Одним из достоинств ГС является возможность эквивалентных преобразований, позволяющих упростить граф.
Некоторые из этих преобразований приведены в табл. 2.3.
Первые две строки таблицы показывают, что можно исключить из графа узел с двумя связями при условии, что направление мощности в узле не меняется. Строки 3 и 4 иллюстрируют, что два связанных узла одного типа можно заменить одним. Следствием из этого свойства является возможность переставлять местами узлы одного типа вместе с их связями.
Менее очевидные эквивалентные преобразования, показанные в пятой и шестой строках таблицы, заменяют четырехугольник из 0-узлов и 1-узлов на два узла, заметно упрощая граф. В таблице показано только два варианта направления связей четырехугольника из многих, для которых такое преобразование имеет место.
Последние две строки таблицы демонстрируют изменение направления связей, которое может производиться одновременно для всех связей узла. Это свойство можно обобщить и на другие, более сложные структуры графа. Все указанные в табл. 2.3 эквивалентные преобразования легко доказываются с использованием уравнений (2.15) – (2.19).
Таблица 2.3
Исходный граф
Результат
.
Следует отметить, что направление любой связи в графе, кроме односвязных элементов и трансформаторов, может быть изменено на противоположное. Такое преобразование не является эквивалентным, но допустимо, так как соответствующее изменение знаков некоторых потоков и усилий бывает обычно безразличным.
Одно из важных эквивалентных преобразований, не приведенное в табл. 2.3, справедливо только для ГС электрических цепей. Оно состоит в исключении из графа одного из 0-узлов вместе со всеми его связями и объясняется линейной зависимостью уравнений суммирования потоков, записанных для всех 0-узлов. Это свойство следует из особенности электрических цепей, при расчетах которых тоже не записывается закон Кирхгофа для одного из узлов схемы.
Применим рассмотренные преобразования к графу, построенному на рис. 2.7, b.
Во-первых, исключим нижний 0-узел из графа. Оставшаяся его часть показана на рис. 2.8, а. Теперь в получившемся графе можно преобразовать «четырехугольник», а после этого исключить лишние 1-узлы в связях элементов , и . Результат преобразований приведен на рис. 2.8, b.
Рис. 2.8. Эквивалентные преобразования графа связей
Тот же результат может быть получен проще, если в исходном графе исключить другой 0-узел, а точнее – сразу два связанных 0-узла, разорвав, таким образом, одновременно два четырехугольника графа. В оставшемся графе (рис. 2.9) теперь достаточно изменить направление всех связей нижнего 0-узла и исключить лишние 1-узлы.
Несмотря на значительные «потери» в количестве связей, граф, полученный на рис. 2.8, b, полностью отражает все свойства исходной электрической схемы. Весьма интересное свойство ГС состоит в том, что каждый 0-узел соединяет графы параллельных частей схемы, а каждый 1-узел связывает модели последовательных участков. Поэтому 0-узел можно назвать узлом параллельного соединения, а 1-узел – узлом последовательного соединения. Для иллюстрации этого свойства на рис. 2.8, b штриховой линией обведены три части графа, связанные 0-узлом. Нетрудно убедиться в том, что этим частям в схеме действительно соответствуют параллельные цепи. Каждый 0-узел и 1-узел позволяет увидеть свой вариант топологии схемы.
Рис. 2.9. Другой вариант эквивалентных преобразований
Отмеченные интересные свойства узлов графа позволяют значительно сократить процедуру построения ГС электрических цепей. Во многих случаях, когда схема может быть представлена параллельно и последовательно соединенными компонентами, граф связей в конечном виде может быть построен сразу, без промежуточных этапов.
2.5. Моделирование механических систем на графах связей
При моделировании механических систем естественно интерпретировать усилие как силу в поступательном движении или момент силы во вращательном движении, а поток – как скорость (линейную или угловую . Тогда уравнение инерционности представляет собой не что иное, как второй закон Ньютона
, (2.21)
где – масса поступательно движущегося тела, или
, (2.22)
где – момент инерции тела.
Узел общего потока (1-узел) идеально подходит для того, чтобы отобразить принцип Даламбера: равенство нулю суммы всех внешних сил и силы инерции (рис. 2.10). Этот граф является, в сущности, моделью динамики тела с массой под действием суммы сил, которые могут быть как активными внешними силами, так и реакциями связей с другими телами механической системы.
Одновременно 1-узел можно использовать в качестве узла жесткого соединения твердых тел, при котором они, по существу, становится единым телом.
Действительно, 1-узел – это узел общего потока, что в принятой терминологии соответствует общей (равной) скорости для всех связей 1-узла, а равенство скоростей означает движение двух тел как единого целого. Два эквивалентных графа на рис. 2.11 иллюстрирует такую связь твердых тел с массами и .
Отметим, что граф, приведенный на рис. 2.11, а, наглядно демонстрирует также третий закон Ньютона о том, что действие равно противодействию. Действительно, сила действует на оба тела, но с противоположным знаком.
Рис. 2.11. Жесткое соединение тел
В противоположность 1-узлу узел общего усилия (0-узел) можно считать узлом свободного соединения твердых тел. На рис. 2.12 показано, что соединение двух тел через 0-узел позволяет каждому телу иметь свою скорость ( и соответственно). При этом третья связь 0-узла характеризует относительное движение тел:
. (2.23)
Поэтому 0-узел можно использовать при моделировании упругих связей и трения, которые появляются лишь при наличии относительного движения двух тел.
Рис. 2.12. Подвижное соединение тел
Рассмотрим физический смысл других элементов ГС, которые при моделировании механических систем связываются с 0-узлом.
Уравнение емкости для поступательного движения приобретает вид:
. (2.24)
Если его проинтегрировать, то можно получить привычную форму записи закона Гука
, (2.25)
где – жесткость пружины;
– податливость, т.е. величина, обратная жесткости;
– деформация пружины.
Учитывая свойства 0-узла, пружину можно представить графом, приведенным на рис. 2.13, а.
Как уже отмечалось выше, 0-узел необходим и для моделирования трения между двумя движущимися относительно друг друга твердыми телами (рис. 2.13, b). Уравнение элемента потерь при вязком трении может иметь вид
, (2.26)
где – коэффициент вязкого трения.
В общем случае зависимость силы трения от скорости может быть и нелинейной. Узел общего усилия с элементом потерь может отражать не только естественно существующее трение, но и специально вводимые в некоторые механизмы устройства: демпферы, амортизаторы.
Подобно упругости и трению моделируются в механических системах источники энергии (рис. 2.13, c). В большинстве случаев источник механического движения, воздействуя на некоторое тело, одновременно создает равное, но противоположное по знаку усилие на свою опору.
В относительном движении могут одновременно проявляться несколько эффектов. Например, при моделировании реальных пружин иногда требуется учитывать потери энергии за счет внутреннего трения в материале пружины. Граф пружины с внутренним трением можно представить параллельно соединенными моделями идеальной пружины и демпфера (рис. 2.13, d) или эквивалентным графом, который приведен на рис. 2.13, e. Очевидно, что элементы могут соединяться подобным образом в любых сочетаниях, кроме одновременного использования и .
Рис. 2.13. Подвижное соединение твердых тел: a – идеальная пружина; b – источник механической энергии; c – демпфер; d – пружина с внутренним трением
Рассмотрим моделирование поступательного движения трех вагонеток, из которых две, массой и , жестко связаны друг с другом, а между первой и второй вагонетками упруго-вязкая связь. В колесных парах присутствует трение . Вагонетки приводятся в движение человеком, который прикладывает к первой вагонетке силу .
Источник усилия в исходном графе подключен через 0-узел. В результате, человек прикладывает одно и то же усилие как к вагонетке, так и к опоре, в данном случае, например, к Земле. Величина силы трения в колесных парах пропорциональна разности между скоростью вагонетки и скоростью опоры.
Строго говоря, неподвижное основание тоже представляет собой твердое тело с очень большой массой и может быть представлено в графе 1-узлом с подключенной к нему инерционностью. Однако этот узел является узлом общего потока (скорости), принимаемого равным нулю. Поэтому связи с неподвижным основанием, а также все связи 1-узлов, соединенных с неподвижным основанием, имеют нулевую мощность и, следовательно, могут быть исключены из графа. Таким образом, граф, полученный после эквивалентных преобразований, приведен на рис. 2.14, с.
Свойство связей с неподвижным основанием в механических системах аналогично свойству связей с общей точкой (массой) в электрических системах. Различие состоит только в том, что в ГС электрической системы исключается 0-узел (узел общего нулевого потенциала). Получить полную аналогию можно было бы, применяя при моделировании механических систем дуальную интерпретацию: считать силу потоком, а скорость усилием. В этом случае инерционность в графах заменяется на емкость , 0-узлы на 1-узлы и наоборот. Однако вряд ли достоинства такого способа интерпретации оправдывают появляющиеся терминологические неудобства.
Рис. 2.14. Граф механической системы:
a – кинематическая схема; b – исходный граф; c – упрощенный граф
Приведенный на рис. 2.15 пример иллюстрирует моделирование вертикальных движений подвески автомобиля.
Рис. 2.15. Механическая система с поступательным перемещением
Граф связей приведен на рис. 2.15, b. Здесь предполагается, что источник усилия движется вместе с массой . Это может быть сила инерции, либо, например, реактивный двигатель. Как и в предыдущем примере, модель b включает неподвижное основание, а в модели c это основание исключено со всеми своими связями.
Еще один простой пример моделирования рычага представлен на рис. 2.16. Сила действует на массу , а та, в свою очередь, через рычаг приводит в движение массу . Обе массы движутся поступательно с трением. В данном случае рычаг моделируется с помощью элемента «Трансформатор».
Рис. 2.16. Кинематическая схема и граф рычага
Рассмотренная методика моделирования одномерного поступательного движения механических систем может быть без труда распространена и на системы с вращательным движением.
В этом случае роль силы играет момент силы , линейной скорости – угловая скорость , массы – момент инерции и т.д. В уравнениях (2.21)–(2.26) изменятся только обозначения и размерности переменных и констант.
Приведенный на рис. 2.17 пример иллюстрирует построение ГС для узла передачи вращательного движения, включающего одну ступень редуктора с зубчатыми колесами и упругие валы
Рис. 2.17. Механическая вращающаяся система
Способ моделирования зубчатого соединения в рассмотренном примере справедлив, если основание неподвижно.
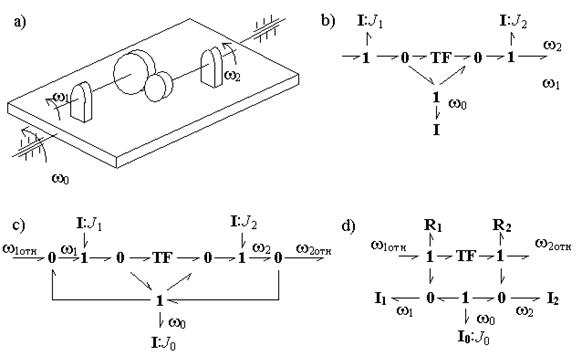
В случае, когда редуктор установлен на подвижном основании, как показано на рис. 2.18, а, ГС должен учитывать угловую скорость основания .
Рис. 2.18. Модель с подвижным основанием
Граф на рис. 2.18, b показывает связь между абсолютными скоростями w1 и w2, а граф на рис. 2.18, c – связь между скоростями колес зубчатого соединения , относительно основания. Последний граф можно преобразовать к более простому виду, приведенному на рис. 2.18, d. Здесь дополнительно учтено также трение в опорах валов.

 ,
,  и
и  . Результат преобразований приведен на рис. 2.8, b.
. Результат преобразований приведен на рис. 2.8, b.
 как силу
как силу  в поступательном движении или момент силы
в поступательном движении или момент силы  во вращательном движении, а поток
во вращательном движении, а поток  – как скорость (линейную
– как скорость (линейную  или угловую
или угловую  . Тогда уравнение инерционности представляет собой не что иное, как второй закон Ньютона
. Тогда уравнение инерционности представляет собой не что иное, как второй закон Ньютона , (2.21)
, (2.21) – масса поступательно движущегося тела, или
– масса поступательно движущегося тела, или , (2.22)
, (2.22) – момент инерции тела.
– момент инерции тела.
 и
и  .
. действует на оба тела, но с противоположным знаком.
действует на оба тела, но с противоположным знаком.
 и
и  соответственно). При этом третья связь 0-узла характеризует относительное движение тел:
соответственно). При этом третья связь 0-узла характеризует относительное движение тел: . (2.23)
. (2.23)
 . (2.24)
. (2.24) , (2.25)
, (2.25) – жесткость пружины;
– жесткость пружины; – податливость, т.е. величина, обратная жесткости;
– податливость, т.е. величина, обратная жесткости; – деформация пружины.
– деформация пружины. , (2.26)
, (2.26) – коэффициент вязкого трения.
– коэффициент вязкого трения. могут соединяться подобным образом в любых сочетаниях, кроме одновременного использования
могут соединяться подобным образом в любых сочетаниях, кроме одновременного использования  .
.
 , жестко связаны друг с другом, а между первой и второй вагонетками упруго-вязкая связь. В колесных парах присутствует трение
, жестко связаны друг с другом, а между первой и второй вагонетками упруго-вязкая связь. В колесных парах присутствует трение  . Вагонетки приводятся в движение человеком, который прикладывает к первой вагонетке силу
. Вагонетки приводятся в движение человеком, который прикладывает к первой вагонетке силу  в графах заменяется на емкость
в графах заменяется на емкость 
 .
.
 ,
,  относительно основания. Последний граф можно преобразовать к более простому виду, приведенному на рис. 2.18, d. Здесь дополнительно учтено также трение в опорах валов.
относительно основания. Последний граф можно преобразовать к более простому виду, приведенному на рис. 2.18, d. Здесь дополнительно учтено также трение в опорах валов.