Одной из чрезвычайно интересных и полезных особенностей ГС является возможность определения в нем вычислительной причинности. Чтобы пояснить суть этого термина, рассмотрим три формы записи одного и того же уравнения – закона Ома (элемента потерь графа связей):
; (2.31)
; (2.32)
. (2.33)
Первая формула представляет собой неявную запись закона, говорящую о том, что между током и напряжением существует взаимно однозначное соответствие.
Уравнения (2.32) и (2.33) не только задают закон Ома, но и показывают, как вычислить одну физическую величину через другую. Тем самым эти уравнения задают отношения причинности между переменными. В (2.32) причиной является ток , а следствием – напряжение . В (2.33), наоборот, напряжение выступает как причина появления тока . Заметим, что в реальной электронной схеме, как правило, не имеет смысла искать ответ на вопрос: что появляется раньше – напряжение или ток. Причинность может быть чаще всего только вычислительной, имеющей смысл при математическом моделировании.
Причинность, а вместе с ней и форму зависимости между усилиями и потоками можно определить в графе связей. Она задается так называемой причинной стрелкой – отрезком на одном из концов связи. На рис. 2.22 показаны два возможных варианта причинности на связи, соединяющей 1-узел и элемент потерь. В первом варианте поток является причиной, т.е. входной переменной элемента потерь, а усилие является следствием или выходной переменной элемента потерь. Это дополнительно иллюстрируется на рисунке стрелками, наглядно показывающими вход и выход элемента . Первому варианту соответствует уравнение
.
Альтернативному варианту, представленному на рис. 2.22, b, соответствует уравнение
.
Здесь причиной для элемента является усилие , а следствием поток .
Рис. 2.22. Варианты причинности: a – причинность по отношению к 1-узлу;
b – причинность по отношению к
Заметим, что причинность на рис. 2.22 можно рассматривать не только по отношению к элементу потерь , но и по отношению к 1-узлу. Тогда в первом варианте усилие является причиной (входом) для 1-узла, а поток – следствием (выходом) узла. Таким образом, каждая переменная является одновременно причиной (входом) для одного элемента, и следствием (выходом) для другого элемента.
Будем называть связь причинной по отношению к некоторому элементу, если причинная стрелка определяет в качестве входа этого элемента усилие . Тогда связь на рис. 2.22, а можно назвать причинной по отношению к 1-узлу, а связь на рис. 2.22, b – причинной по отношению к элементу .
Возможные варианты расстановки причинности на связях различных элементов представлены в табл. 2.4. Расстановка причинных отношений в графе подчиняется перечисленным ниже требованиям.
1. Причинность в связях источников энергии определяется типом источника. Для источника потока связь всегда должна быть причинной по отношению к источнику, а для источника усилия наоборот – причинной по отношению к узлу, с которым связан источник усилия.
2. Аккумуляторы подобно элементу потерь могут иметь оба варианта причинности. Один из вариантов соответствует интегральной причинности, другой дифференциальной – в соответствии с формой правой части уравнений аккумуляторов. Как это видно из табл. 2.4, интегральной причинности соответствует причинность по отношению к элементу для инерционности и причинность по отношению к узлу для емкости .
3. Гиратор и трансформатор тоже могут иметь два варианта задания причинности. При этом трансформатор сохраняет направление причинности, а гиратор меняет направление причинности на противоположное.
4. 0-узел может иметь одну и только одну причинность по отношению к 0-узлу связь. В противоположность этому все связи, кроме одной, должны быть причинными по отношению к 1-узлу.
Перечисленные правила позволяют расставить причинные отношения в любом графе связей, причем, как правило, несколькими способами. Можно рекомендовать следующую последовательность выполнения этой процедуры.
1. В первую очередь расставляются причинные отношения на связях источников энергии, поскольку они предопределены типами источников и не допускают свободы выбора.
2. Затем задаются причинности на связях аккумуляторов. Можно рекомендовать для всех аккумуляторов выбирать один тип причинности, например, интегральный.
3. Последовательно, в соответствии с правилами, расставляются причинные отношения на остальных связях графа. Если на этом этапе появляется причинное противоречие, то можно вернуться к предыдущему пункту и изменить направление причинности у одного или нескольких аккумуляторов.
Таблица 2.4
Варианты расстановки символов причинности на ГС
ГС
Уравнения
Представление в операторно-структурной схеме
Окончание табл. 2.4
ГС
Уравнения
Представление в операторно-структурной схеме
Один из вариантов расстановки причинных отношений в ГС электрической схемы приведен на рис. 2.23. Здесь связь емкости имеет дифференциальную причинность, а связи инерционности и емкости – интегральную. В этом графе невозможно одновременно обеспечить интегральную причинность для емкостей и .
Рис. 2.23. Граф с расставленными причинными отношениями
Рис. 2.24 демонстрирует два варианта расстановки причинности для графа связей двигателя постоянного тока. В первом варианте выбраны интегральные, во втором – дифференциальные причинные отношения в связях инерционностей.
Рис. 2.24. Причинные отношения в графе связей ДПТ:
a – интегральные; b – дифференциальные
2.9. Построение операторно-структурных схем по графу связей
Построение операторно-структурных схем основано на том, что явные зависимости потоков и усилий для элементов ГС, получаемые после расстановки отношений причинности, могут быть, в случае линейных систем, отображены в виде функциональных направленных звеньев с соответствующими передаточными функциями, как это показано в последней колонке табл. 2.3.
Трансформаторы и гираторы в структурной схеме представляются парами одинаковых звеньев, одно из которых передает сигнал в прямом направлении, другое – в обратном.
Каждый 0-узел представляется в структурной схеме точкой разветвления для усилий и сумматором для потоков. Каждый 1-узел представляется, наоборот, точкой разветвления для потоков и сумматором для усилий. Нетрудно заметить, что в каждом узле только одна связь, отличающаяся причинностью, соответствует сумме, остальные соответствуют слагаемым.
Знаки слагаемых зависят от направления полустрелок на связях. Если направление связи слагаемого совпадает с направлением связи суммы, то слагаемое входит в сумму со знаком «плюс», в противном случае – со знаком «минус».
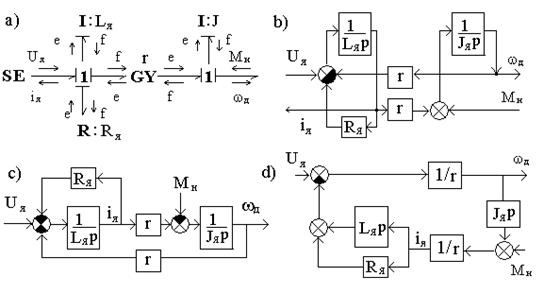
Процесс построения структурной схемы двигателя постоянного тока показан на рис. 2.25. Для большей наглядности на рис. 2.25, b сохранена форма структурной схемы, соответствующая форме графа связей. Перерисованная в более привычном виде эта схема приведена на рис. 2.25, c.
Рис. 2.25. Построение структурной схемы двигателя постоянного тока
Кроме этого, на рис. 2.25, d приведен и другой вариант структурной схемы, построенный по графу связей двигателя постоянного тока с дифференциальными причинностями (рис. 2.2, b). В соответствии с выбранной причинностью в этой схеме, вместо интегрирующих, появились дифференцирующие звенья.
Возможность получения различных вариантов структурных схем является одним из достоинств ГС.
Второй пример, проиллюстрированный на рис. 2.26, демонстрирует процедуру построения математической модели динамики механической многомассовой системы с упругими связями.
Рис. 2.26. Построение структурной схемы многомассовой механической системы с упругими связями
Для того чтобы сразу получить удобную форму структурной схемы, можно предварительно проанализировать прямой путь прохождения сигнала в графе с расставленными причинными отношениями. Этот путь полностью задается направлениями причинности в узлах графа. Так, начинаясь с входного усилия в связи с номером 1, прямой путь может продолжиться только вдоль связи с номером 2, так как в связи 3 направление причинности противоположно. В 3-ю связь прямой путь может прийти только из второй связи после его прохождения через инерционность. Таким образом, прямой путь прохождения сигнала в структурной схеме выглядит довольно извилистым в графе связей. После построения прямого пути в структурной схеме системы (рис. 2.26, c) остается только замкнуть обратные связи.

 ; (2.31)
; (2.31) ; (2.32)
; (2.32) . (2.33)
. (2.33) , а следствием – напряжение
, а следствием – напряжение  . В (2.33), наоборот, напряжение
. В (2.33), наоборот, напряжение  является причиной, т.е. входной переменной элемента потерь, а усилие
является причиной, т.е. входной переменной элемента потерь, а усилие  является следствием или выходной переменной элемента потерь. Это дополнительно иллюстрируется на рисунке стрелками, наглядно показывающими вход и выход элемента
является следствием или выходной переменной элемента потерь. Это дополнительно иллюстрируется на рисунке стрелками, наглядно показывающими вход и выход элемента  . Первому варианту соответствует уравнение
. Первому варианту соответствует уравнение .
. .
.
 и причинность по отношению к узлу для емкости
и причинность по отношению к узлу для емкости  .
. и трансформатор
и трансформатор  тоже могут иметь два варианта задания причинности. При этом трансформатор сохраняет направление причинности, а гиратор меняет направление причинности на противоположное.
тоже могут иметь два варианта задания причинности. При этом трансформатор сохраняет направление причинности, а гиратор меняет направление причинности на противоположное.





















 имеет дифференциальную причинность, а связи инерционности
имеет дифференциальную причинность, а связи инерционности  – интегральную. В этом графе невозможно одновременно обеспечить интегральную причинность для емкостей
– интегральную. В этом графе невозможно одновременно обеспечить интегральную причинность для емкостей