Хорошо известно, что любая реальная система автоматического управления функционирует в условиях воздействия на неё внешней среды. Это воздействие может проявляться в виде задающего воздействия, которое должно быть тем или иным образом отработано системой, а также в виде возмущающих воздействий самого разнообразного характера, приложенных к различным точкам системы управления. Обеспечение нормального функционирования системы управления часто осложняется тем, что возмущающие воздействия бывает невозможно измерить. Однако при проектировании системы управления, как правило, имеется некоторая априорная информация о возмущающих воздействиях, которая позволяет синтезировать систему, выполняющую поставленные перед ней задачи без непосредственного измерения возмущающих воздействий. Системы с переменной структурой обладают рядом дополнительных возможностей при решении задач управления вынужденным движением. Ограничимся пока системами с постоянными параметрами. Прежде чем перейти непосредственно к изложению методов управления вынужденным движением в системах с переменной структурой, представляется целесообразным на простейшем примере системы второго порядка проследить особенности, возникающие в СПС при использовании предложенных выше алгоритмов для управления вынужденным движением. Выявив эти особенности, мы сможем более наглядно представить себе пути решения задач синтеза СПС более высокого порядка и предложить алгоритмы управления вынужденным движением в таких системах без измерения внешних возмущений. Однако в тех случаях, когда измерение последних допустимо по условиям задачи, не следует, очевидно, пренебрегать этой возможностью. В связи с этим мы рассмотрим методы синтеза комбинированных систем с переменной структурой.
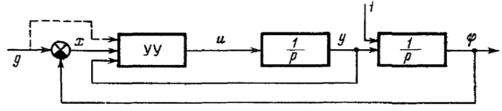
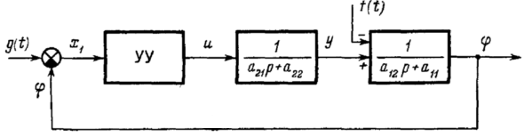
Рассмотрим особенности, возникающие в простейшей системе второго порядка, изображенной на рис. 2.15, выходная координата которой должна воспроизводить задающее воздействие g(t). Будем предполагать, что на объект, являющийся астатическим звеном первого порядка, действует внешнее возмущающее воздействие f(t). Управление объектом осуществляется с помощью астатического сервомеханизма. Наша цель –
Рис. 2.15
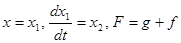
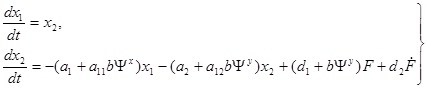
сформировать такой алгоритм работы управляющего устройства (УУ), который обеспечивал бы воспроизводимость регулируемой координатой φ(t) задающего воздействия g(t) независимо от внешних возмущений. Предполагая х =g-φ, φ =у-f и вводя обозначения получим уравнения движения объекта, исполнительного устройствам замкнутой системы соответственно:
(2.118)
(2.119)
(2.120)
Ранее рассматривалась задача управления свободным движением (F≡0) системы подобного вида. Для управления вида (2.22) - (2.24) при выполнении условий (2.32) на прямой S (2.25) всюду возникал скользящий режим и выбором углового коэффициента с этой прямой обеспечивались требуемые характеристики процесса регулирования.
При возмущенном движении системы (F≠ 0) и использовании законов управления (2.22) - (2.24) в системе также может возникнуть движение в скользящем режиме, описываемое уравнением (2.26), причем это движение не будет зависеть ни от параметров объекта, ни от внешних возмущений. Для того чтобы использовать свойство независимости скользящих движений, можно предложить следующий подход к решению задачи воспроизводимости выходной координатой задающего воздействия: обеспечить, во-первых, попадание изображающей точки на прямую S и, во-вторых, выполнение условий существования скользящего режима в любой точке этой прямой. Тогда после возникновения скользящего режима, согласно (2.26), при с>0 координата ошибки будет асимптотически приближаться к нулю. Однако с помощью управления (2.22) - (2.24) не удается реализовать описанный подход. Этот факт легко устанавливается из рассмотрения фазовой плоскости (x1, х2) системы (2.118), представленной на рис. 2.16.
Рис. 2.16
Оговоримся, что так как дифференциальные уравнения (2.120) являются неоднородными, то фазовый портрет будет нестационарным. Поэтому кривые, показанные на рис. 2.16, вообще говоря, не являются фазовыми траекториями. Каждую из них можно рассматривать как геометрическое место точек, для которых в некоторый фиксированный момент времени касательная к кривой совпадает с направлением вектора фазовой скорости. Фазовая плоскость (x1, х2), делится прямыми S и x1=0 на области, каждой из которых соответствует семейство кривых эллиптического или гиперболического типа. Центр и седло этих кривых находится в точках а и b,причем (если α>0, β<0, F(t0<0).
Непосредственно из рассмотрения рис. 2.16 следует, что на интервале тп прямой S скользящий режим отсутствует. Действительно, для возникновения скользящего режима векторы фазовых скоростей должны быть направлены к S, однако это условие нарушается на интервале пO для кривых гиперболического типа, а на интервале тпО - для кривых эллиптического типа.
Важно отметить, что за исключением тех моментов времени, когда (t)=0, интервал тп всегда существует. Следовательно, в некоторой конечной окрестности начала координат плоскости (x1,х2) скользящий режим отсутствует и решение системы (2.118) содержит вынужденную составляющую. Именно это обстоятельство приводит к тому, что в системе с переменной структурой с законом управления (2.22) - (2.24) при вынужденном движении не удаётся избавиться от динамической ошибки. Условия существования скользящего режима в окрестности начала координат плоскости (x1, х2) нарушаются из-за того, что величина управления становится малой по сравнению с величиной (t). Поэтому в основном от знака функции (t) зависит, направлены ли векторы фазовой скорости к прямой S или от неё. Например, в рассматриваемом случае при (t)<0 скользящий режим на интервале тп отсутствует, так как на этом интервале векторы фазовой скорости направлены в сторону уменьшения величины s, т. е. при s<0 - от прямой S [13].
Из приведенных рассуждений следует, что управление необходимо сформировать таким образом, чтобы направление векторов фазовой скорости в окрестности начала координат существенно зависело бы не только от внешних воздействий, но и от самого управления. Заметим, что координата у в режиме воспроизведения при (х1=х2=0) отлична от нуля, так как выходная величина исполнительного устройства должна воспроизводить сумму приведенных ко входу объекта внешних воздействий. Поэтому следует ожидать, что направление векторов фазовой скорости в окрестности начала координат будет зависеть от управления, сформированного в виде
(2.121)
(2.122)
(2.123)
(2.124)
Логический закон изменения Ψy будет приведен ниже. Движение замкнутой системы с управлением (2.119), согласно (2.181), (2.119), описывается дифференциальными уравнениями
(2.125)
На рис. 2.17, а и б представлены фазовые портреты такой системы соответственно для случаев F>0, <0, Ψy>0 и F>0, <0, Ψy<0 в предположении, что |ΨyF|>|F| и корни характеристического уравнения системы (2.125) являются комплексными при Ψx=αx и любом фиксированном Ψy. Каждую из кривых, показанных на рисунках, по-прежнему следует рассматривать как геометрическое место точек, для которых касательная к кривой совпадает с направлением вектора фазовой скорости. Для αх>0, βx<0 абсциссы фокуса и седла этих кривых находятся в точках a и b, причем .Пусть угловой коэффициент с прямой S, заданной уравнением s=0 (4.6), всегда больше отрицательного корня характеристического уравнения системы (2.125) Ψx=βx, (т.е. больше углового коэффициента асимптоты
Рис. 2.17.
I для кривых гиперболического типа). Тогда, как это следует из рассмотрения фазовых портретов, в обоих случаях на прямой S существует интервал тп, включающий начало координат, на котором не может возникнуть движение в скользящем режиме. Следовательно, если величина коэффициента Ψy в управлении (2.121) неизменна, то в системе (2.125), так же как и в системе (2.120), при F≠0 динамическая ошибка не может быть сведена к нулю. Однако существенно, что знак коэффициента Ψy определяет направление векторов фазовой скорости вблизи прямой S на интервале тп. Так, при Ψy>0 векторы фазовой скорости направлены в стороны увеличения s, т. е. >0, и поэтому при s>0 нарушаются условия возникновения скользящего режима (2.27), при Ψy<0 имеет место обратная картина. Нетрудно видеть, что на всей прямой S будет существовать скользящий режим, если построить такую систему, фазовый портрет которой при s<0 совпадает с фазовым портретом рис. 2.17, а, а при s>0 - рис. 4.3, б (рис. 2.18). Это условие будет выполнено, если в результате изменения коэффициента Ψy окажутся справедливыми неравенства
(2.126)
Напомним, что по нашему предположению | ΨyF|> |F|. Пусть возмущающее и задающее воздействия таковы, что выполняется следующее соотношение:
(2.127)
Тогда из (2.126) и (2.127) получаем следующий закон изменения коэффициента Ψy, обеспечивающий существование скользящего режима всюду на прямой S:
(2.128)
Важно отметить, что логический закон (2.128) может оказаться неприемлемым, так как для его реализации необходимо осуществить непосредственное измерение внешних возмущений (для формирования функции F), а это во многих случаях невозможно. Согласно (2.118) информация о величине F может быть получена косвенно, с использованием координат x и у. В результате приходим к более удобному с точки зрения практических приложений закону изменения коэффициента Ψy:
(2.129)
Рассматривая различные сочетания знаков функций F и ,можно легко проверить, что при выполнении ограничения (2.127) и изменении коэффициента воздействия по выходной координате исполнительного устройства в соответствии с (2.128) или (2.129) встречное направление векторов фазовой скорости в любой точке прямой S всегда имеет место. Следовательно, в построенной таким образом системе прямая S является прямой скольжения.
Рис 2.18.
Сам по себе факт существования прямой скольжения ещё не гарантирует воспроизводимости. Необходимо обеспечить возникновение скользящего режима в системе или, другими словами, обеспечить попадание изображающей точки из любого начального положения её на прямую S. Только в этом случае в системе начнется независимое от внешних воздействий движение, в котором сигнал ошибки будет асимптотически стремиться к нулю.
Было показано, что для свободного движения необходимым и достаточным условием попадания является отсутствие положительных действительных корней характеристического уравнения при Ψx=αx. Если условия этой теоремы выполняются как при Ψy=A, так и при Ψy= -А, то она справедлива также и для вынужденного движения Приведём сейчас лишь некоторые предварительные соображения, подтверждающие это положение. Существенно, что следует рассмотреть лишь вопрос о достаточности условий теоремы, так как необходимость следует из того, что свободное движение является частным случаем вынужденного.
Пусть в начальный момент времени изображающая точка находится в первом квадранте (рис. 2.19). Так как в этот момент времени х2>0 , то величина х1 начнет возрастать. По условию теоремы при свободном движении и фиксированном Ψy любая траектория должна пересечь прямую S, поэтому траектории 1 и 2, исходящие из начальной точки а0 и соответствующие Ψy =А и Ψy = - А для F≡0, пересекают ось х1 в точках b и с. Следует отметить, что, согласно (2.125) - (2.128), величина для вынужденного движения при s>0 всегда меньше, чем для свободного движения. Следовательно, траектория, соответствующая вынужденному движению и исходящая из точки a0, не может иметь общих точек с траекторией 2 и пересекает ось х1 в некоторой точке а1 на отрезке dc . Проведем из точки а1 траектории 3 и 4, соответствующие Ψy=+А и Ψy= -А при F≡0, до пересечения с прямой S в точках е и f . Заметим, что для F≠0 траектория, исходящая из точки а1, не имеет общих точек с траекторией 3. Это в свою очередь означает, что изображающая точка из а1 всегда попадает в некоторую точку а2 на отрезке eg , т. е. на прямую S. Если в начальный момент времени изображающая точка находится в области х1>0, s<0, то при дальнейшем движении либо произойдет попадание на S, либо сменит знак величина х1. Для х1<0, s<0 можно повторить приведенные рассуждения и также убедиться в том, что попадание на прямую S всегда имеет место. Существование прямой скольжения одновременно с выполнением приведенных условий попадания на эту прямую уже может гарантировать возникновение скользящего режима и, как следствие, сведение к нулю координаты ошибки.
Рис. 2.19
Приведем теперь аналитический метод синтеза управления для системы второго порядка общего вида с постоянными параметрами (рис. 2.20). Уравнение объекта, исполнительного устройства и замкнутой системы записываются в виде
(2.130)
(2.131)
(2.132)
где a11, а12, а21, а22 - постоянные, а12>0, а21>0,
Покажем, что если для функции F выполняется неравенство (2.127), то с помощью управления вида (2.121) за счёт скользящих
Рис. 2.20.
режимов в системе может быть достигнута полная воспроизводимость регулируемой координатой φ задающего воздействия g(t). Согласно (2.121) и (2.130) вместо (2.131) можно рассматривать систему
(2.133)
Предположим, что каждый из коэффициентов Ψx и Ψy может принимать одно из двух фиксированных значений соответственно αх или βx и αу или βу, т. е. в нашем распоряжении имеются четыре линейные структуры. Задача состоит в выборе такой последовательности изменения этих структур, а также параметров каждой из них, при которых на некоторой прямой S, заданной в плоскости (x1,x2) уравнением s=cx1+x2=0 выполнялись бы условия существования скользящего режима (2.27). Определим величину на прямой S.
(2.134)
Потребуем, чтобы выполнялись соотношения
(2.135)
(2.136)
Для функции F, удовлетворяющей соотношению (2.127), неравенство (2.135) справедливо, если
(2.137)
или, согласно (2.130),
(2.138)
где
(2.139)
Запишем теперь закон изменения коэффициента Ψx, обеспечивающий выполнение неравенства (4.19)
(2.140)
где
(2.141)
Если все коэффициенты (2.141) выразить через параметры объекта и исполнительного устройства, то с учётом (2.139) неравенства (2.141) перепишутся в виде
(2.142)
Если значения коммутируемых коэффициентов Ψу и Ψх выбраны в соответствии с (2.139) и (2.142), то управление (2.121), (2.138), (2.140) обеспечит существование прямой скольжения. Что касается условий попадания изображающей точки на прямую скольжения, то необходимость специального рассмотрения этого вопроса - отпадает, так как все рассуждения, касающиеся условий попадания для системы (2.125), справедливы и для произвольной системы второго порядка. Для попадания изображающей точки из любого начального положения на прямую S необходимо и достаточно, чтобы характеристическое уравнение системы (2.133) для Ψх=αх как при Ψy = А, так и при Ψy = -А не имело положительных действительных корней, т. е.
(2.143)
Очевидно, что неравенства (2.142) и (2.143) всегда можно выполнить одновременно как при Ψy=А, так и при Ψу= -А. Тогда любое движение в системе, начиная с некоторого момента времени, перейдет в скользящий режим, описываемый линейным однородным дифференциальным уравнением , не зависящим от внешних воздействий. Это означает, что с помощью системы с переменной структурой, в которой скачкообразно меняется не только коэффициент воздействия по сигналу ошибки, но и по выходной координате исполнительного устройства, удается решить задачу о полной воспроизводимости для входных воздействий вида (2.127).
Наиболее существенная особенность описанного закона Управления заключается в том, что для его реализации не возникает необходимости в непосредственном измерении приложенных к объекту внешних возмущающих сил; требуется информация о состоянии управляемого процесса в виде координаты ошибки, её производной и выходной величины исполнительного устройства. Уместно также пояснить эффект полной воспроизводимости в такой системе с физической точки зрения. Присутствие в управлении выходной координаты исполнительного устройства (ИУ) означает, что ИУ охвачено местной обратной связью, знак которой меняется. В случае положительной обратной связи ИУ оказывается неустойчивым звеном. При этом выходной сигнал его быстро нарастает до тех пор, пока не сравняется по абсолютной величине с приведенным ко входу объекта внешним возмущением. В установившемся режиме, когда координата ошибки и её производная равны нулю, автоматически обеспечивается такое чередование положительной и отрицательной местной обратной связи, при котором регулируемая величина повторяет задающее воздействие.
Таким образом, система с переменной структурой, сочетая в себе свойства нескольких линейных структур, открывает дополнительные возможности управления вынужденным движением. Сопоставляя описанную систему с переменной структурой с линейными системами, заметим, что применение методов, разработанных в теории инвариантности, повышение порядка астатизма для компенсации внешних воздействий в линейных системах в конечном счёте сводится к выбору такой устойчивой линейной структуры, при которой особая точка фазовой плоскости находится в начале координат. Однако организация управления в этих случаях может натолкнуться на трудности, связанные либо с непосредственным измерением внешних воздействий, либо с тем, что класс допустимых внешних воздействий оказывается слишком узким. Полная воспроизводимость в СПС обеспечивается за счет скользящего режима, существование которого, как это следует из рассмотрения фазовых портретов, определяется лишь тем, с какой стороны от начала координат расположена особая точка семейства кривых, соответствующего той или иной линейной структуре. Описанный метод позволяет свести динамическую ошибку в системе к нулю, и при этом не возникает необходимости в выборе такого управления, при котором правая часть дифференциального уравнения движения обращается в нуль. Это различие является весьма существенным, так как при реализации управления в СПС достаточно иметь информацию только о знаке функции F, характеризующей внешние воздействия, и не возникает необходимости в повышении порядка астатизма регулятора.
Рассмотренный пример системы второго порядка показывает эффективность алгоритмов СПС при решении задач управления в условиях действия на систему внешних возмущений.

 получим уравнения движения объекта, исполнительного устройствам замкнутой системы соответственно:
получим уравнения движения объекта, исполнительного устройствам замкнутой системы соответственно: (2.118)
(2.118) (2.119)
(2.119)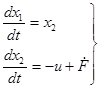 (2.120)
(2.120)
 (если α>0, β<0, F(t0<0).
(если α>0, β<0, F(t0<0). (t)=0, интервал тп всегда существует. Следовательно, в некоторой конечной окрестности начала координат плоскости (x1,х2) скользящий режим отсутствует и решение системы (2.118) содержит вынужденную составляющую. Именно это обстоятельство приводит к тому, что в системе с переменной структурой с законом управления (2.22) - (2.24) при вынужденном движении не удаётся избавиться от динамической ошибки. Условия существования скользящего режима в окрестности начала координат плоскости (x1, х2) нарушаются из-за того, что величина управления становится малой по сравнению с величиной
(t)=0, интервал тп всегда существует. Следовательно, в некоторой конечной окрестности начала координат плоскости (x1,х2) скользящий режим отсутствует и решение системы (2.118) содержит вынужденную составляющую. Именно это обстоятельство приводит к тому, что в системе с переменной структурой с законом управления (2.22) - (2.24) при вынужденном движении не удаётся избавиться от динамической ошибки. Условия существования скользящего режима в окрестности начала координат плоскости (x1, х2) нарушаются из-за того, что величина управления становится малой по сравнению с величиной  (2.121)
(2.121) (2.122)
(2.122) (2.123)
(2.123) (2.124)
(2.124) (2.125)
(2.125) .Пусть угловой коэффициент с прямой S, заданной уравнением s=0 (4.6), всегда больше отрицательного корня характеристического уравнения системы (2.125) Ψx=βx, (т.е. больше углового коэффициента асимптоты
.Пусть угловой коэффициент с прямой S, заданной уравнением s=0 (4.6), всегда больше отрицательного корня характеристического уравнения системы (2.125) Ψx=βx, (т.е. больше углового коэффициента асимптоты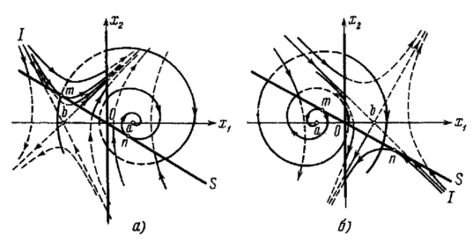
 >0, и поэтому при s>0 нарушаются условия возникновения скользящего режима (2.27), при Ψy<0 имеет место обратная картина. Нетрудно видеть, что на всей прямой S будет существовать скользящий режим, если построить такую систему, фазовый портрет которой при s<0 совпадает с фазовым портретом рис. 2.17, а, а при s>0 - рис. 4.3, б (рис. 2.18). Это условие будет выполнено, если в результате изменения коэффициента Ψy окажутся справедливыми неравенства
>0, и поэтому при s>0 нарушаются условия возникновения скользящего режима (2.27), при Ψy<0 имеет место обратная картина. Нетрудно видеть, что на всей прямой S будет существовать скользящий режим, если построить такую систему, фазовый портрет которой при s<0 совпадает с фазовым портретом рис. 2.17, а, а при s>0 - рис. 4.3, б (рис. 2.18). Это условие будет выполнено, если в результате изменения коэффициента Ψy окажутся справедливыми неравенства (2.126)
(2.126) (2.127)
(2.127) (2.128)
(2.128) (2.129)
(2.129)
 для вынужденного движения при s>0 всегда меньше, чем для свободного движения. Следовательно, траектория, соответствующая вынужденному движению и исходящая из точки a0, не может иметь общих точек с траекторией 2 и пересекает ось х1 в некоторой точке а1 на отрезке dc
для вынужденного движения при s>0 всегда меньше, чем для свободного движения. Следовательно, траектория, соответствующая вынужденному движению и исходящая из точки a0, не может иметь общих точек с траекторией 2 и пересекает ось х1 в некоторой точке а1 на отрезке dc  . Проведем из точки а1 траектории 3 и 4, соответствующие Ψy=+А и Ψy= -А при F≡0, до пересечения с прямой S в точках е и f . Заметим, что для F≠0 траектория, исходящая из точки а1, не имеет общих точек с траекторией 3. Это в свою очередь означает, что изображающая точка из а1 всегда попадает в некоторую точку а2 на отрезке eg
. Проведем из точки а1 траектории 3 и 4, соответствующие Ψy=+А и Ψy= -А при F≡0, до пересечения с прямой S в точках е и f . Заметим, что для F≠0 траектория, исходящая из точки а1, не имеет общих точек с траекторией 3. Это в свою очередь означает, что изображающая точка из а1 всегда попадает в некоторую точку а2 на отрезке eg  , т. е. на прямую S. Если в начальный момент времени изображающая точка находится в области х1>0, s<0, то при дальнейшем движении либо произойдет попадание на S, либо сменит знак величина х1. Для х1<0, s<0 можно повторить приведенные рассуждения и также убедиться в том, что попадание на прямую S всегда имеет место. Существование прямой скольжения одновременно с выполнением приведенных условий попадания на эту прямую уже может гарантировать возникновение скользящего режима и, как следствие, сведение к нулю координаты ошибки.
, т. е. на прямую S. Если в начальный момент времени изображающая точка находится в области х1>0, s<0, то при дальнейшем движении либо произойдет попадание на S, либо сменит знак величина х1. Для х1<0, s<0 можно повторить приведенные рассуждения и также убедиться в том, что попадание на прямую S всегда имеет место. Существование прямой скольжения одновременно с выполнением приведенных условий попадания на эту прямую уже может гарантировать возникновение скользящего режима и, как следствие, сведение к нулю координаты ошибки.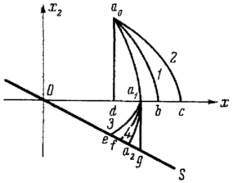
 (2.130)
(2.130) (2.131)
(2.131) (2.132)
(2.132)

 (2.133)
(2.133) (2.134)
(2.134) (2.135)
(2.135) (2.136)
(2.136) (2.137)
(2.137) (2.138)
(2.138) (2.139)
(2.139) (2.140)
(2.140) (2.141)
(2.141) (2.142)
(2.142) (2.143)
(2.143) , не зависящим от внешних воздействий. Это означает, что с помощью системы с переменной структурой, в которой скачкообразно меняется не только коэффициент воздействия по сигналу ошибки, но и по выходной координате исполнительного устройства, удается решить задачу о полной воспроизводимости для входных воздействий вида (2.127).
, не зависящим от внешних воздействий. Это означает, что с помощью системы с переменной структурой, в которой скачкообразно меняется не только коэффициент воздействия по сигналу ошибки, но и по выходной координате исполнительного устройства, удается решить задачу о полной воспроизводимости для входных воздействий вида (2.127).