Для математического описания системы в подклассе ss необходимо выбрать координаты состояния из пятерки уравнений, записанных в пункте 3.
После выбора координат состояния переходят к записи уравнений состояния системы.
По этим уравнениям записывают четверку матриц (А, В, С, D), входящих в подкласс ss.
Для составления матрицы С выбирают наблюдаемые переменные.
Матрица D называется дополнительной и содержит компоненты наблюдаемых координат, получаемых из внешних возмущений, поэтому в данном случае она равна 0.
Результатом выполнения оператора eig является вывод собственных значений характеристического уравнения системы, по которым можно дать первоначальную оценку о колебательности системы. Если среди собственных значений системы имеются комплексные значения, то действительная их часть указывает на степень затухания, а мнимая на частоту затухания колебаний.
Результатом выполнения оператора damp является вывод собственных значений характеристического уравнения системы, коэффициента демпфирования системы и частоты колебаний системы по которым можно дать более полную оценку о колебательности системы.
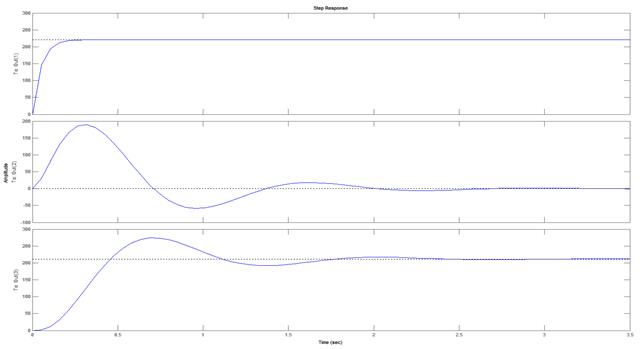
Результатом выполнения оператора step является вывод графика реакции системы на ступенчатое воздействие.
Математическое описание системы выполняется в подклассе ss. Определяются частоты колебаний и степень демпфирования (оператор damp), получаются кривые переходных процессов (оператор step) для системы тиристорный преобразователь – двигатель (Т-Д), отсоединенной от исполнительного механизма.
Выбор уравнений необходимых для описания системы:
1.
2.
3.
Выбор координат состояния:
1.
2.
3.
Составление уравнений состояний системы:
1.
2.
3.
Составление матриц А, В, С, D :
, , ,
Запись матриц А, В, С, D в числовой форме в подклассе ss:
Математическое описание системы выполняется в подклассе ss. Определяются частоты колебаний и степень демпфирования (оператор damp), получаются кривые переходных процессов (оператор step) для механизма, отсоединенного от электропривода.
Выбор уравнений необходимых для описания системы:
1.
2.
3.
Выбор координат состояния:
1.
2.
3.
Составление уравнений состояний системы:
1.
2.
3.
Составление матриц А, В, С, D :
, , , D = 0
Запись матриц А, В, С, D в числовой форме в подклассе ss:
Математическое описание системы выполняется в подклассе ss. Определяются частоты колебаний и степень демпфирования (оператор damp), получаются кривые переходных процессов (оператор step) для полной двухмассовой электромеханической системы.
Выбор уравнений необходимых для описания системы:
1.
2.
3.
4.
5.
Выбор координат состояния:
1.
2.
3.
4.
5.
Составление уравнений состояний системы:
1.
2.
3.
4.
5.
Составление матриц А, В, С :
, ,
Запись матриц А, В, С в числовой форме в подклассе ss:
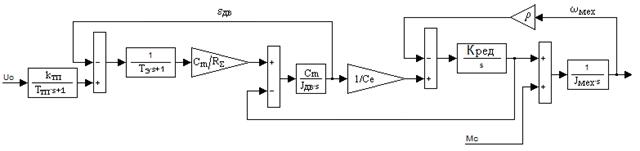
6. Общий вид структурной схемы двухмассовой электромеханической системы с передаточными функциями:
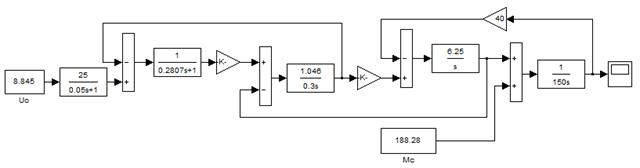
И с числовыми коэффициентами:
По результатам моделирования пунктов 5.1, 5.2, 5.3 видно, что система тиристорный преобразователь – двигатель (Т-Д), отсоединенной от исполнительного механизма является устойчивой.
Механизм, отсоединенный от электропривода, находится на границе устойчивости, что выражается в незатухающих синусоидальных колебаниях постоянной амплитуды.
Полная двухмассовая электромеханическая система является устойчивой, хотя и имеет несколько возросшую частоту колебаний, что связано с учетом исполнительного механизма.
Вывод:
В данном разделе проведен анализ для двигателя постоянного тока независимого возбуждения с якорным управлением по схеме тиристорный преобразователь – двигатель. Выполнено исследование электромеханической системы с использованием пакета Control System Toolbox.Составлено математическое описание системы. Определены частоты колебаний и степень демпфирования, получены кривые переходных процессов для вариантов:
· В системе тиристорный преобразователь – двигатель (Т-Д), отсоединенной от исполнительного механизма.
· В механизме, отсоединенном от электропривода.
· В полной двухмассовой электромеханической системе.
В результате было определено, что данная система является устойчивой.









 ,
,  ,
,  ,
, 








 ,
,  ,
,  , D = 0
, D = 0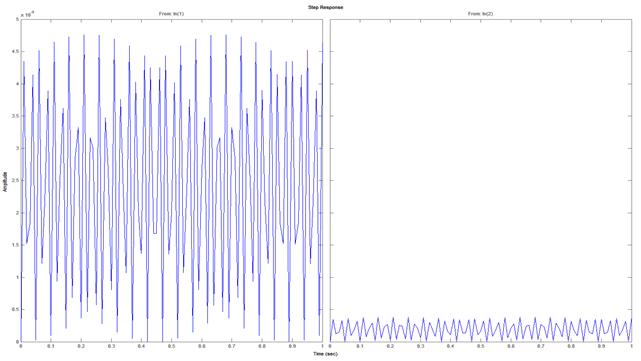







 ,
,  ,
,