £  оказываются не равными:
оказываются не равными:
 , соответственно
, соответственно  Так как по условиям нагрева двигателя должно быть
Так как по условиям нагрева двигателя должно быть  первый двигатель недогружается тем в большей степени, чем меньше жесткость его характеристики. Очевидно, что если при проектировании не учесть возможного несовпадения характеристик двигателей и выбрать двигатели из условия
первый двигатель недогружается тем в большей степени, чем меньше жесткость его характеристики. Очевидно, что если при проектировании не учесть возможного несовпадения характеристик двигателей и выбрать двигатели из условия  , то двигатель с большей жесткостью
, то двигатель с большей жесткостью  примет на себя нагрузку, большую номинальной, и выйдет из строя.
примет на себя нагрузку, большую номинальной, и выйдет из строя. путем переключения одной статорной обмотки с треугольника на двойную звезду (рис. 8.35,a) или со звезды на двойную звезду (рис. 8.35,6). Число пар полюсов рп при этом изменяется вдвое, что вызывает соответствующие изменения скорости поля
путем переключения одной статорной обмотки с треугольника на двойную звезду (рис. 8.35,a) или со звезды на двойную звезду (рис. 8.35,6). Число пар полюсов рп при этом изменяется вдвое, что вызывает соответствующие изменения скорости поля