1. Переходные режимы в приводах с асинхронными двигателями трехфазного тока.
1. Переходные режимы в приводах с асинхронными двигателями трехфазного тока
При исследовании переходных режимов в приводах с асинхронными двигателями в первом приближении пренебрегаем электромагнитными процессами, так как они протекают значительно быстрее электромеханических процессов.
Пуск асинхронного двигателя с короткозамкнутым ротором небольшой и средней мощности обычно осуществляется при полном напряжении (прямой пуск).
Иногда пуск двигателей с короткозамкнутым ротором с целью ограничения тока или момента осуществляется при напряжении, пониженном с помощью дополнительных резисторов или реакторов, включенных в цепь статора, или же посредством тиристорного регулятора напряжения.
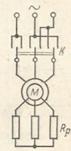
Пуск двигателей с фазным ротором осуществляется посредством пускового резистора Rр, включаемого в цепь ротора двигателя. Число пусковых ступеней резистора и величина их сопротивлений определяются условиями пуска электропривода.
Если для упрощения принять, что двигатель разгоняется без нагрузки (Mc=0) в одну пусковую ступень или напрямую, и учесть, что момент, развиваемый двигателем,
то уравнение движения привода запишется так:
Из предыдущего известно, что ω=ω0(1-s) и, следовательно,
тогда
После разделения переменных
или
где - электромеханическая постоянная времени.
Рис.7.26.Принципиальная схема пуска асинхронного двигателя
Рис. 7.27. Кривые ω/ω0=f(t/Tм) при пуске асинхронного двигателя для различных значений sk.
Электромеханическая постоянная времени в данном случае — это время, в течение которого привод с моментом инерции J разгонится до синхронной угловой скорости ω0 под действием момента, равного максимальному Мк.
Из (7.60) получаем время пуска двигателя
При пуске двигателя из неподвижного состояния (sнач=1)
Если принять, что s=0, то tп=∞. Практически можно считать пуск закончившимся тогда, когда значение скольжения будет отличаться не больше чем на 0,05 его установившегося значения. Тогда время пуска без нагрузки
Пренебрегая в первом члене значением 0,052 (по сравнению с 1), получаем в относительных величинах
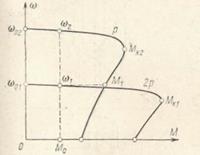
Следовательно, относительное время пуска зависит от значения sK (рис. 7.27), которое пропорционально сопротивлению цепи ротора.
Пользуясь (7.63), можно установить, что время пуска имеет минимальное значение
при sk=0,407.
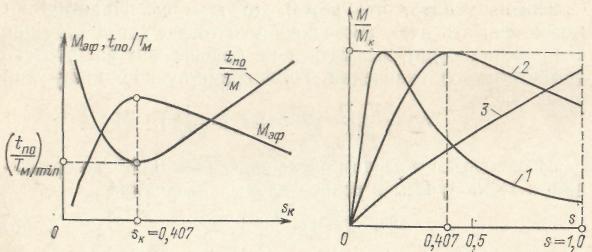
Минимальное время пуска при прочих равных условиях определяется наибольшим эффективным значением момента двигателя за период пуска. Это значение эффективного момента соответствует, очевидно, наибольшей площади (рис. 7.29), ограниченной кривой М = f(s). Под эффективным моментом понимается такой постоянный момент, при котором время пуска при прочих равных условиях одинаково с временем пуска при фактическом моменте.
Время пуска без нагрузки (Мс = 0) может быть определено через значение эффективного момента по формуле
Отсюда значение эффективного момента при пуске
Если в эту формулу подставить значение tп0 из (7.63), то после преобразований получим:
По (7.64) (см. рис. 7.28) построена зависимость Мэф=f(sK). Эффективный момент при пуске имеет максимальное значение при sK = 0,407 и равен 0,81 Мк. На рис. 7.29 кривая 2 отвечает этому случаю. Максимальное значение эффективного момента Мэф (см. рис. 7.28) соответствует минимальному времени пуска двигателя.
Рис.7.28. Зависимости Мэф и tп0/Тм от sk.
Рис.7.29. Зависимости М/Мк=f(s) при различных значениях sk. 1 – sk < 0,407; 2 – sk = 0,407; 3 – sk > 1.
Ступенчатый пуск двухскоростных и многоскоростных двигателей производится вначале присоединением к сети обмоток статора так, чтобы получить наибольшее число полюсов. Затем, по достижении двигателем установившейся угловой скорости, соответствующей этому числу полюсов, его обмотки переключаются на меньшее число полюсов, при этом двигатель вновь ускоряется, разгоняясь до большей угловой скорости.
На рис. 7.30 показаны механические характеристики двухскоростного асинхронного двигателя. Вначале двигатель соответственно характеристике, отвечающей числу пар полюсов 2р, разгоняется до угловой скорости ω1 при моменте нагрузки Мс, после чего происходит переключение на число пар полюсов р, и с начальным моментом М1 двигатель начинает разгоняться до угловой скорости ω2.
Кривая изменения угловой скорости от времени может быть построена по (7.62) для первой ступени в предположении, что скольжение изменяется от 1 до 0,05, Тм=Тм1=Jω01/MKl, sK = sKl. Расчет кривой угловой скорости для второй ступени производится по той же формуле, однако начальным скольжением будет 0,5, а конечным 0,05; кроме того, Тм = Тм2 = Jω02/Mк2 и sK = sK2.
Полное время пуска равно сумме времен разгона на первой и второй ступенях. Для рассмотренного случая время ступенчатого пуска окажется меньшим, чем время разгона в одну ступень до той же наибольшей угловой скорости. Аналогично производится построение кривой изменения угловой скорости во времени при другом числе пар полюсов двигателя.
Рис.7.30. Характеристики двухскоростного асинхронного двигателя при двухступенчатом пуске.
Торможение противовключением и реверсирование асинхронного двигателя осуществляются переключением двух фаз статора (рис. 7.31). Характеристики ω=f(М), иллюстрирующие переход из двигательного режима в режим противовключения, показаны на рис. 7.32.
Кривая 1 соответствует торможению, когда ротор замкнут накоротко, кривые 2 и 3 — условию, что в цепи ротора включены резисторы с сопротивлением соответственно Rp2<Rp3.
При Мс = 0 и с учетом того, что при противовключении s = (ω0 + ω)/ ω 0, уравнение движения привода примет вид:
После преобразований можно получить в общем виде для времени торможения такое же выражение, как и (7.61).
Учитывая, что торможение происходит в пределах скольжений от sнач = 2 до sкон = 1, получаем:
Аналогично случаю пуска время торможения противовключением имеет минимальное значение
Рис. 7.32. Характеристики асинхронного двигателя ω=f(М) при переключении из двигательного режима на торможение противовключением.
На рис. 7.32 характеристика 3 соответствует случаю, когда sK = 1,47 и эффективное значение тормозного момента имеет наибольшее значение. Аналогично предыдущему может быть найдено эффективное значение момента при торможении противовключением
Если sK = 1,47, то эффективный момент имеет максимальное значение при торможении Мэф.т.max= 0,98 Мк.
Зная значение эффективного момента при пуске или при торможении противовключением, можно в случае постоянства момента сопротивления Мс определить время пуска или торможения под нагрузкой:
В (7.67) знак минус относится к режиму пуска двигателя, знак плюс к режиму торможения. Время реверсирования можно рассматривать как сумму времен торможения противовключением и разбега в обратном направлении.
Динамическое торможение осуществляется чаще всего при переключении на ходу обмотки статора от источника переменного тока на источник Постоянного тока (рис. 7.33).
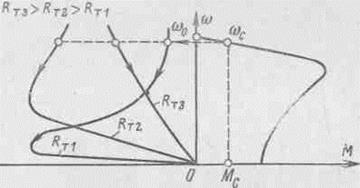
Соответствующие характеристики динамического торможения получаются при введении резисторов Rт в цепь ротора (рис. 7.34). Характеристика Rт1 относится к случаю, когда сопротивление резисторов Rт = 0.
Для ограничения постоянного тока вводится дополнительный резистор Rд.т.
Рис. 7.34. Характеристики асинхронного двигателя ω = f(М) при переключении из двигательного режима на динамическое торможение
Если торможение производится без нагрузки, то уравнение движения запишется следующим образом:
После преобразований, принимая во внимание, что s = ω/ω0, получаем время торможения
Когда sнач=1,0, а sкон=0,05, формулу (7.69) можно представить в виде
где Тм=Jω0/Mк.т - электромеханическая постоянная времени при динамическом торможении.
Так как формула (7.70) аналогична (7.63) для времени пуска асинхронного двигателя без нагрузки, то значение эффективного момента двигателя при динамическом торможении может быть найдено по формуле, аналогичной (7.64).
Очевидно, что минимальное время торможения, так же как и при пуске, соответствует sк.т=0,407.
Рекуперативное торможение асинхронного двигателя возможно, если угловая скорость его оказывается выше синхронной. Этот способ торможения может быть осуществлен при управлении, например, двух- или многоскоростными двигателями в случае переключения обмоток статора работающего двигателя с меньшего числа полюсов на большее. Построив механическую характеристику двигателя в генераторном режиме работы параллельно с сетью и определив из нее максимальный момент и критическое скольжение, подсчитав электромеханическую постоянную времени для данного случая и задавшись пределами изменения скольжения, можно аналогично предыдущему построить кривую зависимости угловой скорости от времени и определить время торможения.
Торможение двух- или многоскоростного двигателя может быть ступенчатым - вначале рекуперативным, а затем торможением противовключением (или динамическим торможением).
Рис.7.35. Характеристики ступенчатого торможения двухскоростного асинхронного двигателя.
На рис. 7.35 показан процесс двухступенчатого торможения двухскоростного двигателя.
Если не учитывать время коммутации аппаратов управления, то можно считать, что время торможения при ступенчатом торможении существенно меньше, чем при торможении в одну ступень, за счет увеличения эффективного тормозного момента.
В случае использования четырехскоростного двигателя можно осуществить рекуперативное торможение в три ступени; на последней, четвертой ступени торможения осуществляется противовключение при наибольшем числе полюсов статорной обмотки. Плавное рекуперативное торможение осуществляется при частотном управлении асинхронным двигателем в случае, если преобразователь частоты обладает двусторонней проводимостью.





 - электромеханическая постоянная времени.
- электромеханическая постоянная времени.