Правило циклов [24] позволяет для направленного графа или структурной схемы записать передаточную функцию между любыми ее входами и выходами. В соответствии с этим правилом передаточная функция графа определяется как
, (2.34)
где – определитель графа;
– передаточная функция -го пути между заданными входом и выходом;
– определитель сокращенного графа, образующегося в результате исключения пути с передаточной функцией и вершин, через которые этот путь проходит, из исходного графа.
Определитель графа может быть записан следующим образом:
, (2.35)
где – -е произведение передаточных функций циклов для циклов графа, взятых из множества независимых циклов. Сумма берется по всевозможным таким комбинациям.
Поясним некоторые из используемых терминов. Цикломназывается замкнутый контур в графе или структурной схеме. Передаточная функция цикла определяется как произведение передаточных функций всех звеньев, входящих в цикл.
Независимыми называются циклы, не касающиеся друг друга, т.е. не имеющие в структурной схеме общих точек.
В формуле (2.35) – функция -го контура, – произведение передаточных функций двух не касающихся друг друга контуров, – произведение передаточных функций трех взаимно не касающихся контуров и т.д.
Например, в структурной схеме двигателя постоянного тока, приведенной на рис. 2.27, есть два цикла и с передаточными функциями
Циклы касаются друг друга, так как имеют общий участок, включающий сумматор и звено с передаточной функцией , поэтому определитель
.
Рис. 2.27. Применение правила циклов к структурной схеме
Прямой путь от входного воздействия к выходной величине проходит через элементы с передаточными функциями . Соответственно, передаточная функция этого пути равна
.
Этот путь касается обоих циклов, поэтому сокращенный граф циклов не имеет. Тогда , а передаточная функция двигателя определится как
.
Путь от возмущающего момента нагрузки определяется выражением
.
Этот путь не касается цикла , поэтому определитель сокращенного графа
,
а передаточная функция двигателя по возмущению
.
Вся информация, необходимая для расчета передаточной функции, есть, очевидно, и в графе связей, так как из него можно получить структурную схему, к тому же в различных вариантах. Рис. 2.28, а иллюстрирует поиск пути и циклов и в графе связей рассмотренной выше модели двигателя.
Путь в ГС проходит вдоль связей, не меняющих направления причинности в узлах графа. Изменение причинности (т.е. изменение усилия на поток и обратно) может происходить только в односвязных элементах ( ) и в гираторе.
Рис. 2.28. Пути и циклы в графе связей
Циклы в ГС, как это показано на рис. 1.28, c, образуются цепочками связей, сохраняющими направление причинности и заканчивающимися на обоих концах односвязными элементами . Отметим, что источники энергии в циклы входить не могут. Как это показано на рис. 2.29, цикл может включать последовательность 0-узлов и 1-узлов (рис. 2.29, а), трансформаторы (рис. 2.29, b) и гираторы (рис. 2.29, c). Передаточные функции циклов на рис. 2.29, a, b, c имеют вид, соответственно:
Коэффициенты передачи трансформаторов и гираторов входят в передаточную функцию цикла в квадрате, поскольку цикл проходит через них дважды: один раз в прямом направлении, другой раз – в обратном.
Циклы, образуемые цепочками связей, называются плоскими циклами.
Рис. 2.29. Примеры плоских циклов
Рассмотрим решение задачи расчета передаточной функции механизма с редуктором, граф которого приведен на рис. 2.30.
Рис. 2.30. Циклы в графе связей
Передаточная функция единственного прямого пути , проходящего последовательно через инерционность , трансформатор , емкость и инерционность определяется произведением передаточных коэффициентов перечисленных элементов
Граф содержит 5 циклов, отмеченных штриховыми линиями в графе. Передаточные функции циклов
Для того чтобы найти все пары, тройки и т.д. не касающихся циклов, удобно построить вспомогательный граф (рис. 2.30, b), в котором каждая вершина соответствует одному из циклов, а дуга между вершинами проводится, если циклы не касаются.
Каждая дуга в этом графе соответствует паре не касающихся циклов. Таких пар пять: .
Вспомогательный граф наглядно показывает также тройку независимых циклов , которая образует в треугольник. Четверок независимых циклов, которые образовали бы четырехугольник, здесь нет. Таким образом, определитель графа связей можно записать как
Путь не касается только цикла , поэтому а передаточная функция системы имеет вид
.
После необходимых подстановок получим
При использовании правила циклов необходимо учитывать, что знак передаточной функции цикла в ГС всегда отрицательный. Это следует из того, что полустрелки на концах цепочки связей в цикле, как это видно из рис. 2.29, всегда направлены в противоположные стороны. Для определения знака передаточной функции пути тоже не обязательно просматривать все изменения знака в цепочке связей, достаточно сравнить направления полустрелок в начале и конце пути.
2.11. Общие принципы графического представления технических систем в пакетах автоматизированного моделирования
Аппарат графов связей представляет собой хороший инструмент для аналитического моделирования, для получения математических моделей систем и объектов. Однако использование элементов графов связей в автоматизированном моделировании имеет ряд недостатков. Во-первых, структура в виде графа связей является слишком детальной при описании сложных систем, например механических объектов в пространственном движении. Модель становится необозримой и сложной для восприятия. Во-вторых, аппарат графов связей непривычен специалистам предметных областей. Более предпочтительными являются электрическая схема при исследовании электрических систем, или кинематическая механическая цепь, при исследовании пространственных механизмов. Эти сложности заставляют искать в рамках компонентного моделирования другие формы задания графической информации об объекте.
Проблемы моделирования систем с элементами различной физической природы неоднократно поднимались и рассматривались рядом исследователей. В России заслуживает внимания группа авторов, опубликовавших ряд работ по теоретическим проблемам моделирования сложных физически неоднородных систем и реализовавших свои идеи в виде достаточно эффективного для своего времени пакета прикладных программ [1, 6]. Эти работы тем более заслуживают внимания, что многие изложенные в них идеи явно проглядывают в современных пакетах визуального моделирования.
Практически, в разработанном пакете присутствовали все те главные особенности пакетов автоматизированного моделирования, которые допускал уровень развития технических средств, а именно, графическое представления исходной информации о моделируемой системе, использование библиотек моделей компонентов, использование компонентов как с направленными, так и не направленными связями, использование информационных и энергетических связей и т.д.
Рассмотрим вкратце основные идеи упомянутых работ и сравним их с возможностями современных пакетов визуального моделирования.
В [1] в качестве графической формы модели введена так называемая формализованная схема, являющаяся некоторым обобщением других типов схем: структурной, принципиальной, кинематической, графа связей. В рамках такой схемы каждая часть моделируемой системы представляется наиболее удобным для нее способом.
Формализованная схема может включать типовые элементы с двумя типами связей. Связи первого типа называются информационными. Такие связи отражают передачу сигналов или информации в системе и полностью соответствуют связям, используемым при построении функциональных и структурных схем. Направление передачи сигнала отображается на информационной связи стрелкой. В зависимости от направления стрелки информационная связь может быть входом или выходом элемента.
Связи второго типа отражают передачу энергии в системе и называются энергетическими. Такие связи используются при моделировании физических объектов, в частности, электрических схем, исполнительных механизмов и приводов. Эти связи подобны связям в ГС.
Формализованная схема определена как произвольная совокупность элементов, внешние связи которых соединяются в точках, называемых узлами схемы. Если пронумеровать узлы схемы числами от 0 до , то совокупности узлов можно поставить в соответствие вектор переменных , называемый по аналогии с электрическими цепями вектором потенциальных переменных.
Энергетические связи в формализованной схеме называются ветвями схемы. Совокупности ветвей, пронумерованных в схеме числами от 1 до , ставится в соответствие вектор потоковых переменных . Для потоковых переменных выполняется правило: их алгебраическая сумма в каждом узле схемы равна нулю. Таким образом, потоковые переменные – это аналог токов в электрических цепях.
Однако, в отличие от электрических цепей, потенциальные и потоковые переменные могут быть не только скалярными, но и векторами произвольной размерности.
Частным случаем формализованной схемы является структурная схема. Она строится с использованием типовых звеньев, соединенных информационными направленными связями. В структурной схеме присутствуют только потенциальные переменные, связанные с узлами схемы. Потоковых переменных в структурной схеме нет. На рис. 2.31 представлена структурная схема в нотации пакета REMOS [6].
Данная схема описывается вектором переменных схемы . Из них переменные и – переменные входа и выхода.
На рис. 2.32 аналогичная схема представлена в нотации MATLAB/Simulink. Современный графический интерфейс пакета Simulink позволил отказаться от нумерации связей в структурной схеме.
Рис. 2.31. Структурная схема в нотации пакета REMOS
Рис. 2.32. Структурная схема в нотации MATLAB/Simulink
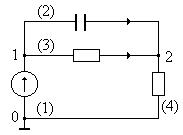
Приведенные определения позволяют наиболее естественным образом представлять структуру объектов различной физической природы и их систем управления. Например, электрическая цепь может быть представлена своей принципиальной схемой, построенной из типовых элементов (резисторов, емкостей, транзисторов и др.). Для примера на рис. 2.33 приведена простая электрическая схема с энергетическими связями. В ней узлам с номерами 0, 1, 2 соответствуют потенциальные переменные – электрические потенциалы . Ветвям, номера которых отмечены в скобках, соответствуют потоковые переменные – электрические токи .
При моделировании механических объектов удобно использовать подход, эквивалентный методу графов связей, с учетом некоторых изменений в принятой терминологии и в условных обозначениях элементов.
Потоковыми переменными в механических системах удобно считать силы и моменты сил, а потенциальными – линейные и угловые скорости. В этом случае 1-узел графа связей может изображаться в схеме просто точкой соединения связей, т.е. узлом схемы, и жесткое соединение твердых тел (рис. 2.11) отображается в схеме более наглядно – просто соединением связей элементов в узле схемы.
Подвижное соединение твердых тел, которое на ГС отображается 0-узлом (рис. 2.12), в схеме отображается элементом, называемым одномерным кинематическим 1-узлом. В названии элемента отражается свойство узла предоставлять одну степень свободы в относительном движении.
С учетом введенных изменений любой граф связей может быть изображен в виде схемы с использованием соответствующих элементов. Для иллюстрации на рис. 2.34 приведена схема механической вращательной системы, соответствующая графу связей, построенному на рис. 2.17. В этой схеме пронумерованы узлы, которым соответствуют угловые скорости и ветви (номера ветвей даны в скобках), которыми соответствуют вращающие моменты .
Рис. 2.33
Рис. 2.34
Достоинством формализованной схемы является возможность использования моделей механических элементов с векторными энергетическими связями в качестве компонентов для моделирования пространственного движения механизмов. Такие элементы могут быть построены, в частности, с использованием аппарата графов связей. Примеры формирования сложных компонентов механических цепей рассмотрены в работах [1, 6].
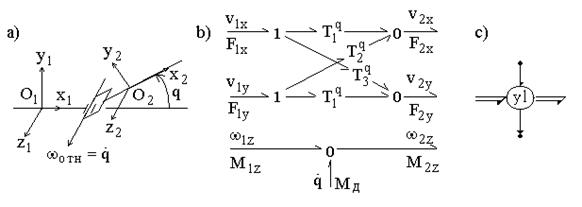
На рис. 2.35 приведена модель вращательной кинематической пары, ось вращения которой параллельна осям и , в результате чего все звенья движутся в плоскости .
Рис. 2.35. Модель вращательной кинематической пары: a – кинематическая схема; b – граф связей; c – компонент формализованной схемы
Такому соединению соответствуют уравнения:
,
где – матрица поворота относительно оси ;
– вектор угловой скорости для вращения относительно оси ;
и – векторы силы в плоском движении;
и – векторы линейной скорости в плоском движении.
Кроме этого, как следует из графа, момент, приложенный в шарнире
.
В этом графе коэффициенты передачи трансформаторов определяются выражениями:
где угол поворота определяется из уравнения: .
Подобным же образом можно получить и представить математические модели твердых тел.
Моделей трех элементов – звена, шарнира и опоры, достаточно для графического представления кинематической схемы пространственного механизма. С использованием этих элементов схема механизма строится просто как последовательное соединение звеньев и шарниров (рис. 2.35). Компонент «основание» необходим в схеме для задания направления силы тяжести.
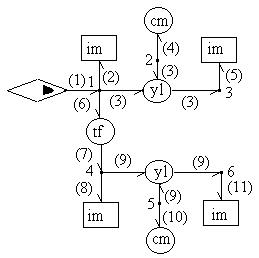
Приведенная на рис. 2.36 схема двухзвенного манипулятора в нотации пакета REMOS – векторная. В ней каждому из узлов 1–5 соответствует векторная потенциальная переменная
, ,
включающая проекции векторов линейной и угловой скоростей соответствующей точки механизма на связанные оси, а также проекции единичного вектора силы тяжести.
Рис. 2.36. Схема двухзвенного манипулятора
Каждой из ветвей с номерами 1–9 соответствует векторная потоковая переменная
, ,
включающая проекции векторов силы и вращающего момента реакции связи. Узлам с номерами 6, 7 соответствуют скалярные переменные – относительные скорости вращения в шарнирах, а узлам 8, 9 – углы поворота в первом и втором шарнирах соответственно. Ветвям 10–13 соответствуют скалярные потоковые переменные – вращающие моменты приводов.
Пример моделирования системы с использованием энергетических и структурных компонентов приведен на рис. 2.37. Рассмотрена схема системы управления двухзвенного манипулятора, в которой по каждой из степеней подвижности реализован простейший закон формирования управляющего момента
,
где – заданное значение угла поворота в сочленении (переменные в схеме);
– угол поворота (переменные ).
В этой схеме дополнительно компонентами учтены моменты инерции механической части привода.
Особенностью схемы являются элементы, названные в [1, 6] управляемыми источниками. Их роль – преобразовать информационную переменную в энергетическую, в управляющий момент, приложенный в шарнире.
Рис. 2.37
В современных пакетах автоматизированного моделирования механических цепей те детали, которые ранее отражались на схеме, в частности, номера узлов и ветвей, или неявно задавались в модельном соглашении, например, порядок расположения переменных в векторах связей, определяются самой формализованной схемой. Однако общие принципы представления систем, содержащих энергетические и информационные элементы, во многом сохранились. Например, в приведенной на рис. 2.38 модели того же самого двухзвенного манипулятора в нотации пакета SimMechaniks, верхняя часть схемы представляет собой кинематическую цепь, включающую основание, два вращательных кинематических узла и два твердых тела. В схеме присутствуют порты для соединения физических элементов, помеченные символами и на вращательных кинематических узлах, и информационные порты, служащие для соединения энергетической и сигнальной части. Блок привода играет ту же роль, что и управляемый источник на рис. 2.36. Схема управления вторым приводом свернута в подсистему.
Рис. 2.38
Глава 3 Исследование ТЕХНИЧЕСКИХ систем во временной области

 , (2.34)
, (2.34) – определитель графа;
– определитель графа; – передаточная функция
– передаточная функция  -го пути между заданными входом и выходом;
-го пути между заданными входом и выходом; – определитель сокращенного графа, образующегося в результате исключения пути с передаточной функцией
– определитель сокращенного графа, образующегося в результате исключения пути с передаточной функцией  , (2.35)
, (2.35) –
–  -е произведение передаточных функций циклов для
-е произведение передаточных функций циклов для  циклов графа, взятых из множества независимых циклов. Сумма берется по всевозможным таким комбинациям.
циклов графа, взятых из множества независимых циклов. Сумма берется по всевозможным таким комбинациям. функция
функция  – произведение передаточных функций двух не касающихся друг друга контуров,
– произведение передаточных функций двух не касающихся друг друга контуров,  – произведение передаточных функций трех взаимно не касающихся контуров и т.д.
– произведение передаточных функций трех взаимно не касающихся контуров и т.д. и
и  с передаточными функциями
с передаточными функциями
 , поэтому определитель
, поэтому определитель .
.
 к выходной величине
к выходной величине  проходит через элементы с передаточными функциями
проходит через элементы с передаточными функциями  . Соответственно, передаточная функция этого пути равна
. Соответственно, передаточная функция этого пути равна .
. , а передаточная функция двигателя определится как
, а передаточная функция двигателя определится как .
. определяется выражением
определяется выражением .
. ,
, .
. и циклов
и циклов  ) и в гираторе.
) и в гираторе.
 , трансформатор
, трансформатор  , емкость
, емкость  и инерционность
и инерционность  определяется произведением передаточных коэффициентов перечисленных элементов
определяется произведением передаточных коэффициентов перечисленных элементов
 .
. , которая образует в треугольник. Четверок независимых циклов, которые образовали бы четырехугольник, здесь нет. Таким образом, определитель графа связей можно записать как
, которая образует в треугольник. Четверок независимых циклов, которые образовали бы четырехугольник, здесь нет. Таким образом, определитель графа связей можно записать как
 , поэтому
, поэтому  а передаточная функция системы имеет вид
а передаточная функция системы имеет вид .
.
 , то совокупности узлов можно поставить в соответствие вектор переменных
, то совокупности узлов можно поставить в соответствие вектор переменных  , называемый по аналогии с электрическими цепями вектором потенциальных переменных.
, называемый по аналогии с электрическими цепями вектором потенциальных переменных. . Для потоковых переменных выполняется правило: их алгебраическая сумма в каждом узле схемы равна нулю. Таким образом, потоковые переменные – это аналог токов в электрических цепях.
. Для потоковых переменных выполняется правило: их алгебраическая сумма в каждом узле схемы равна нулю. Таким образом, потоковые переменные – это аналог токов в электрических цепях. . Из них переменные
. Из них переменные  и
и  – переменные входа и выхода.
– переменные входа и выхода.
 . Ветвям, номера которых отмечены в скобках, соответствуют потоковые переменные – электрические токи
. Ветвям, номера которых отмечены в скобках, соответствуют потоковые переменные – электрические токи  .
. и ветви (номера ветвей даны в скобках), которыми соответствуют вращающие моменты
и ветви (номера ветвей даны в скобках), которыми соответствуют вращающие моменты  .
.
 и
и  , в результате чего все звенья движутся в плоскости
, в результате чего все звенья движутся в плоскости  .
.
 ,
, – матрица поворота относительно оси
– матрица поворота относительно оси  ;
; – вектор угловой скорости для вращения относительно оси
– вектор угловой скорости для вращения относительно оси  ;
; и
и  – векторы силы в плоском движении;
– векторы силы в плоском движении; и
и  – векторы линейной скорости в плоском движении.
– векторы линейной скорости в плоском движении. .
.
 определяется из уравнения:
определяется из уравнения:  .
. ,
,  ,
,
 ,
,  ,
, – относительные скорости вращения в шарнирах, а узлам 8, 9 – углы поворота в первом и втором шарнирах соответственно. Ветвям 10–13 соответствуют скалярные потоковые переменные – вращающие моменты приводов.
– относительные скорости вращения в шарнирах, а узлам 8, 9 – углы поворота в первом и втором шарнирах соответственно. Ветвям 10–13 соответствуют скалярные потоковые переменные – вращающие моменты приводов. ,
, – заданное значение угла поворота в сочленении (переменные
– заданное значение угла поворота в сочленении (переменные  в схеме);
в схеме); ).
). учтены моменты инерции механической части привода.
учтены моменты инерции механической части привода.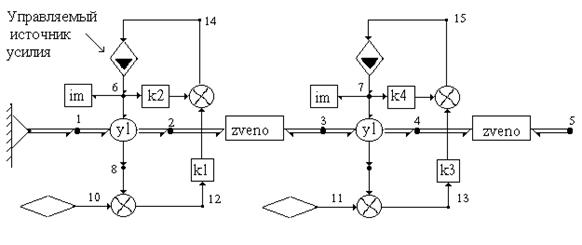
 и
и  на вращательных кинематических узлах, и информационные порты, служащие для соединения энергетической и сигнальной части. Блок привода играет ту же роль, что и управляемый источник на рис. 2.36. Схема управления вторым приводом свернута в подсистему.
на вращательных кинематических узлах, и информационные порты, служащие для соединения энергетической и сигнальной части. Блок привода играет ту же роль, что и управляемый источник на рис. 2.36. Схема управления вторым приводом свернута в подсистему.