Для анализа переходных процессов в приводах с асинхронным двигателем до сих пор использовались его статические характеристики. При этом предполагалось, что каждому значению угловой скорости соответствуют строго определенные значения токов, зависящие от параметров обмоток, частоты напряжения и его значения на выводах двигателя. Из этого предположения следует, что при подключении двигателя к сети в его обмотках мгновенно возникают токи, определяющие также мгновенное появление электромагнитного момента, причем ток и момент могут быть рассчитаны по формулам, соответствующим схеме замещения асинхронного двигателя. Такой подход к анализу переходных режимов является упрощенным, поскольку он исключает из рассмотрения электромагнитные переходные процессы.
Рис. 12.4 Статическая и динамическая характеристики асинхронного двигателя
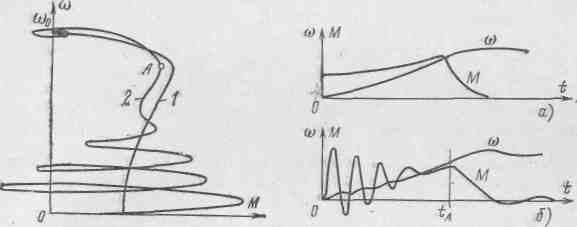
Рис. 12.5 Графики момента и угловой скорости при пуске асинхронного двигателя
Асинхронная машина представляет собой сложную систему магнитно-связанных контуров (фазных обмоток), расположенных на статоре и роторе, причем взаимоиндуктивность между отдельными контурами при вращении ротора изменяется. При подключении к сети переменного тока такой сложной цепи в ее контурах возникают переходные токи, которые могут существенно отличаться от их установившихся значений. Отметим, что каждая точка механической характеристики асинхронного двигателя (кривая 1 на рис. 12.4) соответствует установившимся для данной угловой скорости значениям токов в обмотках статора и ротора.
Если теперь, пользуясь статической механической характеристикой, построить, например, процесс пуска двигателя, то графики изменения угловой скорости и момента во времени будут иметь вид,, аналогичный приведенным на рис. 12.5, а. Однако эти графики не будут соответствовать реальным изменениям переменных при переходном процессе, так как для данной угловой скорости ротора переходные токи отличаются от соответствующих установившихся значений. Следовательно, электромагнитный момент двигателя в переходном процессе также будет отличаться от своего установившегося значения, определяемого по кривой 1 для соответствующей углевой скорости.
На рис. 12.5, б приведены примерные графики изменения момента и угловой скорости при пуске двигателя с учетом электромагнитных переходных процессов. Если по графикам рис. 12.5, б построить зависимость ω=f(М), то она будет иметь вид кривой 2, изображенной на рис. 12.4. Характеристика 2 на рис. 12.4 называется динамической механической характеристикой. Каждая точка последней соответствует определенному моменту времени переходного процесса. Так, точка О динамической механической характеристики пуска двигателя соответствует началу переходного процесса, точка А на рис. 12.4 — времени tA на рис. 12.5, б, а точка ω0 — окончанию переходного процесса на рис. 12.5, б, причем это время теоретически равно бесконечности.
В отличие от статической механической характеристики динамическая характеристика (фактически это фазовая траектория переходного процесса) определяется не только параметрами обмоток двигателя, но и параметрами системы электропривода (момент инерции, статический момент), а также видом переходного процесса (пуск, реверс и т. п.). При изменении последних изменяется характер переходных токов, а следовательно, и переходных моментов, что влечет за собой изменение динамической механической характеристики. Следовательно, асинхронный двигатель при данных напряжении сети и параметрах обмоток обладает одной статической и множеством динамических механических характеристик (фазовых траекторий переходных процессов).
Рассматривая начальные участки графиков электромагнитного момента, приведенных на рис. 12.5, а и б, отметим, что максимальное значение переходного момента существенно, в несколько раз, превышает пусковой момент. Это объясняется тем, что максимальные значения переходных токов могут значительно превысить амплитуду пусковых токов двигателя. Поля, образуемые свободными токами, могут либо усиливать, либо ослаблять основное поле, создаваемое принужденными, т. е. установившимися, токами, вызывая соответствующее увеличение или уменьшение переходного электромагнитного момента. Иногда значение момента может быть даже отрицательным (рис. 12.5, б) на начальном участке переходного процесса. Как видно из рис. 12.5, б, изменение электромагнитного момента асинхронного двигателя носит характер затухающих колебаний со значительными амплитудами на начальном участке переходного процесса.
Детальное изучение электромагнитных переходных процессов в асинхронном двигателе при пуске с полным напряжением показывает, что колебания момента практически полностью затухают к моменту достижения угловой скоростью значения, соответствующего критическому скольжению на статической механической характеристике. При дальнейшем увеличении угловой скорости двигателя электромагнитные переходные процессы проявляются следующим образом. При скольжении двигателя, меньшем критического, ток в обмотке ротора машины, определяемый по статической характеристике (рис. 12.6), резко изменяется с изменением угловой скорости. Однако из-за влияния индуктивности обмоток машины ток ротора не успевает измениться так, как это следует из зависимости ω=f(I2) (рис. 12.6). Очевидно, чем больше жесткость рабочего участка статической механической характеристики и чем меньше момент инерции ротора двигателя, тем в большей степени изменение токов будет отставать от изменения угловой скорости. В результате влияния этих факторов при синхронной угловой скорости двигателя токи ротора могут быть не равны 0, поэтому соответственно момент двигателя не равен 0, и ротор разгоняется до угловой скорости, превышающей синхронную. Далее, токи ротора уменьшаются, уменьшается момент, развиваемый двигателем, а значит, уменьшается угловая скорость и т. д. Поэтому в конце переходного процесса пуска изменения угловой скорости и момента двигателя имеют затухающий колебательный характер. Чем мягче рабочий участок статической механической характеристики и чем больше момент инерции ротора, тем меньше амплитуда этих колебаний и тем быстрее они затухают. Практически колебания угловой скорости и момента двигателя в конце переходного процесса пуска наблюдаются не всегда.
Итак, анализ электромагнитных переходных процессов на примере пуска двигателя показывает, что в начале переходного процесса момент двигателя определяется переходными токами, обусловленными в основном коммутационными операциями, а в конце переходного процесса зависимость М(t) определяется соотношением механической инерции ротора (момент инерции ротора) и электромагнитной инерции, связанной с индуктивностями обмоток асинхронной машины.
Изучение электромагнитных переходных процессов в асинхронном двигателе имеет теоретическое и практическое значение, поскольку, как показано выше, исключение из рассмотрения их влияния искажает действительное представление о характере переходных процессов в асинхронном электроприводе. Исследования показывают, что максимальные значения переходного момента могут существенно превысить номинальный момент двигателя: при пуске в 2—4 раза, при реверсировании в 8—15 раз, что следует учитывать при анализе свойств конкретного электропривода.



 Следовательно, электромагнитный момент двигателя в переходном процессе также будет отличаться от своего установившегося значения, определяемого по кривой 1 для соответствующей углевой скорости.
Следовательно, электромагнитный момент двигателя в переходном процессе также будет отличаться от своего установившегося значения, определяемого по кривой 1 для соответствующей углевой скорости.