Математическими моделями динамических систем автоматического управления являются дифференциальные уравнения. Решение этих уравнений с помощью вычислительных машин (ВМ) представляет собой способ получения информации о поведении системы методом машинного моделирования. Существуют два различных подхода к решению задач на ВМ.
В первом случае ВМ используется для чисто математического моделирования исследуемой системы дифференциальных уравнений без отражения в модели реальной структуры объекта – это способ непосредственного интегрирования (см. (2.7)).
Во втором случае АВМ используется для построения структурной модели, представляющей собой аналог, решающие элементы которого соединены между собой в соответствии с алгоритмической схемой исследуемой системы – это структурный способ.
При структурном способе модель системы представляется в виде блоков, имитирующих работу отдельных физических узлов (электрических машин, усилителей, регуляторов, датчиков и т. д.), причем каждый блок выполняется из моделей типовых динамических звеньев.
Таким образом, структурное моделирование предполагает воспроизведение структуры объекта, управляющего устройства и других элементов системы, которые представляются комбинацией элементарных звеньев.
Целесообразность применения структурных моделей связана с тем, что при исследовании на ВМ сохраняется структура исследуемого объекта, и поэтому на модели легко воспроизводится изменение отдельных параметров и способов соединения элементов, необходимое для обеспечения определенного качества переходного процесса системы.
При использовании способа непосредственного интегрирования исходное дифференциальное уравнение должно быть преобразовано к виду, наиболее удобному для исследования на модели.
При использовании структурного способа каждое типовое звено, описываемое дифференциальным уравнением, также должно быть представлено в виде, наиболее удобном для исследования на модели и для стыковки звеньев друг с другом.
И в том, и в другом случаях для решения дифференциальных уравнений с помощью аппаратных технических средств используют следующие методы решения, выбор которых зависит от типа дифференциальных уравнений и от конкретных задач, стоящих перед исследователем:
1. общий метод решения дифференциальных уравнений при помощи понижения порядка производной (метод последовательного интегрирования);
2. метод канонической формы;
3. метод вспомогательной переменной.
2.6. Общий метод решения дифференциальных уравнений.
Реализацию этого метода рассмотрим на примере решения дифференциального уравнения второго порядка с нулевыми начальными условиями:
. (2.9)
Суть метода состоит в том, что уравнение разрешают относительно старшей производной.
.
В вычислительной машине математические операции, заданные исходными уравнениями, выполняются над машинными переменными. Таким образом, переменным , , , в уравнении (2.9) будут соответствовать , , , , где
, .
Тогда уравнение (2.9) принимает вид:
.
Машинные переменные и можно получить последовательным интегрированием . И блок-схема решения дифференциального уравнения (2.9) будет иметь вид, представленный на рис. 2.4.
Рис. 2.4. Блок-схема решения методом понижения порядка.
Достоинствами общего метода решения дифференциальных уравнений являются простота и наглядность решения задачи. Недостатком метода является то, что его нельзя применять, если правая часть уравнения содержит производные входной переменной.
2.7. Решение дифференциальных уравнений методом канонической формы.
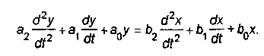
Реализацию этого метода рассмотрим на примере решения дифференциального уравнения второго порядка с производными в правой части.
(2.10)
Суть метода состоит в том, что исходное уравнение разрешают относительно искомой переменной у. Для этого уравнение (2.10) записывают в операторной форме
(2.11)
а затем все члены уравнения (2.11) делят на « »:
Разрешим уравнение (2.11) относительно « » и сгруппируем переменные:
(2.12)
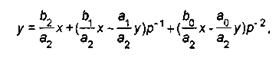
или
(2.13)
Обозначим
; . (2.14)
.
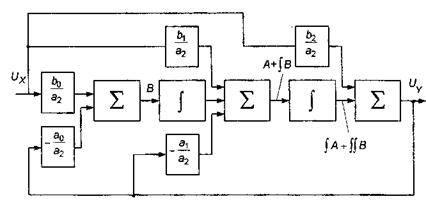
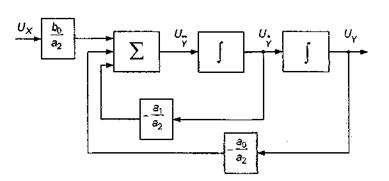
Блок-схема решения методом канонической формы имеет вид.
Рис. 2.5. Блок-схема решения методом канонической формы имеет вид.
Достоинства метода в том, что он позволяет решать дифференциальные уравнения, содержащие производные в правой части. Недостатками являются малая физичность, ненаглядность и невозможность задания начальных условий.

 . (2.9)
. (2.9) .
. ,
,  ,
,  ,
,  в уравнении (2.9) будут соответствовать
в уравнении (2.9) будут соответствовать  ,
,  ,
,  ,
,  ,
,  .
. .
.
 (2.10)
(2.10) (2.11)
(2.11) »:
»:
 (2.12)
(2.12) (2.13)
(2.13) ;
;  . (2.14)
. (2.14) .
.