Рассмотрим систему, структурная схема которой представлена на рис. 2.21. Будем предполагать, что действующие на объект в различных его точках возмущающие воздействия f1(t),...,fk(t) невозможно измерить непосредственно, но можно привести к его входу. Приведённое ко входу объекта возмущающее воздействие обозначим F1(t), Необходимо так построить систему, чтобы выходная координата φ объекта воспроизводила задающее воздействие g(t) c точностью до переходной составляющей.
Пусть движение объекта описывается дифференциальным уравнением порядка (п — т)
(2.144)
Здесь μ - выходная координата исполнительного устройства (ИУ). Параметры bi объекта предполагаются постоянными, а bn-m=1. Функцию F1(t) будем предполагать непрерывно дифференцируемой до порядка т включительно
Рис. 2.21.
Движение исполнительного устройства описывается дифференциальным уравнением m-го порядка
(2.145)
где Θi1 - параметры ИУ, Θт1=1
Предположим, что исполнительное устройство можно охватить местной обратной связью (ОС) такой, что
(2.146)
где Θi2 - коэффициенты звена ОС, которые можно изменять в зависимости от значений координат системы. Из (2.145) и (2.146) можно получить следующее уравнение движения исполнительного устройства с учетом местной обратной связи:
(2.147)
где Θi =Θi1+Θi2, и - управляющее воздействие, формируемое при помощи управляющего устройства УУ.
Сформируем управление и в виде линейной комбинации координаты ошибки и (п-2) её производных:
(2.148)
где Ψi+1 - коэффициенты УУ, которые так же, как Θi определяются координатами системы; х - координата ошибки:
(2.149)
Уравнения (2.144) и (2.149) позволяют найти связь между регулирующим воздействием и координатой ошибки
(2.150)
(2.151)
Из (2.147), (2.148) и (2.150) получаем дифференциальное уравнение движения замкнутой системы
(2.152)
здесь все аi являются коэффициентами полинома п-й степени, полученного в результате перемножения полиномов
(2.153)
Запишем уравнение (2.152) в виде системы п дифференциальных уравнений первой степени:
(2.154)
Сформируем в системе функцию переключения следующего вида:
(2.155)
где ci - постоянные коэффициенты, сп=1, и зададим следующие законы изменения коэффициентов Ψi и Θi:
(2.156)
(2.157)
Нетрудно заметить, что в построенной таким образом системе может возникнуть скользящий режим. Действительно, в фазовом пространстве системы (2.154) уравнение
(2.158)
задает гиперплоскость S. При пересечении изображающей точкой этой гиперплоскости вектор фазовой скорости меняет свое направление, так как компонента этого вектора зависит от величин Ψi и Θi, которые на гиперплоскости вменяют скачкообразно свое значение. Очевидно что выбором значений этих величин можно обеспечить встречное направление векторов фазовой скорости на гиперплоскости S, т. е. выполнить условие возникновения скользящего режима. Точнее, как это ранее уже отмечалось, для возникновения скользящего режима необходимо и достаточно, чтобы скалярное произведение вектора фазовой скорости на нормаль к гиперплоскости S меняло знак на этой гиперплоскости в соответствии с неравенствами
(2.159)
где вектор c=(cl ..., сп).
При возникновении скользящего режима движение системы доопределим, как и ранее, равенствами
С помощью такого доопределения нетрудно найти, что движение системы в скользящем режиме будет описываться системой линейных однородных уравнений
(2.160)
Существенно, что движение в скользящем режиме не зависит ни от параметров объекта, ни от приложенных к нему возмущений и полностью определяется параметрами ci гиперплоскости S.
Теперь становится очевидным следующий путь решения задачи о воспроизводимости выходной координатой φ задающего воздействия. При любых начальных условиях для системы (2.154) необходимо обеспечить возникновение скользящего режима, с помощью которого свести к нулю координату ошибки х1. Другими словами, изображающая точка в фазовом пространстве должна из любого начального положения попасть на гиперплоскость S, а затем двигаясь по этой гиперплоскости, прийти в начало координат. С этого момента выходная координата будет точно воспроизводить задающее воздействие g(t). Совершенно очевидно, что движение в скользящем режиме должно быть устойчивым. Если других требований к процессу управления не предъявляется, то именно из этого условия и следует исходить, выбирая величины ci.
Будем предполагать, что гиперплоскость S – гиперплоскость скольжения.
Покажем, что выбором значений Ψi и Θi можно выполнить неравенства (2.159) в любой точке гиперплоскости S, если функция F(t) удовлетворяет соотношению
(2.161)
Заметим, что класс функций F(t), для которых выполняется соотношение (2.161) - для удобства изложения в дальнейшем этот класс будем называть классом - достаточно широк. Так, например, классу принадлежат показательные функции, полиномы, непрерывные знакопостоянные функции с ограниченной первой производной; классу принадлежат показательные и гармонические функции и полиномы, корни которых различны. Соотношение (2.161) не выполняется, например, для F(t)=еxt при α>1.
Неравенства (2.159) для системы (2.154) можно записать в виде
(2.162)
Здесь Ψn=0. Если потребовать выполнения этих неравенств всюду на гиперплоскости S, т.е. в любой точке с координатами
то (2.162) примут вид
(2.163)
где
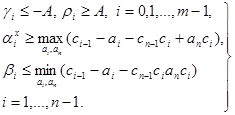
Последние неравенства будут выполнены, если значения величин Ψi и Θi, будут выбраны следующим образом:
(2.164)
Следует отметить, что коэффициенты ai, определяемые согласно (2.153) меняются вместе со скачкообразным изменением Θi. Чтобы учесть эти изменения при выборе значений αi и βi, во второй группе неравенств (2.164) взяты соответственно максимальные и минимальные значения. Конечно, вначале надо определить γi и ρi а затем - величины αi и βi.
При выполнении условий (2.164) после попадания изображающей точки на гиперплоскость S её дальнейшее движение не зависит от приложенных к объекту возмущений и определяется только коэффициентами ci системы (2.160). После попадания изображающей точки в достаточно малую окрестность начала координат фазового пространства, определяемую требуемой точностью, координата φ будет отслеживать задающее воздействие g(t)
Таким образом, логические законы (2.156) и (2.157) изменения коэффициентов Ψi и Θi, главной и местной обратных связей позволяют для внешних воздействий класса (2.161) обеспечить воспроизводимость регулируемой величиной задающего воздействия без измерения внутренних координат объекта.
Если возмущающие воздействия недоступны для непосредственного измерения, как это часто бывает на практике, и следовательно реализация закона (2.157) невозможна, его надо заменить законом, который очевидным образом следует из (2.150) и (2.157)
(2.165)
При реализации логического закона (2.165) требуется информация о выходной координате исполнительного устройства и ее производных. Как правило, такую информацию легче получить, чем информацию о внешних воздействиях, действующих на объект управления.
Рассмотренная задача о воспроизведении задающего воздействия позволила достаточно наглядно проиллюстрировать принципы синтеза законов управления вынужденным движением в системах с переменной структурой. Центральной идеей здесь является, пожалуй, введение коммутируемой обратной связи, охватывающей исполнительное устройство. Это позволяет обеспечить существование скользящего режима в системе при действии на объект внешних возмущений независимо от точек их приложения.

 (2.144)
(2.144)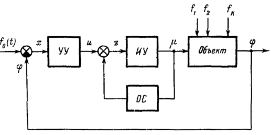
 (2.145)
(2.145) (2.146)
(2.146) (2.147)
(2.147) (2.148)
(2.148) (2.149)
(2.149) (2.150)
(2.150) (2.151)
(2.151) (2.152)
(2.152)
 (2.153)
(2.153) (2.154)
(2.154) (2.155)
(2.155) (2.156)
(2.156) (2.157)
(2.157) (2.158)
(2.158) фазовой скорости меняет свое направление, так как компонента
фазовой скорости меняет свое направление, так как компонента  этого вектора зависит от величин Ψi и Θi, которые на гиперплоскости вменяют скачкообразно свое значение. Очевидно что выбором значений этих величин можно обеспечить встречное направление векторов фазовой скорости на гиперплоскости S, т. е. выполнить условие возникновения скользящего режима. Точнее, как это ранее уже отмечалось, для возникновения скользящего режима необходимо и достаточно, чтобы скалярное произведение вектора фазовой скорости на нормаль к гиперплоскости S меняло знак на этой гиперплоскости в соответствии с неравенствами
этого вектора зависит от величин Ψi и Θi, которые на гиперплоскости вменяют скачкообразно свое значение. Очевидно что выбором значений этих величин можно обеспечить встречное направление векторов фазовой скорости на гиперплоскости S, т. е. выполнить условие возникновения скользящего режима. Точнее, как это ранее уже отмечалось, для возникновения скользящего режима необходимо и достаточно, чтобы скалярное произведение вектора фазовой скорости на нормаль к гиперплоскости S меняло знак на этой гиперплоскости в соответствии с неравенствами (2.159)
(2.159)
 (2.160)
(2.160) (2.161)
(2.161) - достаточно широк. Так, например, классу
- достаточно широк. Так, например, классу  принадлежат показательные функции, полиномы, непрерывные знакопостоянные функции с ограниченной первой производной; классу
принадлежат показательные функции, полиномы, непрерывные знакопостоянные функции с ограниченной первой производной; классу  принадлежат показательные и гармонические функции и полиномы, корни которых различны. Соотношение (2.161) не выполняется, например, для F(t)=еxt при α>1.
принадлежат показательные и гармонические функции и полиномы, корни которых различны. Соотношение (2.161) не выполняется, например, для F(t)=еxt при α>1. (2.162)
(2.162) то (2.162) примут вид
то (2.162) примут вид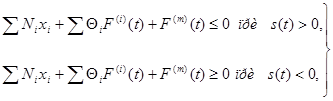 (2.163)
(2.163)
 (2.164)
(2.164)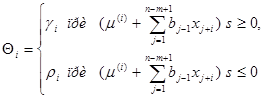 (2.165)
(2.165)