4.6.1 Ведомый вал
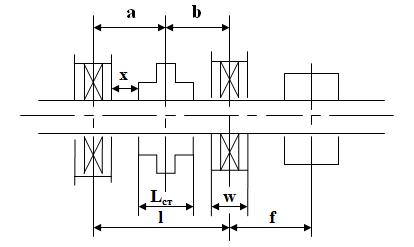
Рис.5 Схема ведомого вала.
a - расстояние от колеса до опоры.
Lст - длина ступицы колеса.
f- расстояние от муфты до опоры.
l- расстояние между опорами.
х - зазор между колесом и внутренней стенкой корпуса.
х=10мм. w-толщина стенки корпуса в месте опоры.
По таблице 14.9.стр.302 [1] согласно Т2 =120,87 H×м. принимаем f=60 мм, w=30 мм.
4.6.2. Расстояние между опорами определим по формуле 14.3, стр.291 [1]
l=2(Lст +2х+w/2),
где Lст »2b,b-длина зуба, при b=42 мм.
Lст »2×42=84мм.
Тогда
l=2(84+2×10+30/2)=238 мм.
4.6.3. Определим значение расстояний a и b.
a=l/2-Lст /2
a=238/2-84/2=77 мм.
b=l-a
b=238-77=161мм.
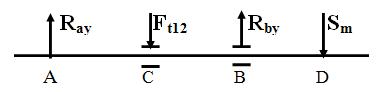
4.6.4. Опорные реакции в вертикальной плоскости. Действие силыSm задаем в вертикальной плоскости.
а) Рассмотрим сумму моментов относительно точки А.
SMa =Ft12 *b-Rby *I+Sm (f+I)=0
Rby = (Ft12 *b+Sm (f+I))/l
Rby =(1090,55*161+327,165*298)/238=1147,37 H.
б) Рассмотрим сумму моментов относительно точки В.
SMB =Ray *I+Sm *f-Ft12 *a =0
Ray =( Ft12 *a- Sm *f)/l
Ray =(1090,55*77-327,165*60)/238=270,346 H
в) Проверка: Рассмотрим сумму проекции сил на ось Y.
SFy =Ray -Ft12 +Rby -Sm =0
SFy =270,346-1090,55+1147,37-327,165=0
4.6.5. Изгибающие моменты в вертикальной плоскости.
а) Изгибающий момент относительно точки А.
Мизг(А) =0
б) Изгибающий момент относительно точки С.
-Ray ×a+Мизг ( С ) =0
Мизг (C) =Ray ×a
Мизг( C ) =270,346*0.077=20,8 H×м.
в) Изгибающий момент относительно точки В.
-Ray ×(a+b)+Ft12 ×b=Mизг (B) =0
Мизг (B) =Ray ×(a+b)-Ft12 ×b
Мизг( B ) =270,346*(0.077+0.161)-1090,55*0.161 = - 111,24 H×м.
г) Проверка: Изгибающий момент относительно точки D.
-Ray ×(a+b+f)+Ft12 (b+f)-Rby ×f+Мизг (D) =0
Мизг (D) =Ray (a+b+f)-Ft12 (а+f)+Rby ×f
Мизг( D ) =270,346*0.298-1090,55*0.137+1147,37*0.060 = 0
4.6.6.Эпюра изгибающих моментов в вертикальной плоскости.
20,8
B
A C D
-111,24
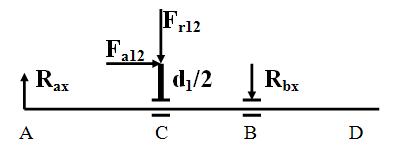
4.6.7 Опорные реакции в горизонтальной плоскости.
а) Рассмотрим сумму моментов относительно точки А.
SМA =Rbx ×(a+b)-Fr12 ×a-Fa12 ×d2 /2 =0
Rbx =(Fr12 ×a+Fa12 ×d2 /2)/(a+b)
Rbx =(109,4*77+381,55*273/2)/238=254,22 Н.
б) Рассмотрим сумму моментов относительно точки В.
SМB =-Rax ×(a+b)-Fa12 ×d2 /2+Fr12 ×b=0
Rax =(Fr12 ×b-Fa12 ×d2 /2)/(a+b)
Rax =(109,4×161-381,55*273/2)/238= -144,82 Н.
в) Проверка: Рассмотрим сумму проекций сил на ось Х.
SFx =Rax -Fr12 +Rbx =0
SFx =-144,82-109,4+254,22=0
4.6.8. Изгибающие моменты в вертикальной плоскости.
а) Изгибающий момент относительно точки А.
Мизг( A ) =0
б) Изгибающий момент относительно точки С.
1) -Rax ×a+Мизг(C)1 =0
Мизг(C)1 =Rax ×a
Мизг(C)1 =-144,82*0.077=-11,15 H×м.
2) -Rax ×a-Fa12 ×d2 /2+Мизг(C)2 =0
Мизг(C)2 =Rax ×a+Fa12 ×d2 /2
Мизг( C )2 =-144,82*0,077+381,55*0.273/2=40,93 H×м.
г) Проверка: Изгибающий момент относительно точки B.
-Rax ×(a+b)-Fa12 ×d2 /2+Fr12 ×b+Мизг (B) =0
Мизг (B) = Rax ×(a+b)+Fa12 ×d2 /2-Fr12 ×b
Мизг( B ) =-144,82*0,238 +381,55*0,273 /2-109,4*0,161=0
4.6.9. Эпюра изгибающих моментов в горизонтальной плоскости
40,93
A C B D
-11,15
4.6.10. Эпюра крутящего момента ведомого вала.
A C B D
4.6.11 Определим суммарный изгибающий момент в наиболее нагруженном сечении.
а) МS изг относительно точки A.
б) МS изг относительно точки C.
1)
2)
в) МS изг относительно точки В.
4.6.12 Эпюра суммарных изгибающих моментов ведомого вала.
111,24
45,91
23,6
A C B D
4.6.13. Определим эквивалентный момент по 3-ей гипотезе прочности.
4.6.14. Определим диаметр вала под колесом.
где [s-1 ]и =60МПа.
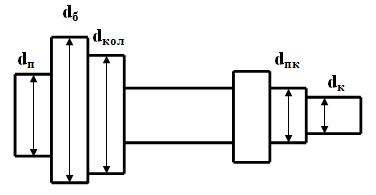
Учитывая ослабление сечения шпоночной канавкой, увеличиваем расчетный диаметр на 3-5% и принимаем по ГОСТ 6636-69 стр.54,[3]. dкол =38 мм.
4.6.15. Определяем диаметр выходного конца вала (то есть под муфтой)-dк
где [t]=20МПа.
Аналогично из-за шпоночной канавки увеличиваем диаметр и принимаем по ГОСТ 6636-69,стр.54,[3], dк =34мм.
4.6.16.Диаметры цапф под подшипниками должны быть несколько больше dк =34 мм и должны быть кратны 5. Принимаем dп =35мм.
4.6.17.Диаметр участка вала между выходным концом и цапфой под подшипник должен иметь диаметр немного меньше, чем диаметр внутреннего кольца подшипника для его свободного прохода.
Принимаем dпк =33мм.
4.6.18. Диаметр буртика должен быть больше диаметра под шестерней на две высоты заплечников 2h=8мм. см. табл.14.7.стр.302,[1].
Принимаем dб =41мм.
Рис.6 Основные размеры ведомого вала.