Как уже было отмечено выше, что для определенного класса управляемых объектов, описываемых уравнениями (2.34), системы с переменной структурой могут найти плодотворное применение.
Заметим, что уравнения, характеризующие вышеупомянутый класс объектов, не предполагали дифференцирования функции управления. Однако весьма важным для практических приложений является случай, когда движение неизменяемой части системы описывается уравнением, более общего по сравнению с (2.33) или (2.34) вида
(2.81)
где n, m - целые постоянные числа ( ); ai,bi – постоянные параметра объекта; x - сигнал ошибка, u-управление.
Очевидно, что в линейных системах с управлением вида (или ) необходимость дифференцирования входных управляющих воздействий не приводит к качественно новым явлениям в поведении системы. Но в системах с кусочно-непрерывным законом управления (2.35) - (2.37) необходимость дифференцирования управления приводит к ряду особенностей, не наблюдаемых ранее.
Рассмотрим структурную схему системы управления, изображенную на рис. 2.10. Пусть движение управляемого объекта О описывается уравнением второго порядка
(2.82)
где - постоянные коэффициенты, х – ошибка
На вход объекта поступает выходная величина у исполнительного устройства ИУ. Предположим, что движение ИУ описывается уравнением
(2.83)
Из (2.82) и (2.83) очевидно, что движение разомкнутой системы описывается уравнением (2.81), если положить .
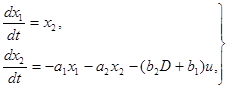
В фазовых координатах х = х1 и х2 =dx1/dt это уравнение
переписывается в виде следующей системы:
(2.84)
где постоянные, - символ дифференцирования.
Как и ранее, об управлении u будем предполагать, что оно является разрывной функцией координат системы
u=Ψx1 (2.85)
(2.86)
(2.87)
постоянные величины,
Рассмотрим движение изображающей точки на плоскости X(x1,x2), происходящее в соответствии с уравнениями (2.84). Прямая S, заданная в Х уравнением
(2.88)
делит фазовую плоскость на области X1 и Х2 , в каждой из которых управление и принимает значение и соответственно. На прямой S в силу (2.86) функция управления скачком меняет свое значение с u1 на u2 (или наоборот).
Пусть при и = и1 корни характеристического уравнения системы (2.84) комплексны. Обозначим их через . Для определенности рассмотрим случай . Тогда в области X1 фазовые траектории представляют собой дуги скручивающихся спиралей (рис. 1.14, в).
Если при и = u2 корни характеристического уравнения системы (2.84) действительные, но разных знаков, то в области Х2 фазовая плоскость X будет заполнена семейством кривых гиперболического типа (рис. 1.14, к).
В момент, когда управление и скачкообразно меняет свое значение, согласно уравнениям (2.84) координата х2 претерпевает разрыв, так как в момент разрыва управления и импульсная функция должна быть и в левой части последнего уравнения системы (2.84). Следовательно, в момент tk , соответствующий к-му разрыву функции управления, величина . Необходимо отметить, что из-за неучтенных малых постоянных времени различных элементов системы изменение координаты х2 от до будет происходить не мгновенно, а в течение достаточно малого интервала времени. В дальнейшем при исследовании систем подобного вида будем придерживаться следующей гипотезы: будем предполагать, что время изменения величины х2 от x2(tk-0) до х2(tk+0) меньше времени срабатывания переключающего устройства, которое меняет структуру системы.
Эта гипотеза позволяет провести анализ движения системы (2.84), если все неучтенные постоянные времени достаточно малы. При таком предположении можно считать, что координата х2 в момент разрыва управления скачком меняет свое значение. Тогда для определения решения исходной системы (2.84) необходимо знать не только начальные значения функций х1 , х2, но и величины их разрывов [1].
Из сказанного можно сделать вывод, что для систем, уравнения движения которых содержат производные от входных воздействий, скачкообразное изменение структуры управляющего устройства приводит к тому, что фазовые траектории в пространстве координат системы претерпевают разрывы. Для того чтобы выяснить особенности движения, вытекающие непосредственно из наличия скачков по координате х2, введем некоторые новые непрерывные фазовые координаты, однозначно характеризующие состояние системы. Другими словами, вместо фазовой плоскости X введем новую фазовую плоскость Г:
Г=(γ1,γ2),
где причём координата связана с координатой x1 соотношением
(2.89)
Уравнение движения системы (2.84) – (2.87) в этих новых координатах имеют вид
(2.90)
(2.91)
(2.92)
(2.93)
(2.94)
Из уравнений (2.91), (2.92) следует, что на фазовой плоскости Г существуют две прямые переключения для управления и : S (заданная уравнением S=0) и Е (заданная уравнением σ = 0).
Согласно (2.90) - (2.92) координаты γ1 и γ2 являются непрерывными функциями времени. Они связаны с исходными координатами x1 и х2 взаимно однозначной зависимостью:
(2.95)
(2.96)
Заметим, что из соотношений (2.95) и (2.96) немедленно определяется величина скачка по координате х2 в момент tk разрыва управления. Действительно, согласно (2.95), γ1 и γ2 - непрерывные функции времени. Это означает, что правые части уравнений (2.95) и (2.96) также должны быть непрерывны, поэтому
(2.97)
Выражение (2.93) определяет s как линейную комбинацию γ1, γ2 скачкообразно меняющимися коэффициентами. Обозначим функцию
(2.98)
Следовательно, на плоскости (γ1,γ2) прямая переключения S занимает одно из двух возможных положений: S1 (определяемое уравнением s1=0) или S2 (определяемое уравнением s2=0).
Как следует из (2.92), величина Ψ однозначно определяется лишь при s1s2 > 0, так как
(2.99)
(2.100)
Если координаты системы γ1,γ2 таковы, что s1σ>0 и s1σ<0, то величина Ψ может быть равной как , так и .
Действительно,
(2.101)
В случае, если одновременно выполняются условия
s1σ< 0 и s1σ> 0 (2.102)
Действительно, предположим, что и s1σ <0 (рис. 2.11, точка Р). Тогда в силу (2.92) должно произойти переключение управления, и величина Ψ принимает значение Ψ=β. Напомним, что в этот момент координата х2 за короткий интервал времени изменит свое значение от х2(tk - 0) до x2(tk + 0), причем, согласно сделанной гипотезе в этом интервале времени, структура управляющего устройства не может измениться. Заметим, что на плоскости (γ1,γ2) прямая переключения S займет положение S2, так как, согласно (2.98), при Ψ=β функция s=s2 (рис. 2.11). Это означает, что при Ψ=β произведение s2σ > 0. Из (2.98) следует, что движение в системе со значением Ψ=β в этом случае невозможно, т. е. структура системы должна измениться, и величина Ψ=α. Но как только Ψ=α, функция s = s1 и s1σ <0.
Рис. 2.11.
Далее следует провести все рассуждения сначала. Аналогичными рассуждениями можно показать, что если Ψ=β и s1σ <0 (точка М рис. 2.11), то в области s1σ <0 и s2σ > 0 невозможна ни одна из двух исходных линейных структур. Поэтому в системе при выполнении условий (2.102) происходит непрерывное изменение структуры и возникает скользящий режим.
Изменение фазовых координат γ1 и γ2 для случая (2.102) описывается уравнениями
(2.103)
δ - некоторая непрерывная функция координат системы, равная отношению времени движения в скользящем режиме при Ψ=α ко времени движения при Ψ=β.
Система дифференциальных уравнений (2.103) совпадает с (2.90), если принять величину Ψ соответственно равной θ. Иначе говоря, в системах, предполагающих дифференцирование входных воздействий, движение в скользящем режиме возможно в некоторой области фазовой плоскости Г (а следовательно, и X). Это существенное отличие рассматриваемых в настоящем параграфе систем, обусловленное наличием скачков по координате х2. Отметим, что в исследуемой системе, кроме скользящих движений типа (2.103), может возникнуть движение изображающей точки в скользящем режиме по одной из границ S1 или S2, так как на каждой из этих границ, согласно (2.90) - (2.96), управление скачком меняет свое значение.
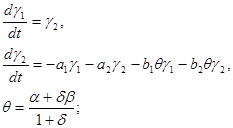
С геометрической точки зрения условия (2.99) - (2.102) означают, что плоскость разбивается на несколько областей.
В области s1,s2>0 величина Ψ=α, а характеристическое уравнение системы (2.90) совпадает с характеристическим уравнением системы (2.84) при и = u1 . Выше мы уже отмечали, что при Ψ=α корни характеристического уравнения комплексны. Поэтому в области I (рис. 2.12), где выполняются условия (2.99), фазовые траектории представляют собой дуги спиралей.
В силу условий (2.100) величина Ψ=β и характеристическое уравнение системы (2.90) совпадает с характеристическим уравнением системы (2.84) при u=u2
Выше уже отмечалось, что его корни действительные, но разных знаков, т. е. в области II (рис. 2.12) траекториями изображающей точки будут кривые семейства гипербол.
Если параметры системы обеспечивают выполнение соотношений (2.101), то в области III (рис. 2.12) изображающая точка будет двигаться то по дуге спирали, то по дуге гиперболы.
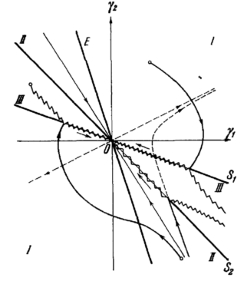
Как было указано ранее, в случае одновременного выполнения условий (2.102) имеет место движение в скользящем режиме, характеризуемое законом (2.103). В области скользящего режима III (рис. 2.13) в зависимости от знака θ фазовыми траекториями могут быть дуги спиралей или гипербол (рис. 2.13). В областях I и II (рис. 2.13) выполняются условия (2.99) и (2.100) соответственно.
Рис. 2.12.
В том случае, когда в окрестности границы разрыва S1 или S2 фазовые траектории направлены навстречу друг другу, возможно движение изображающей точки в скользящем режиме по каждой из указанных выше границ.
Рис. 2.13 наглядно иллюстрирует этот факт. В окрестности прямой S1, например, фазовые траектории, которые являются в области I спиралями (Ψ=α), а в области III - иперболами, направлены навстречу друг другу. Поэтому в системе, начиная с некоторого момента времени, возникает движение по s1. Из уравнений (2.103) и (2.93) очевидно, что движение в скользящем режиме, в отличие от систем типа (2.21), всегда зависит от коэффициентов аi ,bi.
Рис. 2.13.
Таким образом, фазовая плоскость Г системы (2.127) разбивается на несколько областей:
а) две области, в каждой из которых движение системы характеризуется неизменной структурой;
б) область, где имеет место скользящий режим, характеризуемый непрерывным изменением структуры системы;
в) область, в которой движение системы характеризуется любой из двух возможных структур.
Кроме того, может существовать движение в скользящем режиме и по границам областей s1=0 и s2=0.
Все сказанное достаточно наглядно поясняет особенности структуры фазовой плоскости Г системы (2.90). Для перехода к исходным переменным x1 и x2 , очевидно, следует воспользоваться соотношением (2.89).
Даже на основе проведенного анализа системы второго порядка можно сделать вывод о том, что методы синтеза управляющего устройства в системах автоматического управления объектами, дифференциальные уравнения которых содержат производные от входных воздействий заслуживают специального рассмотрения.
В случае, когда поведение системы управления определялось непрерывными координатами, для получения желаемой реакции системы на входную величину мы широко использовали скользящие режимы. Напомним, что при этом исходными предпосылками являлись непрерывность фазовых траекторий в пространстве х1,..., хп и фиксированное положение гиперплоскости переключения. Попытаемся и в рассматриваемом случае использовать тот же самый подход, т. е. так выбрать функцию управления, чтобы в системе возникали скользящие движения, свойства которых, не зависят от характеристик ее неизменяемой части.
В дальнейшем вместо уравнения (2.81) n-ro порядка будем исходить на системы п дифференциальных уравнений первого порядка
(2.104)
- символ дифференцирования.
Согласно изложенному выше для возникновения скользящего режима величина должна претерпевать разрывы первого рода. Непосредственно из рассмотрения уравнений (2.104) следует, что это условие выполняется, если управление и является непрерывной функцией времени и непрерывно дифференцируемой по времени т-2 раза, a m-1-я его производная претерпевает разрывы первого рода. Опишем один из возможных способов реализации такого управления (рис. 2.14).
Рис. 2.14.
С выхода объекта на вход формирующего устройства (ФУ), принадлежащего управляющему устройству, по каналу обратной связи поступает выходная величина φ=x объекта управлении. В состав формирующего устройства включаются дифференциаторы, осуществляющие дифференцирование сигнала хл и ключевые логические элементы, которые в соответствии с выбранным законом меняют структуру управляющего устройства. Пусть выходная координата υ формирующего устройства имеет вид
(2.105)
(2.106)
(2.107)
Очевидно, что формирующее устройство, которое реализует логическую функцию (2.105)-(2.107), по структуре совпадает с управляющим устройством, представленным на рис. 2.4. Разница заключается лишь в том, что на блок изменения структуры (БИС) должна поступать информация не о sgnх2, а о sgns. С выхода формирующего устройства скачкообразно меняющаяся величина υ подается на вход фильтра (Ф). Фильтр состоит из т-1 последовательно соединенных инерционных звеньев с выходными координатами zl,...,zm-1 Его движение описывается уравнениями
(2.108)
все Тi — постоянные величины, z0 = υ, zm-1 = u - управляющее воздействие (выходная величина УУ).
Из уравнений (2.105)-(2.108) ясно, что схема управляющего устройства, изображенная на рис. 2.14, вырабатывает на выходе непрерывное и непрерывно дифференцируемое по времени m-2 раза управление и, причем его (m-1)-я производная претерпевает разрывы первого рода.
Ниже везде будем предполагать, не оговаривая этого специально, что для объектов, уравнения движения которых, содержат операторы дифференцирования перед управлением, всегда используется указанный класс управления.
При выбранной структуре управляющего устройства фазовое состояние системы характеризуется переменными х1...,хn, z1,…zm-1 (предполагается, что движение неизменяемой части системы -исполнительного устройства и управляемого объекта - описывается уравнением (2.104)).
В силу сделанных предположений уравнения движения системы регулирования (рис. 2.14) имеют вид
(2.109)
υ определяется согласно (2.105) — (2.107).
После несложных преобразований величина (2.109) может быть записана в форме
(2.110)
Здесь
(2.111)
Поскольку в (2.166) величина υ скачком меняет свое значение на гиперплоскости S, заданной в пространстве х1...,хn, z1,…zm-1 уравнением , а фазовые координаты системы непрерывны, то в рассматриваемом случае возможно движение изображающей точки по S в скользящем режиме [12].
Напомним, что гиперплоскость S будет гиперплоскостью скольжения, если для любой её точки выполнены условия (2.27). Для точек на S (т. е. ) величина , согласно (2.109), (2.110), (2.105-2.107), определяется выражением
(2.112)
Отсюда получаем необходимые и достаточные условия существования гиперплоскости скольжения:
(2.113)
Таким образом, для системы (2.104) параметры управляющего устройства, т. е. величины α, β, Тi ,сi следует выбрать так, чтобы удовлетворялись условия (2.113). Тогда после возникновения скользящего режима закон изменения координат x1,..,xn будет определяться коэффициентами c1,..., cn уравнения гиперплоскости S. В ряде случаев соответствующим выбором этих коэффициентов можно получить требуемые динамические показатели движения в скользящем режиме. Такой метод синтеза имеет довольно очевидную физическую сущность. Действительно, можно показать, что оператор связи между величинами υ и и (рис. 2.14) совпадает с оператором P(D) в (2.109). Поэтому, если S является гиперплоскостью скольжения, то исходная система дифференциальных уравнений (2.109) распадается на две независимые системы
(2.114)
(причем в силу (2.105)-(2.107) υ не зависит от zi) и систему (2.108), характеризующую состояние фильтра Ф.
Нетрудно убедиться, что система (2.114) совпадает с (2.34), а первая группа условий (2.113) - с (2.45), (2.46). Однако в отличие от (2.34) для суждения о работоспособности системы (2.109) необходимо выяснить закон изменения величин zl,…zm-1 при движении изображающей точки по гиперплоскости S. Так как в скользящем режиме траектории движения изображающей точки принадлежат гиперплоскости скольжения (s≡0), то величина
(2.115)
С учетом (2.109) и (2.107) равенство (2.115) перепишется в виде
(2.116)
Из (2.116) следует, что описанный способ управления может быть использован, если решение (2.116) устойчиво. В противном случае, несмотря на то, что
(2.117)
может оказаться, что
(2.118)
и физические ограничения, существующие в любой реальной системе, не позволят использовать этот метод управления на практике. Представляет интерес сравнение систем (2.34) и (2.114) с точки зрения информации о состоянии регулируемого объекта, используемой в процессе управления. В случае (2.34) состояние управляемого процесса характеризуется величинами х1...,хn . Введение фильтра Ф в контур управления приводит к тому, что поведение системы (2.114) полностью определяется координатами х1...,хn, zl,…zm-1, т. е. количество информации, необходимое для построения системы регулирования, увеличилось. Однако этот факт не приводит к существенным затруднениям, так как информация о координатах zl,…zm-1 (выходных координатах инерционных звеньев) всегда имеется в нашем распоряжении.

 (2.81)
(2.81) ); ai,bi – постоянные параметра объекта; x - сигнал ошибка, u-управление.
); ai,bi – постоянные параметра объекта; x - сигнал ошибка, u-управление. (или
(или  ) необходимость дифференцирования входных управляющих воздействий не приводит к качественно новым явлениям в поведении системы. Но в системах с кусочно-непрерывным законом управления (2.35) - (2.37) необходимость дифференцирования управления приводит к ряду особенностей, не наблюдаемых ранее.
) необходимость дифференцирования входных управляющих воздействий не приводит к качественно новым явлениям в поведении системы. Но в системах с кусочно-непрерывным законом управления (2.35) - (2.37) необходимость дифференцирования управления приводит к ряду особенностей, не наблюдаемых ранее.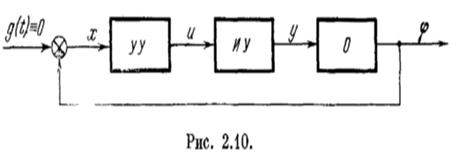
 (2.82)
(2.82) - постоянные коэффициенты, х – ошибка
- постоянные коэффициенты, х – ошибка (2.83)
(2.83) .
. (2.84)
(2.84) постоянные,
постоянные,  - символ дифференцирования.
- символ дифференцирования.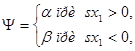 (2.86)
(2.86)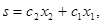 (2.87)
(2.87) постоянные величины,
постоянные величины, 
 (2.88)
(2.88) и
и  . Для определенности рассмотрим случай
. Для определенности рассмотрим случай  . Тогда в области X1 фазовые траектории представляют собой дуги скручивающихся спиралей (рис. 1.14, в).
. Тогда в области X1 фазовые траектории представляют собой дуги скручивающихся спиралей (рис. 1.14, в). . Необходимо отметить, что из-за неучтенных малых постоянных времени различных элементов системы изменение координаты х2 от
. Необходимо отметить, что из-за неучтенных малых постоянных времени различных элементов системы изменение координаты х2 от  до
до  будет происходить не мгновенно, а в течение достаточно малого интервала времени. В дальнейшем при исследовании систем подобного вида будем придерживаться следующей гипотезы: будем предполагать, что время изменения величины х2 от x2(tk-0) до х2(tk+0) меньше времени срабатывания переключающего устройства, которое меняет структуру системы.
будет происходить не мгновенно, а в течение достаточно малого интервала времени. В дальнейшем при исследовании систем подобного вида будем придерживаться следующей гипотезы: будем предполагать, что время изменения величины х2 от x2(tk-0) до х2(tk+0) меньше времени срабатывания переключающего устройства, которое меняет структуру системы. причём координата
причём координата  связана с координатой x1 соотношением
связана с координатой x1 соотношением (2.89)
(2.89) (2.90)
(2.90) (2.91)
(2.91) (2.92)
(2.92) (2.93)
(2.93) (2.94)
(2.94) (2.95)
(2.95) (2.96)
(2.96) (2.97)
(2.97) (2.98)
(2.98) (2.99)
(2.99) (2.100)
(2.100) , так и
, так и  .
. (2.101)
(2.101) и s1σ <0 (рис. 2.11, точка Р). Тогда в силу (2.92) должно произойти переключение управления, и величина Ψ принимает значение Ψ=β. Напомним, что в этот момент координата х2 за короткий интервал времени изменит свое значение от х2(tk - 0) до x2(tk + 0), причем, согласно сделанной гипотезе в этом интервале времени, структура управляющего устройства не может измениться. Заметим, что на плоскости (γ1,γ2) прямая переключения S займет положение S2, так как, согласно (2.98), при Ψ=β функция s=s2 (рис. 2.11). Это означает, что при Ψ=β произведение s2σ > 0. Из (2.98) следует, что движение в системе со значением Ψ=β в этом случае невозможно, т. е. структура системы должна измениться, и величина Ψ=α. Но как только Ψ=α, функция s = s1 и s1σ <0.
и s1σ <0 (рис. 2.11, точка Р). Тогда в силу (2.92) должно произойти переключение управления, и величина Ψ принимает значение Ψ=β. Напомним, что в этот момент координата х2 за короткий интервал времени изменит свое значение от х2(tk - 0) до x2(tk + 0), причем, согласно сделанной гипотезе в этом интервале времени, структура управляющего устройства не может измениться. Заметим, что на плоскости (γ1,γ2) прямая переключения S займет положение S2, так как, согласно (2.98), при Ψ=β функция s=s2 (рис. 2.11). Это означает, что при Ψ=β произведение s2σ > 0. Из (2.98) следует, что движение в системе со значением Ψ=β в этом случае невозможно, т. е. структура системы должна измениться, и величина Ψ=α. Но как только Ψ=α, функция s = s1 и s1σ <0.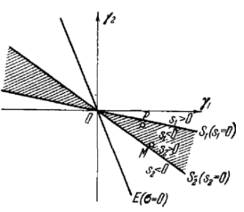
 (2.103)
(2.103)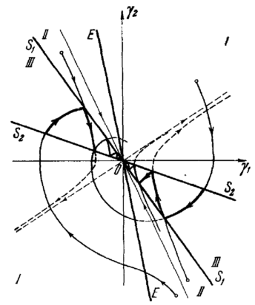
 (2.104)
(2.104) должна претерпевать разрывы первого рода. Непосредственно из рассмотрения уравнений (2.104) следует, что это условие выполняется, если управление и является непрерывной функцией времени и непрерывно дифференцируемой по времени т-2 раза, a m-1-я его производная претерпевает разрывы первого рода. Опишем один из возможных способов реализации такого управления (рис. 2.14).
должна претерпевать разрывы первого рода. Непосредственно из рассмотрения уравнений (2.104) следует, что это условие выполняется, если управление и является непрерывной функцией времени и непрерывно дифференцируемой по времени т-2 раза, a m-1-я его производная претерпевает разрывы первого рода. Опишем один из возможных способов реализации такого управления (рис. 2.14).
 (2.105)
(2.105) (2.106)
(2.106) (2.107)
(2.107) (2.108)
(2.108)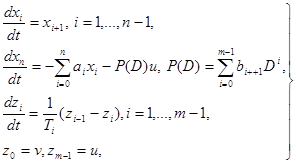 (2.109)
(2.109) (2.110)
(2.110)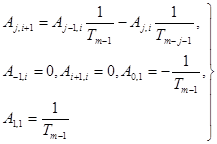 (2.111)
(2.111) , а фазовые координаты системы непрерывны, то в рассматриваемом случае возможно движение изображающей точки по S в скользящем режиме [12].
, а фазовые координаты системы непрерывны, то в рассматриваемом случае возможно движение изображающей точки по S в скользящем режиме [12]. ) величина
) величина  , согласно (2.109), (2.110), (2.105-2.107), определяется выражением
, согласно (2.109), (2.110), (2.105-2.107), определяется выражением (2.112)
(2.112)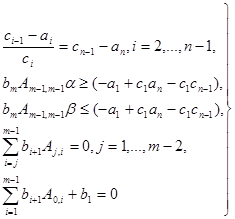 (2.113)
(2.113)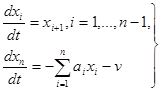 (2.114)
(2.114) (2.115)
(2.115) (2.116)
(2.116) (2.117)
(2.117) (2.118)
(2.118)