Нормой матрицы назовем поставленное в соответствие этой матрице вещественное число ||A|| такое, что которое как вещественное число ставится в соответствие каждой матрице из n-мерного пространства и удовлетворяет 4 аксиомам:
1. ||A||³0 и ||A||=0, только если A – нулевая матрица;
Норма матриц может быть введена различными способами. Матрицу A можно рассматривать как n2-мерный вектор.
.
Эта норма называется евклидовой нормой матрицы.
Если для любой квадратной матрицы A и любого вектора x, размерность которого равна порядку матрицы, выполняется неравенство ||Ax||£||A||·||x||,
то говорят, что норма матрицы A согласована с нормой вектора. Заметим, что слева в последнем условии стоит норма вектора (Ax – вектор).
С заданной векторной нормой согласованы различные матричные нормы. Выберем среди них наименьшую. Таковой будет
.
Эта матричная норма- подчиненная заданной векторной норме. Существование максимума в этом выражении следует из непрерывности нормы, ибо всегда существует вектор x -> ||x||=1 и ||Ax||=||A||.
Покажем, xто норма N(A) не подчинена ни одной векторной норме. Нормы матрицы, подчиненные ранее введенным векторным нормам, выражаются следующим образом:
1. ||A||¥= |aij| (норма-максимум)
2. ||A||1= |aij| (норма-сумма)
3. ||A||2= , (спектральная норма)
где s1-наибольшое собств значение симметричной матрицы A¢A, являющейся произведением транспонированной и исходной матриц. Т к матрица A¢A симметричная, то все ее собственные значения вещественны и положительны. Число l -собств значение, а ненулевой вектор x – собственный вектор матрицы A(если они связаны между собой соотношением Ax=lx). Если же матрица A сама является симметричной, A¢ = A, то A¢A = A2 и тогда s1 = , где - наибольшее по модулю собственное значение матрицы A. Следовательно, в этом случае мы имеем = .
Собственные числа матрицы не превышают любой из ее согласованных норм. Нормируя определяющее собственные числа соотношение, получим ||λx||=||Ax||, |λ|·||x||=||Ax||£||A||·||x||, |λ|£||A||
Поскольку справедливо ||A||2£||A||e, где евклидова норма вычисляется просто, в оценках вместо спектральной нормы можно использовать евклидову норму матрицы.
30.Обусловленность систем уравнений. Коэффициент обусловленности.
Степень обусловленности - влияние решения на исходные данные. Ax = b : вектору b соответствует решение x. Пусть b изменится на величину . Тогда вектору b+ будет соответствовать новое решение x+: A(x+) = b+ . Так как система линейна, то Ax + A= b+ , тогда A= ; = ; = ; b = Ax; = тогда ; * , где - относительная погрешность возмущения решения, – коэффициент обусловленности cond(A) (во сколько раз может возрасти погрешность решения), – относительное возмущение вектора b. cond(A) = ; cond(A)* Свойства коэффициента: зависит от выбора нормы матрицы; cond(= cond(A); умножение матрицы на число не влияет на коэффициент обусловленности. Чем больше коэффициент, тем сильнее сказывается на решении СЛАУ ошибка в исходных данных. Число обусловленности не может быть меньше 1.
31. Метод прогонки для решения систем линейных алгебраических уравнений.
Часто возникает необходимость в решении систем, матрицы которых, являясь слабозаполненными, т.е. содержащими много ненулевых элементов. Матрицы таких систем обычно имеют определенную структуру, среди которых выделяют системы с матрицами ленточной структуры, т.е. в них ненулевые элементы располагаются на главной диагонали и на нескольких побочных диагоналях. Для решения систем с ленточными матрицами метод Гаусса можно трансформировать в более эффективные методы. Рассмотрим наиболее простой случай ленточных систем, к которым, как мы увидим впоследствии, сводится решение задач дискретизации краевых задач для дифференциальных уравнений методами конечных разностей, конечных элементов и др. Трёх диагональной матрицей называется такая матрица, у которой ненулевые элементы стоят только на главной диагонали и соседних с ней:
У трёх диагональной матрицы ненулевых элементов всего (3n-2).
Переобозначим коэффициенты матрицы:
.
Тогда в покомпонентной записи систему можно представить в виде:
ai * xi-1 + bi * xi + ci * xi+1 = di,i=1, 2,…, n; (7)
a1=0, cn=0. (8)
Структура системы предполагает взаимосвязь только между соседними неизвестными:
xi=xi *xi+1+hi (9)
Уменьшим в представлении (9) индекс на единицу:
xi-1=xi-1*xi + hi-1 и подставим в (7):
ai(xi-1*xi + hi-1)+ bi * xi + ci * xi+1 = di
(ai *xi-1 + bi )xi = –ci * xi+1 +di –ai * hi-1
Сравнивая полученное выражение с представлением (7), получаем:
(10)
Формулы (10) представляют рекуррентные соотношения для вычисления коэффициентов прогонки. Они требуют задания начальных значений. В соответствии с первым условием (8) для i =1 имеем a1=0, а значит
, .
Далее вычисляются и сохраняются остальные прогоночные коэффициенты по формулам (10) для i=2,3,…, n, причем при i=n, с учетом второго условия (8), получаем xn=0. Следовательно, в соответствии с формулой (9) xn = hn.
После чего по формуле (9) последовательно находятся неизвестные xn-1, xn-2, …, x1. Этот этап расчета называется обратным ходом, в то время как вычисление прогоночных коэффициентов называется прямым ходом прогонки.
Для успешного применения метода прогонки нужно, чтобы в процессе вычислений не возникало ситуаций с делением на нуль, а при большой размерности систем не должно быть быстрого роста погрешностей округления. Будем называть прогонку корректной, если знаменатель прогоночных коэффициентов (10) не обращается в ноль, и устойчивой, если ½xi½<1 при всех i=1,2,…, n. Достаточные условия корректности и устойчивости прогонки, которые во многих приложениях выполняются, определяются теоремой.
Теорема. Пусть коэффициенты ai и ci уравнения (7) при i=2,3,..., n-1 отличны от нуля и пусть
½bi½>½ai½+½ci½ при i=1, 2,..., n. (11)
Тогда прогонка, определяемая формулами (10), (9) корректна и устойчива.

 R;
R; .
. .
.
 |aij| (норма-максимум)
|aij| (норма-максимум)
 |aij| (норма-сумма)
|aij| (норма-сумма) , (спектральная норма)
, (спектральная норма) , где
, где  - наибольшее по модулю собственное значение матрицы A. Следовательно, в этом случае мы имеем
- наибольшее по модулю собственное значение матрицы A. Следовательно, в этом случае мы имеем  =
=  .
. . Тогда вектору b+
. Тогда вектору b+  будет соответствовать новое решение x+
будет соответствовать новое решение x+  : A(x+
: A(x+  ;
;  =
= 

 ; b = Ax;
; b = Ax;  =
= 
 тогда
тогда 




 *
*  , где
, где  - относительная погрешность возмущения решения,
- относительная погрешность возмущения решения,  ;
;  Свойства коэффициента: зависит от выбора нормы матрицы; cond(
Свойства коэффициента: зависит от выбора нормы матрицы; cond(  = cond(A); умножение матрицы на число не влияет на коэффициент обусловленности. Чем больше коэффициент, тем сильнее сказывается на решении СЛАУ ошибка в исходных данных. Число обусловленности не может быть меньше 1.
= cond(A); умножение матрицы на число не влияет на коэффициент обусловленности. Чем больше коэффициент, тем сильнее сказывается на решении СЛАУ ошибка в исходных данных. Число обусловленности не может быть меньше 1. 31. Метод прогонки для решения систем линейных алгебраических уравнений.
31. Метод прогонки для решения систем линейных алгебраических уравнений. ai * xi-1 + bi * xi + ci * xi+1 = di,i=1, 2,…, n; (7)
ai * xi-1 + bi * xi + ci * xi+1 = di,i=1, 2,…, n; (7) ai(xi-1*xi + hi-1)+ bi * xi + ci * xi+1 = di
ai(xi-1*xi + hi-1)+ bi * xi + ci * xi+1 = di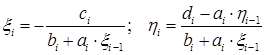
 (10)
(10) ,
,  .
.