Пренебрегая пульсацией выходного напряжения и потерями в ключах по сравнению с выходной мощностью записать энергетический баланс активных составляющих входной и выходной мощности в виде
,
где - среднее значение входного тока. Значение связано с параметрами схемы соотношением [ 9]
.
Из этих соотношений можно записать следующее выражение для
.
Из последнего выражения следует, что среднее значение при заданных параметрах схемы и нагрузки пропорционально частоте переключения тиристоров . Следовательно, для регулирования Uн можно использовать метод частотно-импульсного регулирования (ЧИР), обеспечивающий включение тиристоров по отклонению или .
Структурная функциональная схема такой системы регулирования представлена на рис. 5.7. В нее входят: датчик напряжения ДН, компаратор К, распределитель управляющих импульсов РИ, формирователи импульсов управления тиристорами ФИ. Основным узлом является генератор частоты управляемый напряжением (ГУН). В качестве последнего можно использовать управляемые мультивибраторы, генераторы на дискретных ОУ, специализированные ИМС и цифровые логические микросхемы.
Рис. 5.7
Принципиальная электрическая схема ГУН на базе ОУ представлена на рис. 5.8 [18]. Частота импульсов на выходе ДА1.3 определяется по формуле
,
где –напряжение на входе ГУН;
–напряжение стабилизации VD1, задающее уровень выходного напряжения ГУН.
Рис. 5.8
В качестве ГУН можно использовать специализированную микросхему К1108ПП1, представляющую собой прецизионный преобразователь напряжение-частота. В справочной литературе приведена схема включения микросхемы в режиме преобразования входного напряжения В в частоту, изменяющуюся в диапазоне кГц, а также рекомендации по расчету внешних элементов, используемых для этой цели.
Микросхема К531ГГ1 представляет собой генератор, частота которого управляется напряжением [19]. Она содержит два мультивибратора–автогенератора, каждый из которых имеет входы управления частотой и диапазоном ее изменения. На выходе мультивибратора создается меандр, частота которого может изменяться в диапазоне от 1 Гц до 60 МГц.
Структурно–функциональная схема К531ГГ1 приведена на рисунке 5.9. Базовая частота импульсов задается конденсатором, подключенным к выводам С и определяется соотношением = / С
Характеристики управления частотой ГУН представлены на рис. 5.10. Из них видно, что изменяя напряжение Uд на входах управления Д1 (Д2), можно изменять диапазон регулирования частоты генератора.
Рис. 5.9 Рис 5.10
Однако, для приведенных микросхем ГУН характеристика управления такова, что при увеличении напряжения управления Uупр,возрастает и частота генерируемых импульсов. Для проектируемого регулятора эта зависимость должна быть обратной. В связи с этим, в схему управления регулятором должен быть включен преобразователь, который выделяет отклонение реального значения от номинального значения. Эту функцию может выполнять ОУ, на один вход которого подается опорное напряжение, а на другой – контролируемое, снимаемое с резистивного делителя напряжения. Коэффициенты передачи по входам ОУ выбираются таким образом, чтобы для номинального значения контролируемого напряжения выходное напряжение ОУ, подаваемое на управляющий вход ГУН, обеспечивало требуемую частоту , находящуюся в средней части выбранной характеристики управления ГУН. Таким образом будет обеспечен требуемый диапазон изменения частоты импульсов управления тиристорами.
Один из вариантов схемы управления регулятором, построенный на базе ИМС К531ГГ1, представлен на рис. 5.11.
Рис.5.11
Делитель на резисторах R1 и R2 является датчиком входного напряжения. На ОУ (ДА1) выполнен преобразователь, управляющий микросхемой К531ГГ1 (ДД1). Функцию распределителя управляющих импульсов выполняет триггер (ДД2), а их длительность задается формирователями (ДД3.1 и ДД3.2). Выбор схемы выходного импульсного усилителя для управления тиристорами и расчет её элементов описан в разделе 3.

 ,
, - среднее значение входного тока. Значение
- среднее значение входного тока. Значение  связано с параметрами схемы соотношением [ 9]
связано с параметрами схемы соотношением [ 9] .
.
 .
. при заданных параметрах схемы и нагрузки пропорционально частоте переключения тиристоров
при заданных параметрах схемы и нагрузки пропорционально частоте переключения тиристоров  . Следовательно, для регулирования Uн можно использовать метод частотно-импульсного регулирования (ЧИР), обеспечивающий включение тиристоров по отклонению
. Следовательно, для регулирования Uн можно использовать метод частотно-импульсного регулирования (ЧИР), обеспечивающий включение тиристоров по отклонению  или
или  .
.
 ,
, –напряжение на входе ГУН;
–напряжение на входе ГУН; –напряжение стабилизации VD1, задающее уровень выходного напряжения ГУН.
–напряжение стабилизации VD1, задающее уровень выходного напряжения ГУН.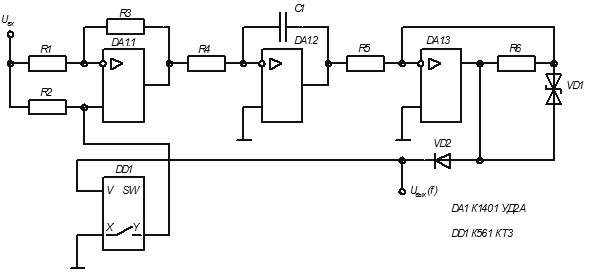 Рис. 5.8
Рис. 5.8 В в частоту, изменяющуюся в диапазоне
В в частоту, изменяющуюся в диапазоне  кГц, а также рекомендации по расчету внешних элементов, используемых для этой цели.
кГц, а также рекомендации по расчету внешних элементов, используемых для этой цели. задается конденсатором, подключенным к выводам С
задается конденсатором, подключенным к выводам С  и определяется соотношением
и определяется соотношением  / С
/ С 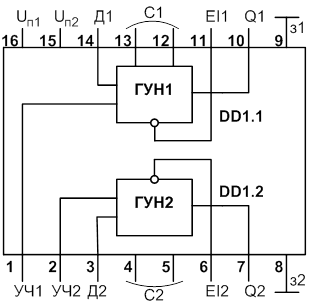

 , находящуюся в средней части выбранной характеристики управления ГУН. Таким образом будет обеспечен требуемый диапазон изменения частоты импульсов управления тиристорами.
, находящуюся в средней части выбранной характеристики управления ГУН. Таким образом будет обеспечен требуемый диапазон изменения частоты импульсов управления тиристорами. Рис.5.11
Рис.5.11