Пусть движение объекта регулирования описывается линейным дифференциальным уравнением вида
(2.33)
где - постоянные параметры объекта, х- сигнал ошибки и - управление.
Будем предполагать, что на координаты системы не накладывается ограничений и что информация о состоянии системы, поступающая в управляющее устройство, складывается из непрерывно измеряемых точных значений величин ошибки и её производных.
Введем обозначения , и в дальнейшем при изложении методов теории систем с переменной структурой вместо (2.33) будем рассматривать систему дифференциальных уравнений
(2.34)
Относительно управления и предполагается, что оно представляет собой линейную комбинацию координат системы, причем коэффициенты каждого члена являются кусочно-постоянными функциями и их изменение осуществляется в зависимости от состояния системы. Именно в эти моменты изменения значений коэффициентов и происходит изменение структуры рассматриваемой системы.
Первые представления о методах синтеза управляющего устройства в системах с переменной структурой мы уже получили для случая, когда управление формируется в виде скачкообразно меняющегося воздействия по ошибке. Использование этого вида управления, наиболее простого в классе систем с переменной структурой, показало нам на примере системы второго порядка дополнительные возможности улучшения ее динамических свойств, которые появляются в СПС за счет рационального выбора структуры управляющего устройства и его параметров. Было бы весьма интересно рассмотреть возможности такого управления (управления без введения воздействий по производным на вход неизменяемой части системы) для объектов произвольного порядка.
Итак, для системы (2.34) функцию управления выберем в виде
(2.35)
(2.36)
(2.37)
- постоянные коэффициенты
Введём в рассмотрение n-мерное пространство координат x1,…,xn. Соотношение
s=0 (2.38)
задает в этом пространстве некоторую гиперплоскость S, которая, согласно (2.35), (2.36), является границей разрыва для управляющего воздействия u. В таких системах, как уже отмечалось выше, при выполнении условий (2.27) возникает скользящий режим, характеризуемый тем, что траектория изображающей точки принадлежит границе разрыва. Поскольку идея использования скользящих режимов представляется весьма плодотворной, выясним далее, какими дифференциальными уравнениями описывается движение системы (2.34) в скользящем режиме. Для этой цели используем последовательность рассуждений, проведенную ранее для системы второго порядка. Выполнение условий (2.27) для точек (гиперплоскости S означает, что после попадания на S изображающая точка продолжает свое движение в скользящем режиме по траекториям, принадлежащим этой гиперплоскости. Другими словами, из этого факта следует равенство нулю величины s в скользящем режиме, т. е.
(2.39)
(2.40)
Из (2.40) видно, что в скользящем режиме порядок дифференциального уравнения движения системы понижается, и при этом характер изменения координаты ошибки определяется только коэффициентами с, Если за счет соответствующего выбора коэффициентов сi удается наделить это движение желаемыми с точки зрения выбранного критерия показателями, то гиперплоскость S в пространстве целесообразно сделать гиперплоскостью скольжения. Тогда, если изображающая точка из любого начального положения попадает на S, финальная стадия процесса управления всегда будет протекать в скользящем режиме и, что особенно важно, не будет зависеть от параметров исходной системы уравнений. Таким образом, при синтезе функции управления в СПС следует так выбрать линейные структуры управляющего устройства и последовательность их изменения, чтобы, начиная с некоторого момента времени, в системе всегда возникало, а затем не прекращалось движение в скользящем режиме. Рассмотрим только необходимые и достаточные условия существования гиперплоскости скольжения для системы (2.34). Для решения этой задачи нужно воспользоваться условиями возникновения скользящего режима (2.27).
Найдем величину на гиперплоскости S
(2.41)
Согласно (2.34) и (2.35) вместо (2.41) имеем
(2.42)
Условия существования скользящего режима должны выполняться в точках гиперплоскости S, т. е. для точек Поэтому величина определяется выражением
(2.43)
Для того чтобы для структуры, соответствующей s>0, величина была неположительна, а для структуры, соответствующей s<0, величина была неотрицательна (см. условия (2.27)), как следует из (2.43), достаточно потребовать выполнения следующих соотношений:
(2.44)
или, что то же,
(2.45)
(2.46)
Если условия (2.45) выполнены, то гиперплоскость S, заданная согласно (2.37), (2.38), будет гиперплоскостью скольжения. Заметим, что при нарушении хотя бы одного из условий (2.45) всегда найдется точка на S, в которой скользящий режим отсутствует, поэтому условия (2.45) являются также и необходимыми.
Для рассматриваемого закона управления (2.35) - (2.37) все сi должны удовлетворять (2.46). Эти условия накладывают определённые ограничения на выбор коэффициентов ci , и может оказаться, что в рамках этих ограничений движение системы в скользящем режиме, описываемое уравнениями (2.40), будет неустойчивым. Сформулируем и докажем теорему об устойчивости движения по гиперплоскости скольжения для системы произвольного порядка.
Будем рассматривать по-прежнему систему (2.34), для которой управление и определяется согласно (2.35) - (2.37), причем гиперплоскость S, задаваемая в пространстве (x1,...,хп) уравнением (2.38), является гиперплоскостью скольжения, т.е. коэффициенты ci, определяющие положение в этом пространстве, и коэффициенты α и β закона управления удовлетворяют соотношениям (2.45), (2.46). Введём в (2.34) вместо координаты xn новую координату , которая равна нулю на гиперплоскости переключения. Система (2.34) запишется следующим образом:
(2.47)
Системы (2.34) и (2.47) эквивалентны. Для системы (2.34) управление u выбрано так, что существует гиперплоскость скольжения, т.е. выполняются условия (2.40). Это означает, что все коэффициенты при х2,...,хn-1 в последнем уравнении системы (2.47) обращаются в нуль. Таким образом, вместо (2.47) имеем
(2.48)
Отметим одно свойство (2.48), которое в дальнейшем используем при формулировке и доказательстве теоремы об устойчивости движения системы (2.34) в скользящем режиме.
Пусть . Тогда систему (2.48) можно переписать в виде
(2.49)
Нетрудно заметить, что в этом случае система (2.49) имеет один очевидный корень . Следовательно, при и при выполнении условий существования скользящего режима характеристическое уравнение исходной системы
(2.50)
также имеет корень .
Теорема. Пусть выполнены условия (2.45), (2.46). Для того чтобы движение изображающей точки по гиперплоскости скольжения для системы (2.34) было устойчивым, необходимо и достаточно, чтобы все корни характеристического уравнения этой системы при , помимо очевидного , лежали в левой полуплоскости плоскости корней.
Предположим, что характеристическое уравнение системы при имеет корни , причём, согласно изложенному выше, один из корней, например λn, равен по условию теоремы остальные корни имеют отрицательные вещественные части. В этом случае решение системы (2.34) может быть представлено в виде
(2.51)
где Аi - постоянные интегрирования, зависящие от начальных условий.
Заметим, что для рассматриваемой линейной системы, т. е. при выполнении условии (2.46) и при Ψ=Ω в силу системы (2.49) величина S изменяется по закону.
(2.52)
где А - постоянная интегрирования, зависящая от начальных условий.
В начале при исследовании вопроса об устойчивости различных движений в линейной системе был отмечен тот факт, что если в системе отсутствует движение, соответствующее одному из корней характеристического уравнения (начальные условия таковы, Ак=0), то в её фазовом пространстве существует гиперплоскость, которая является совокупностью траекторий.
Пусть начальные условия таковы, что движение, соответствующие) корню λn=cn-1-an, отсутствует. Тогда величина s≡0, и при выполнении условий теоремы в силу (2.49) движение системы описывается уравнениями
(2.53)
Это движение устойчиво, так как по условию теоремы Re λj<0 (j=1,…,n-1). Замечаем, что (2.53) совпадает с уравнениями (2.40) движения системы в скользящем режиме. Отсюда приходим к выводу, что и движение в скользящем режиме устойчиво. Таким образом, доказана достаточность условий теоремы. Необходимость легко доказывается от противного. Действительно, если (2.50) имеет больше одного корня в правой полуплоскости, то, как следует из (2.49), движение в скользящем режиме (2.53) не может быть устойчивым.
Таким образом, для системы произвольного порядка были рассмотрены условия существования гиперплоскости скольжения и условия устойчивости движения по ней. Но помимо устойчивости предъявляются определенные требования и к характеру протекания процесса управления при движении системы в скользящем режиме. В связи с этим остановимся кратко на вопросах, связанных с получением желаемых динамических свойств скользящих движений. Напомним, что в скользящем режиме движение системы управления описывается системой линейных дифференциальных уравнений (2.40) с постоянными коэффициентами сi, и полностью определяется этими величинами. Поэтому для выбора параметров ci можно использовать все известные в теории автоматического регулирования способы оценки процессов в линейной системе, с той лишь разницей, что в нашем случае на ci накладываются специфические ограничения (2.46), вытекающие из условий существования гиперплоскости скольжения. Так, например, для суждения о быстроте затухания скользящих движений можно использовать, как косвенную оценку, степень устойчивости и выбрать сi так, чтобы минимизировать её. Оптимальные значения параметров сi, можно также выбирать исходя из интегральных оценок. Эти методы хорошо известны. Поэтому мы на примере системы с переменной структурой третьего порядка, описываемой уравнениями (2.54) - (2.56), проиллюстрируем применение упомянутых критериев качества для выбора наилучшей гиперплоскости скольжения.
Пусть для системы дифференциальных уравнений (2.34) п=3, a1=а2= а3= 0, b = 1; тогда
(2.54)
(2.55)
где
(2.56)
Как уже говорилось, при выполнении условий
(2.57)
(2.58)
в рассматриваемой системе возникает устойчивое движение в скользящем режиме, описываемое, согласно (2.40), линейным дифференциальным уравнением
x+c2x+c1x=0 (2.59)
с постоянными параметрами с1 и с2
Выберем, исходя из оценки «степень устойчивости», коэффициенты с1 и с2 так, чтобы обеспечивалась максимально возможная быстрота затухания скользящих движений.
Характеристическое уравнение для (2.59) имеет вид
p2+c2p+c1=0 (2.60)
Имея в виду (2.57), исключим из (2.58) и (2.60) величину с1. Тогда получим
(2.61)
(2.62)
Найдем корни характеристического уравнения (2.62)
(2.63)
Из (2.63) очевидно, что чем больше величина с2, тем быстрее затухает движение системы в скользящем режиме. Это означает, что коэффициент с2 следует выбрать максимально большим. Но при этом следует помнить о том, что величина с2 должна удовлетворять (2.61) и при её увеличении может нарушиться последнее из неравенств (2.61). Поэтому искомое значение с2 обеспечивающее максимально возможную быстроту движения системы в скользящем режиме, получаем из (2.61)
(2.64)
Рассмотрим теперь задачу выбора коэффициентов c1 и с2 для той же системы, но уже исходя из другого критерия - интегрального. Выберем с1 и с2 из условия минимума интеграла
(2.65)
Примем за начало отсчёта момент попадания изображающей точки на плоскость скольжения и допустим, что при t=t0,, x0=1, x0=0. В рассматриваемом случае интегральная оценка (2.65) имеет вид
(2.66)
Поскольку в скользящем режиме с1=с22, то
(2.67)
Очевидно, I=Imin, если , т.е.
(2.68)
Напомним, что величина с2 должна удовлетворять (2.61). Поэтому, если для значений с2, доставляющих минимум выбранному интегральному критерию, (2.61) справедливо, то это значение и следует принять за искомое; если минимум I достигается при значениях с2 таких, что (2.61) нарушается, то в качестве искомого значения с2 следует принять одно из граничных значений (т.е. значений, при которых начинают выполняться условия (2.61)) [12].
В заключение на основании изложенных выше результатов, наметим методику выбора параметров управляющего устройства в системе с переменной структурой (2.34) - (2.37), которые гарантируют существование гиперплоскости скольжения с устойчивым движением. Задача состоит в выборе таких коэффициентов α, β, сi, чтобы удовлетворялись (2.45), (2.46) и решение системы (2.53) было устойчивым. Из (2.46) следует, что один из коэффициентов ci , например cn-1 можно задавать произвольно, а затем найти оставшиеся. Далее по полученным значениям с1 и cn-1 найти согласно (2.45). Из всех возможных значений сn-1 следует выбрать такие, чтобы выполнялись условия приведенной выше теоремы. Если не ограничены, то сn, может принимать любое значение; если ограничены, то сn-1, можно выбирать из некоторой ограниченной области. Заметим, что даже при неограниченных не всегда удается одновременно удовлетворить условиям теоремы и условиям существования гиперплоскости скольжения.

 (2.33)
(2.33) - постоянные параметры объекта, х- сигнал ошибки и - управление.
- постоянные параметры объекта, х- сигнал ошибки и - управление. , и в дальнейшем при изложении методов теории систем с переменной структурой вместо (2.33) будем рассматривать систему дифференциальных уравнений
, и в дальнейшем при изложении методов теории систем с переменной структурой вместо (2.33) будем рассматривать систему дифференциальных уравнений (2.34)
(2.34) (2.35)
(2.35) (2.36)
(2.36) (2.37)
(2.37) - постоянные коэффициенты
- постоянные коэффициенты 
 (2.39)
(2.39) (2.40)
(2.40) целесообразно сделать гиперплоскостью скольжения. Тогда, если изображающая точка из любого начального положения попадает на S, финальная стадия процесса управления всегда будет протекать в скользящем режиме и, что особенно важно, не будет зависеть от параметров исходной системы уравнений. Таким образом, при синтезе функции управления в СПС следует так выбрать линейные структуры управляющего устройства и последовательность их изменения, чтобы, начиная с некоторого момента времени, в системе всегда возникало, а затем не прекращалось движение в скользящем режиме. Рассмотрим только необходимые и достаточные условия существования гиперплоскости скольжения для системы (2.34). Для решения этой задачи нужно воспользоваться условиями возникновения скользящего режима (2.27).
целесообразно сделать гиперплоскостью скольжения. Тогда, если изображающая точка из любого начального положения попадает на S, финальная стадия процесса управления всегда будет протекать в скользящем режиме и, что особенно важно, не будет зависеть от параметров исходной системы уравнений. Таким образом, при синтезе функции управления в СПС следует так выбрать линейные структуры управляющего устройства и последовательность их изменения, чтобы, начиная с некоторого момента времени, в системе всегда возникало, а затем не прекращалось движение в скользящем режиме. Рассмотрим только необходимые и достаточные условия существования гиперплоскости скольжения для системы (2.34). Для решения этой задачи нужно воспользоваться условиями возникновения скользящего режима (2.27). на гиперплоскости S
на гиперплоскости S (2.41)
(2.41) (2.42)
(2.42) Поэтому величина
Поэтому величина  определяется выражением
определяется выражением (2.43)
(2.43)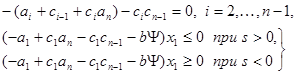 (2.44)
(2.44) (2.45)
(2.45) (2.46)
(2.46) , которая равна нулю на гиперплоскости переключения. Система (2.34) запишется следующим образом:
, которая равна нулю на гиперплоскости переключения. Система (2.34) запишется следующим образом: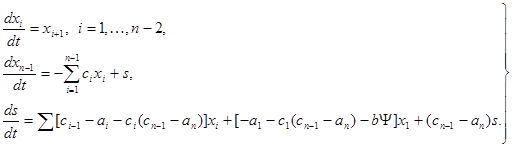 (2.47)
(2.47)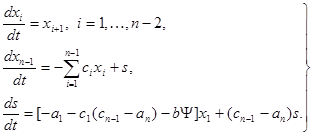 (2.48)
(2.48) . Тогда систему (2.48) можно переписать в виде
. Тогда систему (2.48) можно переписать в виде (2.49)
(2.49) . Следовательно, при
. Следовательно, при  и при выполнении условий существования скользящего режима характеристическое уравнение исходной системы
и при выполнении условий существования скользящего режима характеристическое уравнение исходной системы (2.50)
(2.50) , причём, согласно изложенному выше, один из корней, например λn, равен
, причём, согласно изложенному выше, один из корней, например λn, равен  (2.51)
(2.51) (2.52)
(2.52) (2.53)
(2.53) (2.54)
(2.54) (2.55)
(2.55) (2.56)
(2.56) (2.57)
(2.57) (2.58)
(2.58) (2.61)
(2.61) (2.62)
(2.62) (2.63)
(2.63) (2.64)
(2.64) (2.65)
(2.65) (2.66)
(2.66) (2.67)
(2.67) , т.е.
, т.е. (2.68)
(2.68) согласно (2.45). Из всех возможных значений сn-1 следует выбрать такие, чтобы выполнялись условия приведенной выше теоремы. Если
согласно (2.45). Из всех возможных значений сn-1 следует выбрать такие, чтобы выполнялись условия приведенной выше теоремы. Если