Простейшие примеры систем с переменной структурой. Режимы в системах с переменной структурой
Прежде чем приступить к изложению основных идей и принципов построения систем с переменной структурой приведем несколько простейших примеров таких систем, которые позволят получить первые представления о подходе к синтезу управляющего устройства в СПС.
Рассмотрим в качестве одного из примеров задачу об устойчивости свободного движения в системе автоматического регулирования второго порядка. Как известно, в линейной системе устойчивость всегда можно гарантировать, если управление составить в виде линейной комбинации координаты ошибки и ее производных с соответствующими коэффициентами воздействия. Однако при реализации такого управления может оказаться затруднительным получение точных значений производных. В ряде случаев сравнительно простыми техническими средствами удается получить информацию о знаке производной от сигнала ошибки или о знаке линейной комбинации ошибки и ее производной. В связи с этим представляет интерес задача построения устойчивой системы с использованием такой неполной информации о её состоянии.
Будем решать эту задачу для системы автоматического управления, представленной на рис. 2.1. Объектом управления является интегрирующее звено с постоянное интегрирования а', исполнительным устройством - интегрирующий сервомотор с постоянной интегрирования а". Предположим, что задающее и возмущающее воздействия g(t) и f(t) являются постоянными. Тогда уравнение движения системы относительно координаты ошибки х записывается в виде
(2.1)
где .
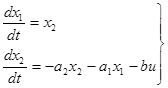
Введем обозначения и в дальнейшем вместо (2.1) будем рассматривать систему дифференциальных уравнений
(2.2)
Как уже отмечалось выше, для формирования функции управления и мы располагаем информацией о величине ошибки х1 и
Рис. 2.1
знаке её первой производной sgn x2. Следовательно, при построении линейной системы управляющее воздействие должно иметь вид
. (2.3)
Очевидно, что при любых значениях а система (2.2) либо находится на границе устойчивости (α>0), либо неустойчива (α<0). Таким образом, в рамках фиксированной линейной структуры не удается решить поставленную задачу об устойчивости движения.
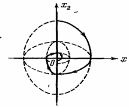
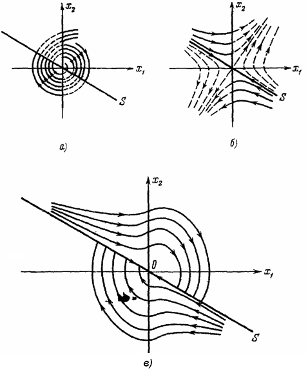
Предположим теперь, что в управляющем устройстве предусмотрена возможность изменения структуры системы, причем в зависимости от ее состояния в любой момент времени имеет место один из двух линейных структур. Тогда выходная величина управляющего устройства равна либо , либо , , - постоянные величины. Для того чтобы определить такую последовательность изменения структуры системы, при которой обеспечивается устойчивость, воспользуемся методом «сшивания» фазовых траекторий. Фазовые портреты каждой из используемых структур представлены на рис. 2.2, а, б. На анализе фазовых портретов можно заметить, что если в первом и третьем квадрантах фазовой плоскости (х1 х2) имеют место траектории, соответствующие первой структуре (рис. 2.2, а), а во втором и четвертом - второй структуре, то изображающая точка, двигаясь из любого начального положения по участкам неустойчивых траекторий (рис. 2.3), будет асимптотически приближаться к началу координат.
Рис. 2.2
В итоге мы получили желаемый фазовый портрет системы, обладающей двумя различными структурами. Непосредственно из рассмотрения этого фазового портрета следует закон изменения
Рис. 2.3
структуры и необходимая для его реализации информация. Действительно, структура системы, согласно рис. 2.3, должна меняться при изменении знаков координат х1 и x2 , причем если х1 х2> 0, то выходная величина управляющего устройства должна быть равной αx1 ,а если x1x2<0, то выходная величина управляющего устройства должна быть равной . Следовательно, синтезированный методом фазовой плоскости закон управления должен иметь вид
(2.4)
(2.5)
Очевидно, что логический закон (2.4), (2.5) может быть реализован, так как в управляющее устройство предлагаемой системы с переменной структурой должна поступать информация о величине ошибки х1 и о знаке ее производной x2 . Согласно сделанному выше предположению эта информация имеется в нашем распоряжении.
Само управляющее устройство (рис. 2.4), которое реализует закон (2.4), (2.5), должно содержать ключевой элемент (КЭ), блок изменения структуры (БИС) и сумматор. БИС на основе информации о величине х1 и sgn x2 дает команду на переключение ключевого элемента. Ключевой элемент в зависимости от выходного сигнала БИС может менять свое состояние, меняя тем самым коэффициент воздействия по сигналу ошибки. Поэтому в зависимости от состояния системы выходная величина сумматора будет равна либо , либо , в результате чего будет изменяться структура системы.
Подводя итог сказанному, можно сделать вывод, что в рассматриваемом случае в системе с переменной структурой удается получить свойство устойчивости движения с использованием такой информации, которая была недостаточна для стабилизации линейной системы. Таким образом, за счет сочетания линейных структур в системе с переменной структурой удается получить новые свойства, не присущие каждой из исходных структур.
Рис. 2.4
Рассмотрим теперь другую задачу, относящуюся опять-таки к вопросам стабилизации линейного объекта с постоянными параметрами с использованием ограниченной информации о состоянии системы.
Предположим, что источники информации позволяют получить информацию о величине ошибки и о знаке определенной линейной комбинации ошибки и её производной. Требуется выбрать структуру и значения параметров управляющего устройства в случае, когда неизменяемая часть системы описывается дифференциальным уравнением второго порядка общего вида
или с учётом введенных обозначений,
(2.6)
где a1,a2,b1 – постоянные величины, b>0. Для различных управляемых процессов коэффициенты a1 и a2 могут оказаться такими, что при имеющейся информации за счёт линейного закона управления не удается обеспечить даже устойчивости движения, не говоря уже о качественных показателях процесса управления. Действительно, если в (2.6) управление и пропорционально ошибке, а коэффициент , то характеристическое уравнение для (2.6) всегда будет иметь, по крайней мере, один корень в правой полуплоскости. Решим задачу об устойчивости движения в этом случае, по-прежнему комбинируя линейные структуры, т. е. считая, что управление и имеет вид (2.4). Задача синтеза состоит в выборе каждой из структур (или значений коэффициентов и ) непоследовательности их изменения. Осуществим синтез закона управления методом фазовой плоскости. С этой целью обратимся к фазовым портретам линейных систем второго порядка. Выберем одну из структур таким образом, чтобы на её фазовой плоскости существовала траектория, соответствующая устойчивому вырожденному движению. Пусть эта структура имеет место при . Из характеристического уравнения системы следует, что такое всегда найдется. Тогда фазовый портрет системы будет иметь вид, представленный на рис. 1.20, з. Во втором и четвертом квадрантах плоскости (х1, х2) расположена траектория с устойчивым движением, которая является прямой с угловым коэффициентом , равным отрицательному корню характеристического уравнения. Воспользуемся этой особенностью линейной структуры для построения устойчивой СПС. Выберем вторую линейную структуру таким образом, чтобы корни характеристического уравнения были комплексными. Очевидно, что такое всегда найдется. Пусть вторая структура также неустойчива и её фазовый портрет представлен на рис. 1.20, д. Из анализа фазовых портретов обеих структур следует метод получения желаемого фазового портрета системы с переменной структурой. Разобьем фазовую плоскость (x1,x2) (Рис. 2.5) на две области, границами которых являются прямые x1 =0 и прямая S, заданная уравнением,
(2.7)
которая является траекторией с устойчивым движением для одной из структур. Если состояние системы таково, что изображающая точка находится в области x1s>0, то необходимо обеспечить её движение по раскручивающимся спиралям, если в области x1s<0 - по кривым гиперболического типа. Изображающая точка, двигаясь из любого начального положения по участкам неустойчивых траекторий, всегда попадает на прямую S*) (из области x1s>0 - за один интервал, из области x1s<0 - за два интервала) и затем, двигаясь по S, асимптотически приближается к началу координат. В итоге, как и в первом случае, мы получим желаемый фазовый портрет системы с переменной структурой. Аналогичными рассуждениями мы можем определить закон изменения структуры и необходимую для его реализации информацию. Этот закон должен иметь вид
, (2.8)
Где
(2.9)
Рис. 2.5
Напомним, что коэффициенты выбираются таким образом, чтобы линейная структура, соответствующая , была колебательной, а линейная структура, соответствующая , имела устойчивое вырожденное движение. Коэффициент , характеризующий скорость затухания этого устойчивого движения, определяет величину s в логическом законе (2.8) изменения структуры.
Как видно из (2.8), для реализации синтезированного закона управления необходима информация о величине ошибки и о знаке линейной комбинации ошибки и ее производной. Логический закон (2.8) аналогичен закону (2.4), (2.5). Различие заключается лишь в том, что в (2.8) вместо sgn x2 используется информация о величине sgn s. Поэтому для реализации логического закона (2.8) можно воспользоваться управляющим устройством с переменной структурой, представленным на рис. 2 4.
Таким образом, в классе систем с переменной структурой удается обеспечить устойчивость системы второго порядка без введения воздействий по производной на вход неизменяемой части системы. Существенно, что для каждой из линейных структур системы с переменной структурой удаётся отказаться от требования устойчивости их траекторий. Заметим, что рассмотренный пример позволяет отметить одну качественную особенность систем с переменной структурой. Выясним, какими средствами достигается увеличение быстродействия СПС. В линейной системе решение этой задачи может потребовать увеличения коэффициента воздействия одновременно по ошибке и по ее производной. В системе с переменной структурой достаточно увеличить лишь коэффициент воздействия по ошибке. Пусть при заданных и переходный процесс характеризуется фазовой траекторией 1 (рис. 2.6). Выберем . Новым значениям этих параметров соответствует фазовая траектория 2 (рис. 2.6). Очевидно, что время протекания второго процесса будет меньше, так как для любого х абсолютная величина скорости изменения координаты ошибки на траектории 2 больше, чем на траектории 1. Следует при этом иметь в виду, что увеличение приводит к увеличению в (2.7). Поэтому в (2.9) нужно либо увеличить , либо коэффициент перед х2 сделать меньше единицы.
Таким образом, вопрос о повышении быстродействия системы с переменной структурой решается за счет увеличения коэффициента воздействия только по координате ошибки.
Рис. 2.6
Предложенный метод синтеза СПС с использованием устойчивых вырожденных движений пригоден для любой системы второго порядка с постоянными параметрами.
Второй пример, который будет рассмотрен, относится к задаче построения системы регулирования при ограниченных коэффициентах передачи в каналах управляющего устройства.
Для ряда технологических процессов, подлежащих автоматизации, в силу каких-либо условий могут быть ограничены уровни воздействий по различным координатам системы. Эта задача заслуживает специального рассмотрения даже в том случае, когда имеется полная информация о состоянии системы. Очевидно, что ограничения на коэффициенты воздействий по координатам системы накладывают определенные ограничения и на ее качественные показатели. В дальнейшем рассмотрим один из важнейших качественных показателей системы с ограниченными уровнями воздействий - её быстродействие.
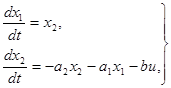
Пусть система второго порядка с постоянными коэффициентами описывается системой дифференциальных уравнений
(2.10)
a1,a2,b – постоянные величины, b>0
Предполагается, что для формирования управления u может быть использована информация о величинах ошибки x1 и ее производной х2, но коэффициенты воздействий по этим координатам ограничены соответственно величинами и . В этих условиях при построении линейной системы управляющее воздействие может быть выбрано в виде
(2.11)
где k1,k2 – постоянные и ограниченные величины
. (2.12)
Будем считать, что
(2.13)
Тогда в линейной системе всегда можно обеспечить устойчивость движения. В то же время необходимо отметить, что в линейной системе использование предельных значений коэффициентов воздействий по ошибке и ее производной может оказаться невозможным, так как для достижения требуемых динамических свойств системы эти коэффициенты должны быть связаны определёнными соотношениями.
В силу ограничений (2.12) корни характеристического уравнения линейной системы не могут быть выбраны произвольно. Именно этим и обусловлено ограничение её быстродействия.
Предположим теперь, что имеется совокупность линейных структур, каждая из которых определяется некоторым управлением вида (2.11), причем для любой из структур выполняются ограничения (2.12). Пусть в управляющем устройстве системы предусмотрен элемент логического типа, который в зависимости от состояния управляемого процесса выбирает ту или иную линейную структуру.
Рассмотрим, какие дополнительные возможности увеличения быстродействия имеются в такой системе с переменной структурой.
Выберем управление в виде
(2.14)
Коэффициенты и могут соответственно принимать два предельных значения: или , или . Всевозможные сочетания коэффициентов , , , определяют совокупность имеющихся фиксированных структур. Очевидно, что в рассматриваемом случае мы располагаем четырьмя линейными структурами. Определим последовательность их изменения. С этой целью рассмотрим фазовые портреты каждой линейной структуры. Если и , и при этом корни характеристического уравнения системы (2.10) действительны, то в силу (2.13) фазовый портрет системы имеет вид, представленный на рис. 1.20, а. Для линейной структуры и корни характеристического уравнения системы (2.10) действительные и положительные. Фазовый портрет системы в этом случае представлен на рис. 1.20, е. Последние две структуры имеют аналогичные фазовые портреты. При и фазовый портрет системы (2.10) изображен на рис. 1.20, к, а при и - на рис. 1.20, з. Обе эти структуры являются неустойчивыми, но обладают устойчивыми вырожденными движениями. Поэтому синтез системы с переменной структурой проведём на основе метода, предполагающего использование устойчивых вырожденных движений. Как видно из фазовых портретов рис. 1.20, з, к, две последние структуры близки по своим динамическим свойствам. Поэтому одну из них можно исключить из рассмотрения. Остановим свой выбор на структуре и , так как соответствующее ей устойчивое вырожденное движение рис. 1.20, к происходит с большими скоростями, что является существенным с точки зрения быстродействия системы.
Итак, для построения системы с переменной структурой будем использовать три линейные структуры с фазовыми портретами рис. 1.20, а, е, к, причем на прямой, соответствующей устойчивому вырожденному движению (рис. 1.20, к) будем осуществлять изменение структуры системы. Выбранный нами метод построения СПС предполагает попадание изображающей точки из любого начального положения на эту прямую. Напомним, что её уравнение имеет вид.
(2.15)
где - отрицательный действительный корень характеристического уравнения для третьей структуры.
Совершенно очевидно, что в первом и третьем квадрантах плоскости (х1,х2) из трёх имеющихся структур приемлема лишь правая структура (область I на рис. 2.7, а), т.е.
(2.16)
Рис. 2.7.
В секторах между прямой S(s=0) и осью х1 изображающая точка из любого начального положения будет двигаться к прямой S, если ее движение происходит по фазовым траекториям, соответствующим рис. 1.14, е (область II на рис. 2.7, б), т. е.
(2.17)
Наконец, после попадания изображающей точки на прямую S её дальнейшее движение будет происходить по S, если включится третья структура ( ). Пусть в секторах между прямой S и осью х2 движение изображающей точки происходит по фазовым траекториям этой структуры (область III на рис. 2.7, в), т. е.
(2.18)
Условия (2.16), (2.17), (2.18) полностью определяют движение системы. Из этих соотношений следует логический закон изменения структуры:
(2.19)
Из (2.19) Следует, что структура, соответствующая и , невозможна. Действительно, для этой структуры знаки величин х1 и х2 должны совпадать. Но при этом, согласно (2.15) и условию , знак величины s совпадает со знаками х1 и x2, и поэтому x1s >0 и x2s> 0, а для упомянутой структуры эти неравенства должны иметь противоположные знаки. Если изменение структуры будет происходить в соответствии с (2.14) и (2.19), то фазовый портрет устойчивой системы с переменной структурой будет иметь вид, представленный на рис. 2.7, г.
Сопоставим быстродействие синтезированной СПС с ограниченными коэффициентами воздействий и линейной системы, работающей в тех же условиях.
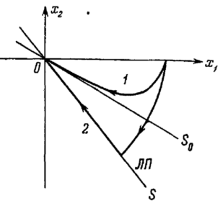
Предположим, что линейная система является апериодической и управление (2.11) обеспечивает максимальное быстродействие системы при выполнении ограничений (2.12). На фазовой плоскости (x1,x2) Для начальных условий переходному процессу в линейной системе соответствует траектория 1 (рис. 2.8). Касательной к этой траектории в начале координат является прямая S0 заданная уравнением
(2.20)
где - меньший по абсолютной величине отрицательный корень характеристического уравнения линейной системы
Построим для тех же начальных условий фазовую траекторию, характеризующую движение синтезированной системы с переменной структурой (кривая 2 на рис. 2.8). Отметим, что, во-первых, скорость изменения координаты х2 для системы с переменной структурой, равная и, больше по абсолютной величине, чем скорость изменения х2 для линейной системы, равная и, во-вторых,
Из этого следует, что траектория 2 будет лежать ниже траектории 1. Следовательно, в системе с переменной структурой переходные процессы протекают быстрее, чем в линейной системе. Существенно, что при построении СПС на коэффициенты воздействия по ошибке и её производной накладывались те же ограничения и использовалась та же информация, что и в линейной системе. Заметим, что в системе с переменной структурой удается обеспечить апериодический характер процесса управления и при этом использовать предельные значения коэффициентов воздействий в канале управления, в то время как в линейной системе может возникнуть противоречие между требованиями апериодичности процесса управления и необходимой статической точности (последнее приводит к максимальному воздействию по ошибке).
Рис. 2.8
Таким образом, при наличии ограничений на уровни воздействий в каналах управляющего устройства в классе систем с переменной структурой удается увеличить быстродействие по сравнению с линейной системой.
Поэтому СПС целесообразно использовать при автоматизации таких производственных процессов, в которых из-за каких-либо технических ограничений с помощью линейных систем не удается обеспечить требуемого быстродействия.
Режимы в системах с переменной структурой. Выше были рассмотрены простейшие примеры систем с переменной структурой, которые позволяют получить первые представления об этом классе систем. На этих примерах мы убедились, что изменение во время протекания процесса управления структуры системы в зависимости от выбранного алгоритма и имеющейся информации значительно расширяет возможности управления. Напомним коротко последовательность рассуждений, которая была проведена выше. При построении систем с ограниченной информацией о состоянии управляемого процесса, а также систем при наличии ограничений на уровни воздействий по различным координатам системы параметры управляющего устройства выбирались таким образом, чтобы по крайней мере одна из линейных структур имела устойчивое вырожденное движение. В момент попадания изображающей точки на фазовую траекторию, соответствующую устойчивому вырожденному движению, происходило переключение управления, т. е. замена одной линейной структуры на другую. В дальнейшем условимся называть прямую, на которой осуществляется изменение структуры системы, прямой переключения. Заметим, что для системы произвольного порядка вместо прямой переключения будем иметь гиперплоскость переключения. В рассмотренных выше примерах прямая переключения совпадала с фазовой траекторией устойчивого вырожденного движения. После попадания изображающей точки на прямую переключения структура системы уже не менялась. Движение такой системы при любых начальных условиях характеризуется конечным числом переключений, а финальная стадия переходного процесса описывается уравнением вырожденного движения одной из структур.
Однако из-за неточного знания параметров объекта, неточностей аппаратурной реализации вызванных нестабильностью характеристик элементов управляющего устройства и других технических причин не удается обеспечить изменение структуры системы строго в требуемые моменты времени. Поэтому в системах с переменной структурой могут возникать другие виды движения. Остановимся теперь на основных режимах движения, которые могут наблюдаться в этом классе систем.
Специфика всех видов движения может быть полностью выявлена и наглядно проиллюстрирована на примере системы второго порядка. В связи с этим рассмотрим систему с переменной структурой второго порядка, описываемую следующей системой дифференциальных уравнений.
(2.21)
(2.22)
(2.23)
(2.24)
- постоянные коэффициенты,
Согласно (2.23), (2.24) изменение структуры управляющего устройства происходит на прямых переключениях х1=0 и S, заданной на плоскости (х1, х2) уравнением s = 0.
Не нарушая общности рассуждений, можно для определенности считать, что при линейная структура (2.21) является колебательно неустойчивой (рис. 1.14, д), а при - апериодически неустойчивой (рис. 1.14, з). Для второй структуры существует устойчивое вырожденное движение, определяемое отрицательным корнем характеристического уравнения. В рассмотренных выше примерах коэффициент с, определяющий положение прямой переключения на фазовой плоскости (x1 ,х2), выбирался равным . Такой режим работы, при котором изменение структуры системы происходит па фазовой траектории, соответствующей устойчивому вырожденному движению (рис. 2.9, а), будем называть режимом работы с движением по вырожденным траекториям. В системе произвольного порядка такой режим возникнет в случае, если гиперплоскость переключения является совокупностью фазовых траекторий для одной из структур (см. (1.26)).
Предположим теперь, что угловой коэффициент с прямой переключения больше . Тогда устойчивая траектория линейной структуры, определяемая , будет целиком принадлежать, области I(x1,s>0) в которой движение изображающей точки происходит по раскручивающимся спиралям, соответствующим линейной структуре (рис. 2.9, б). В этом случае после попадания на прямую переключения S изображающая точка будет уходить от нее, двигаясь по кривым гиперболического типа. При изменении знака х1, произойдет смена структуры системы. Затем изображающая точка, двигаясь по раскручивающимся спиралям, вновь попадёт на прямую переключения S и т. д. Очевидно, что в линейной системе с некоторой конечной частотой будет изменяться и структура управляющего устройства. Такой режим работы системы будем называть режимом переключений. Как видно фазового портрета, при выбранном значении с система устойчива, положение равновесия достигается в колебательном режиме.
Осталось рассмотреть последний случай, когда угловой коэффициент с прямой переключения меньше . При таком соотношении параметров системы траектория, характеризующая устойчивое вырожденное движение, принадлежит области , рис. 2.9,в.) и фазовые траектории, а точнее говоря, векторы фазовых скоростей обеих структур, в точках прямой переключения оправлены к S. После попадания на S изображающая точка не может уйти от прямой переключения ни по одной из структур и будет двигаться вдоль S. При этом в системе с бесконечно большой частотой возникают переключения структуры с одной на другую. Такой режим работы, при котором на прямой переключения (а для системы произвольного порядка на гиперплоскости переключения) изменение структуры происходит с бесконечно большой частотой, будем называть скользящим режимом. Следует отметить, что прямая переключения не является фазовой траекторией ни для одной из линейных структур. Следовательно, за счёт скользящего режима удается получить искусственное вырожденное движение. В дальнейшем идея создания искусственных вырожденных движений за счет скользящих режимов будет широко применяться при синтезе систем с переменной структурой. Поэтому остановимся несколько подробнее на особенностях движения системы в скользящем режиме и условиях его возникновения.
Рис. 2.9.
Из того факта, что изображающая точка, попав на прямую переключения, уже не может сойти с неё и продолжает своё движение по ней, следует равенство нулю величины s в скользящем режиме, т. е.
(2.25)
Имея в виду, что величина ошибки х равна х1 , a dx/dt=x2, получаем из (2.25) дифференциальное уравнение движения системы в скользящем режиме относительно координаты ошибки:
(2.26)
Согласно (2.26) движение рассматриваемой системы в скользящем режиме описывается уже уравнением первого порядка, и, это особенно важно, это уравнение не зависит от параметров неизменяемой части системы. Выбирая соответствующим образом коэффициент с, мы можем наделить движение системы в скользящем режиме желаемыми свойствами. Например, для устойчивости точно выбрать с>0, а увеличивая с, можно повысить скорость затухания этого движения. Особенность скользящих движений, связанная с независимостью их от характеристик управляющего объекта и возможностью наделить их желаемыми свойствами, и обусловливает широкое использование в СПС этого вида изменения.
Финальная стадия процесса управления всегда будет протекать в скользящем режиме, если при выбранных линейных структурах управляющего устройства и при выбранной последовательности их изменения в любой точке прямой переключения S существует скользящий режим, а изображающая точка из любого начального положения попадает на S.
Условия существования скользящего режима на гиперплоскости можно получить, исходя из того, что в точках S векторы фазовых скоростей обеих структур должны быть направлены навстречу друг другу, либо должны принадлежать S.
Запишем условия существования скользящего режима в аналитической форме. Рассмотрим некоторую точку гиперплоскости S, в которой имеет место скользящий режим. Очевидно, изображающая точка не покинет гиперплоскость S в области s>0, если для s >0 будет такая структура, при которой величина s неположительна. Изображающая точка не покинет S в область s<0, если для s <0 будет такая структура, при которой величина s неотрицательна. Отсюда получаем условия, при выполнении которых на гиперплоскости S существует скользящий режим:
(2.27)
Заметим, что если в (2.27) пределы равны нулю для всех точек S, то в системе имеет место режим работы с движением по вырожденным траекториям.
Если неравенства (2.27) выполняются для любой точки гиперплоскости (прямой) переключения S, т. е. на всей S существует скользящий режим, то условимся называть в этом случае гиперплоскость (прямую) S гиперплоскостью (прямой) скольжения [5].
Покажем, как с помощью соотношений (2.27) для системы второго порядка можно выбрать две линейные структуры таким образом, чтобы на плоскости координат этой системы существовала прямая скольжения. Другими словами, поставим задачу отыскания таких значений , при которых в любой точке прямой переключения S(s = 0) выполняются неравенства (2.27).
Найдем величину
(2.28)
Согласно (2.21) и (2.22) вместо (2.28) имеем
(2.29)
Как уже отмечалось, условия существования скользящего режима должны выполняться в точках прямой S, т.е. для точек хг= -сх1 . Поэтому величина ds/dt определяется выражением
(2.30)
С учетом (2.30) неравенства (2.27) могут быть представлены в виде
(2.31)
Замечание. Неравенства (2.31) получены в предположении, что величина s=0. Здесь и в дальнейшем при выводе условий существования скользящего режима выражения «при s>0» и «при s<0» означают, что коэффициенты, определяющие структуру системы (в нашем случае ) должны принять значение, соответствующие s>0 и s<0.
Предположим, что х1>0 и, следовательно, согласно (2.23) . Очевидно, первое неравенство будет выполняться, если . Если же , то первое неравенство (2.31) выполняется для . Нетрудно заметить, что при этом второе неравенство (2.31) также будет всегда выполняться. В результате получаем условия, при которых прямая S является прямой скольжения:
(2.32)
При выполнении (2.32) после попадания на S изображающая точка будет двигаться по прямой переключения, так как в любой её точке существует скользящий режим. Но для того чтобы воспользоваться полезными свойствами скользящих движений, необходимо обеспечить попадание изображающей точки на прямую S из произвольного начального положения [2].
Итак, мы рассмотрели три основных режима работы систем с переменной структурой: режим работы с движением по вырожденным траекториям, режим переключений и скользящий режим. Первые два режима, как следует из приведенных выше примеров, могут быть достаточно эффективно использованы в различных задачах управления объектами с постоянными параметрами. При любого рода не идеальностях режим работы с движением по вырожденным траекториям может переходить либо в режим переключений, либо в скользящий режим. Скользящий режим обладает интересным свойством, которое выделяет его среди остальных режимов работы СПС. Речь идёт о свойстве независимости этого вида движения от характеристик неизменяемой части системы.

 (2.1)
(2.1) .
. и в дальнейшем вместо (2.1) будем рассматривать систему дифференциальных уравнений
и в дальнейшем вместо (2.1) будем рассматривать систему дифференциальных уравнений (2.2)
(2.2)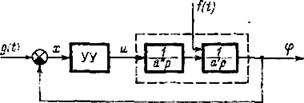

 . (2.3)
. (2.3) , либо
, либо  ,
,  ,
,  - постоянные величины. Для того чтобы определить такую последовательность изменения структуры системы, при которой обеспечивается устойчивость, воспользуемся методом «сшивания» фазовых траекторий. Фазовые портреты каждой из используемых структур представлены на рис. 2.2, а, б. На анализе фазовых портретов можно заметить, что если в первом и третьем квадрантах фазовой плоскости (х1 х2) имеют место траектории, соответствующие первой структуре (рис. 2.2, а), а во втором и четвертом - второй структуре, то изображающая точка, двигаясь из любого начального положения по участкам неустойчивых траекторий (рис. 2.3), будет асимптотически приближаться к началу координат.
- постоянные величины. Для того чтобы определить такую последовательность изменения структуры системы, при которой обеспечивается устойчивость, воспользуемся методом «сшивания» фазовых траекторий. Фазовые портреты каждой из используемых структур представлены на рис. 2.2, а, б. На анализе фазовых портретов можно заметить, что если в первом и третьем квадрантах фазовой плоскости (х1 х2) имеют место траектории, соответствующие первой структуре (рис. 2.2, а), а во втором и четвертом - второй структуре, то изображающая точка, двигаясь из любого начального положения по участкам неустойчивых траекторий (рис. 2.3), будет асимптотически приближаться к началу координат.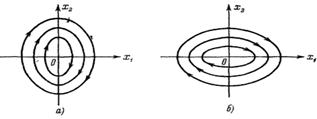
 (2.4)
(2.4)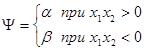 (2.5)
(2.5)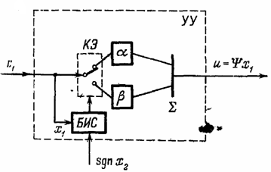

 (2.6)
(2.6) , то характеристическое уравнение для (2.6) всегда будет иметь, по крайней мере, один корень в правой полуплоскости. Решим задачу об устойчивости движения в этом случае, по-прежнему комбинируя линейные структуры, т. е. считая, что управление и имеет вид (2.4). Задача синтеза состоит в выборе каждой из структур (или значений коэффициентов
, то характеристическое уравнение для (2.6) всегда будет иметь, по крайней мере, один корень в правой полуплоскости. Решим задачу об устойчивости движения в этом случае, по-прежнему комбинируя линейные структуры, т. е. считая, что управление и имеет вид (2.4). Задача синтеза состоит в выборе каждой из структур (или значений коэффициентов  и
и  ) непоследовательности их изменения. Осуществим синтез закона управления методом фазовой плоскости. С этой целью обратимся к фазовым портретам линейных систем второго порядка. Выберем одну из структур таким образом, чтобы на её фазовой плоскости существовала траектория, соответствующая устойчивому вырожденному движению. Пусть эта структура имеет место при
) непоследовательности их изменения. Осуществим синтез закона управления методом фазовой плоскости. С этой целью обратимся к фазовым портретам линейных систем второго порядка. Выберем одну из структур таким образом, чтобы на её фазовой плоскости существовала траектория, соответствующая устойчивому вырожденному движению. Пусть эта структура имеет место при  . Из характеристического уравнения системы
. Из характеристического уравнения системы  следует, что такое
следует, что такое  всегда найдется. Тогда фазовый портрет системы будет иметь вид, представленный на рис. 1.20, з. Во втором и четвертом квадрантах плоскости (х1, х2) расположена траектория с устойчивым движением, которая является прямой с угловым коэффициентом
всегда найдется. Тогда фазовый портрет системы будет иметь вид, представленный на рис. 1.20, з. Во втором и четвертом квадрантах плоскости (х1, х2) расположена траектория с устойчивым движением, которая является прямой с угловым коэффициентом  , равным отрицательному корню характеристического уравнения. Воспользуемся этой особенностью линейной структуры для построения устойчивой СПС. Выберем вторую линейную структуру таким образом, чтобы корни характеристического уравнения
, равным отрицательному корню характеристического уравнения. Воспользуемся этой особенностью линейной структуры для построения устойчивой СПС. Выберем вторую линейную структуру таким образом, чтобы корни характеристического уравнения  были комплексными. Очевидно, что такое
были комплексными. Очевидно, что такое  всегда найдется. Пусть вторая структура также неустойчива и её фазовый портрет представлен на рис. 1.20, д. Из анализа фазовых портретов обеих структур следует метод получения желаемого фазового портрета системы с переменной структурой. Разобьем фазовую плоскость (x1,x2) (Рис. 2.5) на две области, границами которых являются прямые x1 =0 и прямая S, заданная уравнением,
всегда найдется. Пусть вторая структура также неустойчива и её фазовый портрет представлен на рис. 1.20, д. Из анализа фазовых портретов обеих структур следует метод получения желаемого фазового портрета системы с переменной структурой. Разобьем фазовую плоскость (x1,x2) (Рис. 2.5) на две области, границами которых являются прямые x1 =0 и прямая S, заданная уравнением, (2.7)
(2.7) , (2.8)
, (2.8)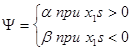 (2.9)
(2.9)
 выбираются таким образом, чтобы линейная структура, соответствующая
выбираются таким образом, чтобы линейная структура, соответствующая  , была колебательной, а линейная структура, соответствующая
, была колебательной, а линейная структура, соответствующая  и
и  переходный процесс характеризуется фазовой траекторией 1 (рис. 2.6). Выберем
переходный процесс характеризуется фазовой траекторией 1 (рис. 2.6). Выберем 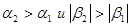 . Новым значениям этих параметров соответствует фазовая траектория 2 (рис. 2.6). Очевидно, что время протекания второго процесса будет меньше, так как для любого х абсолютная величина скорости изменения координаты ошибки на траектории 2 больше, чем на траектории 1. Следует при этом иметь в виду, что увеличение
. Новым значениям этих параметров соответствует фазовая траектория 2 (рис. 2.6). Очевидно, что время протекания второго процесса будет меньше, так как для любого х абсолютная величина скорости изменения координаты ошибки на траектории 2 больше, чем на траектории 1. Следует при этом иметь в виду, что увеличение  приводит к увеличению
приводит к увеличению  в (2.7). Поэтому в (2.9) нужно либо увеличить
в (2.7). Поэтому в (2.9) нужно либо увеличить 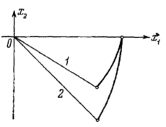
 (2.10)
(2.10) (2.11)
(2.11) . (2.12)
. (2.12) (2.13)
(2.13) (2.14)
(2.14) и
и  могут соответственно принимать два предельных значения:
могут соответственно принимать два предельных значения:  ,
,  или
или  . Всевозможные сочетания коэффициентов
. Всевозможные сочетания коэффициентов  и
и  , и при этом корни характеристического уравнения системы (2.10) действительны, то в силу (2.13) фазовый портрет системы имеет вид, представленный на рис. 1.20, а. Для линейной структуры
, и при этом корни характеристического уравнения системы (2.10) действительны, то в силу (2.13) фазовый портрет системы имеет вид, представленный на рис. 1.20, а. Для линейной структуры  корни характеристического уравнения системы (2.10) действительные и положительные. Фазовый портрет системы в этом случае представлен на рис. 1.20, е. Последние две структуры имеют аналогичные фазовые портреты. При
корни характеристического уравнения системы (2.10) действительные и положительные. Фазовый портрет системы в этом случае представлен на рис. 1.20, е. Последние две структуры имеют аналогичные фазовые портреты. При  и
и  и
и  (2.15)
(2.15) (2.16)
(2.16)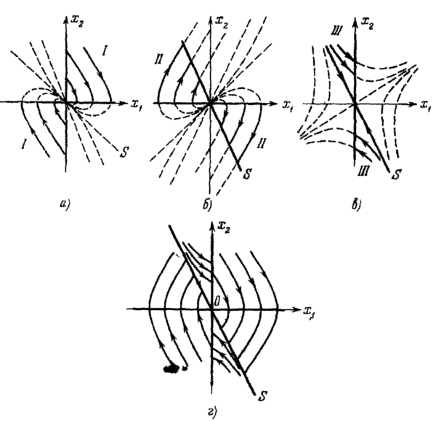
 (2.17)
(2.17) ). Пусть в секторах между прямой S и осью х2 движение изображающей точки происходит по фазовым траекториям этой структуры (область III на рис. 2.7, в), т. е.
). Пусть в секторах между прямой S и осью х2 движение изображающей точки происходит по фазовым траекториям этой структуры (область III на рис. 2.7, в), т. е. (2.18)
(2.18) (2.19)
(2.19) , знак величины s совпадает со знаками х1 и x2, и поэтому x1s >0 и x2s> 0, а для упомянутой структуры эти неравенства должны иметь противоположные знаки. Если изменение структуры будет происходить в соответствии с (2.14) и (2.19), то фазовый портрет устойчивой системы с переменной структурой будет иметь вид, представленный на рис. 2.7, г.
, знак величины s совпадает со знаками х1 и x2, и поэтому x1s >0 и x2s> 0, а для упомянутой структуры эти неравенства должны иметь противоположные знаки. Если изменение структуры будет происходить в соответствии с (2.14) и (2.19), то фазовый портрет устойчивой системы с переменной структурой будет иметь вид, представленный на рис. 2.7, г. переходному процессу в линейной системе соответствует траектория 1 (рис. 2.8). Касательной к этой траектории в начале координат является прямая S0 заданная уравнением
переходному процессу в линейной системе соответствует траектория 1 (рис. 2.8). Касательной к этой траектории в начале координат является прямая S0 заданная уравнением (2.20)
(2.20) - меньший по абсолютной величине отрицательный корень характеристического уравнения линейной системы
- меньший по абсолютной величине отрицательный корень характеристического уравнения линейной системы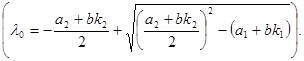
 и, больше по абсолютной величине, чем скорость изменения х2 для линейной системы, равная
и, больше по абсолютной величине, чем скорость изменения х2 для линейной системы, равная  и, во-вторых,
и, во-вторых,
 (2.21)
(2.21)
 (2.22)
(2.22)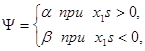 (2.23)
(2.23) (2.24)
(2.24) - постоянные коэффициенты,
- постоянные коэффициенты, 
 . Тогда устойчивая траектория линейной структуры, определяемая
. Тогда устойчивая траектория линейной структуры, определяемая  , рис. 2.9,в.) и фазовые траектории, а точнее говоря, векторы фазовых скоростей обеих структур, в точках прямой переключения оправлены к S. После попадания на S изображающая точка не может уйти от прямой переключения ни по одной из структур и будет двигаться вдоль S. При этом в системе с бесконечно большой частотой возникают переключения структуры с одной на другую. Такой режим работы, при котором на прямой переключения (а для системы произвольного порядка на гиперплоскости переключения) изменение структуры происходит с бесконечно большой частотой, будем называть скользящим режимом. Следует отметить, что прямая переключения не является фазовой траекторией ни для одной из линейных структур. Следовательно, за счёт скользящего режима удается получить искусственное вырожденное движение. В дальнейшем идея создания искусственных вырожденных движений за счет скользящих режимов будет широко применяться при синтезе систем с переменной структурой. Поэтому остановимся несколько подробнее на особенностях движения системы в скользящем режиме и условиях его возникновения.
, рис. 2.9,в.) и фазовые траектории, а точнее говоря, векторы фазовых скоростей обеих структур, в точках прямой переключения оправлены к S. После попадания на S изображающая точка не может уйти от прямой переключения ни по одной из структур и будет двигаться вдоль S. При этом в системе с бесконечно большой частотой возникают переключения структуры с одной на другую. Такой режим работы, при котором на прямой переключения (а для системы произвольного порядка на гиперплоскости переключения) изменение структуры происходит с бесконечно большой частотой, будем называть скользящим режимом. Следует отметить, что прямая переключения не является фазовой траекторией ни для одной из линейных структур. Следовательно, за счёт скользящего режима удается получить искусственное вырожденное движение. В дальнейшем идея создания искусственных вырожденных движений за счет скользящих режимов будет широко применяться при синтезе систем с переменной структурой. Поэтому остановимся несколько подробнее на особенностях движения системы в скользящем режиме и условиях его возникновения.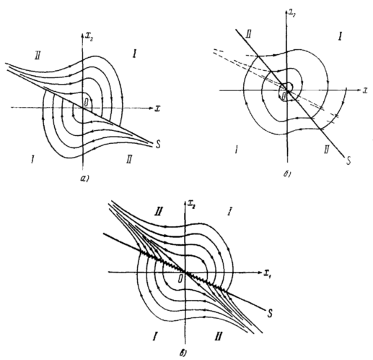
 (2.25)
(2.25) (2.26)
(2.26) (2.27)
(2.27)
 (2.28)
(2.28) (2.29)
(2.29) (2.30)
(2.30) (2.31)
(2.31) ) должны принять значение, соответствующие s>0 и s<0.
) должны принять значение, соответствующие s>0 и s<0. . Если же
. Если же  , то первое неравенство (2.31) выполняется для
, то первое неравенство (2.31) выполняется для  . Нетрудно заметить, что при этом второе неравенство (2.31) также будет всегда выполняться. В результате получаем условия, при которых прямая S является прямой скольжения:
. Нетрудно заметить, что при этом второе неравенство (2.31) также будет всегда выполняться. В результате получаем условия, при которых прямая S является прямой скольжения: (2.32)
(2.32)