Матрица - это таблица чисел или объектов другой природы. Следовательно, ее можно представить как таблицу, состоящую из m строк и n столбцов, или матрицу размером m×n или (m×n) - матрицу. Числа или другие объекты, находящиеся в клетках таблицы, называются элементами аij.
a11
а12
…
a1n
a21
a22
…
a2n
A
=
a31
a32
…
a3n
…
…
…
…
am1
am1
…
amn
Матрица размером n×n называется квадратичной, матрица размером 1×n –матрицей столбцом, или вектором.
Матрица, у которой все диагональные элементы (числа) равны единице, а остальные равны нулю, называется единичной
.
Сложение матриц. Сумма двух матриц одинаковых размеров является матрицей такого же размера, у которой элементы определяются как cij= aij + bij.
Операция сложения матриц коммуникативная
.
Умножение матриц. Умножение на число ,
где
то есть каждый элемент умножается на данное число . Очевидно, что
.
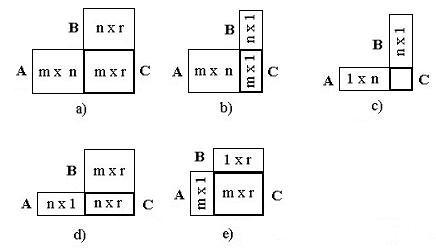
Умножение матриц возможно, если число столбцов множимого равно числу строк множителя.
Произведением матрицы размером (m×n) на матрицу (n×r) является матрица размером (m×r), текущий элемент которой cij равен сумме произведений элементов i-й строки матрицы на соответствующие элементы
j-го столбца матрицы, то есть
.
Возможные варианты представлены в следующих схемах
В результате умножений можно получить матрицу размером m×r (варианты а, е), матрицу-столбец (случай b), скалярную величину (случай с) и матрицу-строку (случай d).
Операция умножения матриц не подчиняется коммуникативному закону
.
Транспонирование матриц. Преобразование матрицы А, заключающееся в замене строк столбцами (или столбцов строками) при сохранении их нумерации, называется транспонированием. Транспонированная матрица обозначается АТ. В транспонированной матрице АТ диагональные элементы будут такими же, как в исходной матрице, а остальные элементы зеркально меняются, то есть матрица при транспонировании как бы переворачивается вокруг своей диагонали.
Определитель матрицы. Определитель (детерминант) матрицы А представляет число (числовую функцию), которое определяется по правилу, связанному с решением системы линейных уравнений. Для системы второго порядка
.
Для системы третьего порядка
Правила вычисления определителей (детерминантов) дано в [5].
Важное свойство определителей: определитель матрицы А равен определителю транспонированной матрицы АТ
.
Миноры и алгебраические дополнения. Эти понятия введены также для получения решения системы уравнений в общем виде.
Если в определителе n-го порядка выделить k различных строк (k≤n) и столько же различных столбцов, то элементы на пересечении этих строк столбцов образуют определитель, называемый минором. Очевидно, что минор n-го порядка совпадает с определителем. Если удалить из определителя строки и столбцы, участвующие в формировании минора, то оставшиеся элементы образуют определитель (n-k)-го порядок, называемый дополнением.
Миноры, образованные строками и столбцами с одинаковыми номерами, называются главными. Их диагональные элементы совпадают с диагональными элементами определителя.
Линейные преобразования. Систему уравнений n-го порядка
. (п.1.1)
можно рассматривать как линейное преобразование совокупности переменных х1, х2 …, хn в совокупность переменных y1, y2 ..., yn. В матричной форме система (п.1.1) имеет вид
. (п.1.2)
Такие линейные преобразования используются для перехода описания объекта из одного координатного базиса (системы переменных) к другому базису.
Обратная матрица. Система n уравнений, определяющая переменные хi, в матричном виде записывается следующим образом
. (п.1.3)
Умножим обе части этого уравнения на обратную матрицу А-1
.
Определив, что , получим решение уравнения (п.1.3)
.
Следовательно, обратную матрицу можно определить из правила решения системы n уравнений с n неизвестными называется присоединенной матрицей.
. (п.1.4)
где
.
Эта матрица представлена из алгебраических дополнений Δij.
Таким образом, последовательность действий определения обратной матрицы будет следующей: элементы aij исходной матрицы заменяются их алгебраическими дополнениями Δij; матрица алгебраических дополнений транспонируется, то есть получается присоединенная матрица adjA; вычисляется detA,- и присоединенная матрица умножается на величину, обратную detA.
Дифференциальные уравнения в матричной форме, описывающие динамику объекта, имеют следующий вид
. (п.1.5)
Его решение
,
где X0 – вектор начальных условий, – матрица динамики свободного движения.
Алгебраизируем уравнение (п.1.5), подвергнув его преобразованию Лапласа,
. (п.1.6)
Уравнение выхода объекта управления
. (п.1.7)
Уравнение (п.1.6) представим в виде
.
Тогда решение дифференциального уравнения в соответствии с (п.1.4) будет
.
Для выходного сигнала с учетом (п.1.7), получим
.
Следовательно, передаточная функция объекта будет определяться следующим выражением
, (п.1.8)
где - характеристический полином передаточной функции.

 .
. .
. ,
,
 . Очевидно, что
. Очевидно, что .
. .
.
 .
. .
.
 .
. . (п.1.1)
. (п.1.1) . (п.1.2)
. (п.1.2) . (п.1.3)
. (п.1.3) .
. , получим решение уравнения (п.1.3)
, получим решение уравнения (п.1.3) .
. . (п.1.4)
. (п.1.4) .
. . (п.1.5)
. (п.1.5) ,
, – матрица динамики свободного движения.
– матрица динамики свободного движения. . (п.1.6)
. (п.1.6) . (п.1.7)
. (п.1.7) .
. .
. .
. , (п.1.8)
, (п.1.8) - характеристический полином передаточной функции.
- характеристический полином передаточной функции.