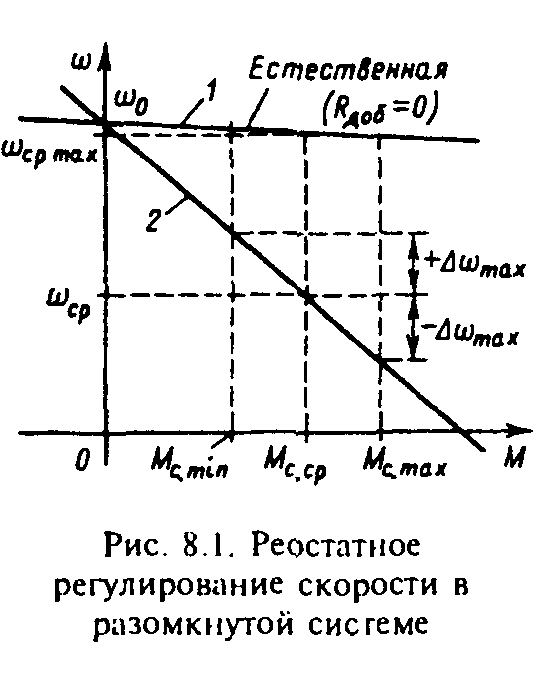
При оценке точности реостатного регулирования момента было установлено, что изменение скорости вследствие электромеханической связи является возмущением и тем более сильным, чем выше модуль жесткости характеристики. При регулировании скорости точность реостатного регулирования, напротив, повышается с увеличением модуля жесткости, а возмущением являются изменения нагрузки на валу двигателя. В этом можно убедиться, рассматривая рис. 8.1. Введение добавочного резистора приводит к снижению средней скорости от на естественной характеристике на реостатной характеристике 2, при этом, если М= Мсср= const, скорость электропривода поддерживается постоянной . Однако изменения статической нагрузки в пределах от вызывают абсолютную ошибку регулирования
где — модуль жесткости искусственной характеристики.
Соответствующее значение относительной ошибки
Из (8.2) и (8.3) следует, что абсолютная и относительная ошибки регулирования по мере увеличения сопротивления увеличиваются, причем особенно быстро увеличивается относительная ошибка, так как при увеличении уменьшаются и
Если в (8.3) принять можно получить следующее выражение, определяющее возможный диапазон регулирования скорости при заданной точности:
Соотношение (8.4) свидетельствует о том, что при реостатном регулировании при широких пределах изменения нагрузки возможный диапазон регулирования скорости невелик даже при невысокой требуемой точности регулирования. Практически при реостатном регулировании возможный диапазон регулирования скорости ограничивается значениями
При использовании реостатного регулирования следует иметь в виду, что точность регулирования скорости может дополнительно снижаться вследствие колебания других факторов, например, колебание напряжения сети, температурные изменения сопротивлений обмоток и т. п.
Плавность реостатного регулирования скорости невелика, так как для переключения ступеней регулировочного резистора требуется предусматривать контакторы. При этом стремление уменьшить массогабаритные показатели и стоимость панели управления обычно вынуждает ограничивать число ступеней значениями 3-6. К числу достоинств реостатного регулирования относятся простота и невысокие затраты на реализацию. Однако не-
достатком этого способа является увеличение потерь энергии в силовой цепи по мере снижения скорости:
При номинальной нагрузке потери энергии тем больше, чем больше диапазон регулирования скорости:
Поэтому КПД электропривода при реостатном регулировании быстро снижается по мере расширения пределов регулирования скорости. Коэффициент мощности асинхронного электропривода при этом сохраняется на уровне номинального значения. Если предположить, что двигатель имеет независимую вентиляцию, в качестве критерия допустимой по нагреву нагрузки можно принять ток силовой цепи двигателя В общем случае при реостатном регулировании для асинхронного двигателя
Аналогично и для двигателя постоянного тока с независимым или последовательным возбуждением получим
Таким образом, реостатное регулирование скорости при независимой вентиляции двигателя с точки зрения полного использования двигателя по допустимой нагрузке есть регулирование при постоянном моменте. Соответственно данный способ регулирования по условию допустимой нагрузки наиболее целесообразен для механизмов, у которых момент нагрузки не зависит от скорости: Мс= const.
Таковы основные показатели реостатного регулирования скорости в разомкнутой системе. Точность и плавность этого способа регулирования скорости могут быть существенно увеличены в замкнутой системе автоматического регулирования скорости по отклонению.
Для осуществления автоматического реостатного регулирования скорости асинхронного двигателя может быть использована система релейного регулирования момента (см. рис. 7.3), если ее
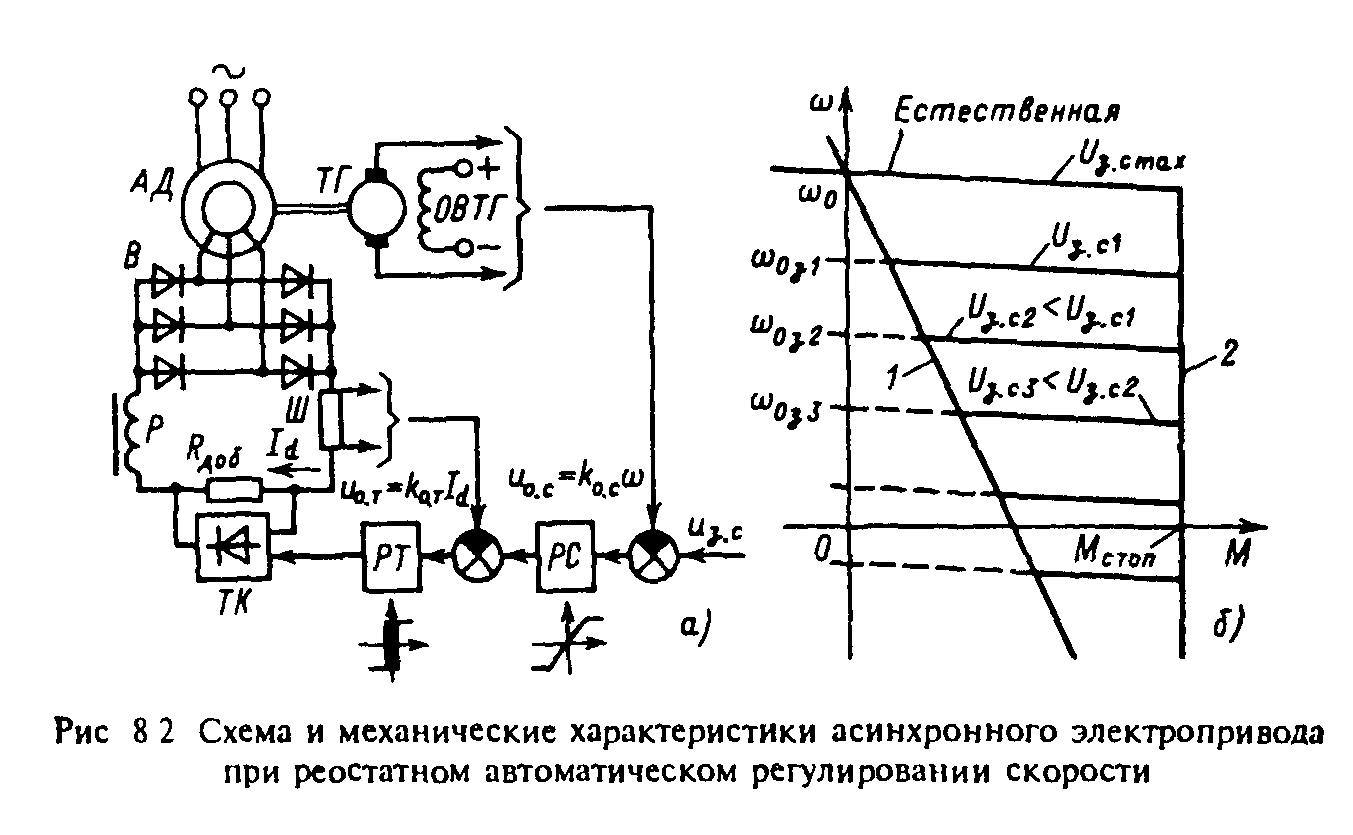
дополнить отрицательной обратной связью по скорости по схеме, показанной на рис. 8.2,а.
Уравнение механической характеристики электропривода в замкнутой системе регулирования можно записать на основе линеаризации зависимости (7.15)
положив и приняв в качестве оценки инерционности контура релейного регулирования тока значение постоянной времени Т0, соответствующей открытому состоянию тиристорного ключа ТК (см. § 7.2). При этих условиях для схемы на рис. 8 2,о можно записать
Отсюда
Положив в (8.9) р =0, получим уравнение статической механической характеристики в виде
Механические характеристики, соответствующие различным значениям , показаны на рис. 8.2,6. Пределы, в которых регулятор скорости может поддерживать скорость постоянной, ограничены при малых нагрузках реостатной характеристикой (резистор не выключается), а при больших — характеристикой
2, которая определяется максимальным значением выходного напряжения регулятора скорости, соответствующим насыщению его характеристики, показанной на рис. 8.2,а. Объясняется это тем, что в данной схеме выходное напряжение PC является сигналом задания тока а следовательно, и момента М.
Модуль жесткости статической характеристики пропорционален подбором значений которого можно получить достаточно жесткие регулировочные механические характеристики. Однако при этом следует иметь в виду, что введение обратной связи по скорости влияет на динамику системы.
С помощью (8.8) и уравнения движения электропривода на рис. 8.3,а построена структурная схема рассматриваемого контура регулирования скорости. Для анализа процессов по управляющему воздействию положим в ней М = 0 и приведем ее к единичной обратной связи. Структурная схема примет вид, показанный на рис. 8.3,б. В схеме принято обозначение электромеханической постоянной времени в замкнутой системе:
Соответствующая ЛАЧХ разомкнутого контура представлена на рис. 8.3,в. Как видно из рисунка, быстродействие контура регулирования ограничивается так как для получения требуемого качества регулирования необходимо выполнение условия а значения по мере увеличения уменьшаются в обратно пропорциональной зависимости.
Настройке на технический оптимум соответствует соотношение постоянных времени контура
Такое соотношение обеспечивается при следующем значении коэффициента обратной связи по скорости:
Следует учитывать, что постоянная времени Т0 зависит от скольжения двигателя, уменьшаясь при его возрастании.
Для того чтобы качество регулирования оставалось высоким во всем диапазоне регулирования, расчетное значение постоянной времени необходимо принимать равным наибольшему значению Т0.
Соотношение (8.12) характеризует предельную жесткость механической характеристики, которую можно получить в данной схеме при заданном качестве регулирования без применения динамической коррекции.

 на естественной характеристике
на естественной характеристике  на реостатной характеристике 2, при этом, если М= Мсср= const, скорость электропривода поддерживается постоянной
на реостатной характеристике 2, при этом, если М= Мсср= const, скорость электропривода поддерживается постоянной  . Однако изменения статической нагрузки в пределах от
. Однако изменения статической нагрузки в пределах от  вызывают абсолютную ошибку регулирования
вызывают абсолютную ошибку регулирования
 — модуль жесткости искусственной характеристики.
— модуль жесткости искусственной характеристики.
 увеличиваются, причем особенно быстро увеличивается относительная ошибка, так как при увеличении
увеличиваются, причем особенно быстро увеличивается относительная ошибка, так как при увеличении  уменьшаются
уменьшаются  и
и 

 можно получить следующее выражение, определяющее возможный диапазон регулирования скорости при заданной точности:
можно получить следующее выражение, определяющее возможный диапазон регулирования скорости при заданной точности:


 В общем случае при реостатном регулировании для асинхронного двигателя
В общем случае при реостатном регулировании для асинхронного двигателя


 и приняв в качестве оценки инерционности контура релейного регулирования тока
и приняв в качестве оценки инерционности контура релейного регулирования тока  значение постоянной времени Т0, соответствующей открытому состоянию тиристорного ключа ТК (см. § 7.2). При этих условиях для схемы на рис. 8 2,о можно записать
значение постоянной времени Т0, соответствующей открытому состоянию тиристорного ключа ТК (см. § 7.2). При этих условиях для схемы на рис. 8 2,о можно записать


 , показаны на рис. 8.2,6. Пределы, в которых регулятор скорости может поддерживать скорость постоянной, ограничены при малых нагрузках реостатной характеристикой
, показаны на рис. 8.2,6. Пределы, в которых регулятор скорости может поддерживать скорость постоянной, ограничены при малых нагрузках реостатной характеристикой  (резистор
(резистор  не выключается), а при больших — характеристикой
не выключается), а при больших — характеристикой а следовательно, и момента М.
а следовательно, и момента М. пропорционален
пропорционален  подбором значений которого можно получить достаточно жесткие регулировочные механические характеристики. Однако при этом следует иметь в виду, что введение обратной связи по скорости влияет на динамику системы.
подбором значений которого можно получить достаточно жесткие регулировочные механические характеристики. Однако при этом следует иметь в виду, что введение обратной связи по скорости влияет на динамику системы.
 так как для получения требуемого качества регулирования необходимо выполнение условия
так как для получения требуемого качества регулирования необходимо выполнение условия 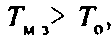 а значения
а значения  по мере увеличения
по мере увеличения  уменьшаются в обратно пропорциональной зависимости.
уменьшаются в обратно пропорциональной зависимости.

 необходимо принимать равным наибольшему значению Т0.
необходимо принимать равным наибольшему значению Т0.