При исследовании различных видов нелинейных систем весьма широко и плодотворно используется метод фазового пространства. Это объясняется тем, что рассмотрение фазового пространства динамической системы позволяет дать геометрическую интерпретацию происходящих в ней движений. Удобство применения и наглядность этого метода (особенно для систем низкого порядка) послужили причиной того, что весь материал далее изложён на языке фазовых представлений. В связи с этим представляется целесообразным пояснить основные понятия этого метода.
Как известно, состояние динамической системы п-го порядка в любой момент времени полностью определяется значениями п координат. Значения этих координат задают некоторую точку в n-мерном пространстве, по осям которого отложены координаты системы. Точка, характеризующая состояние системы, называется изображающей точкой, а пространство - фазовым пространством. При движении системы её координаты изменяются, и изображающая точка описывает некоторую кривую, которая называется фазовой траекторией. Это движение характеризуется вектором фазовой скорости, который направлен по касательной к траектории в сторону движения изображающей точки. Длина вектора фазовой скорости определяется скоростью изменения каждой из координат системы. Тогда движение изображающей точки по фазовым траекториям в фазовом пространстве можно рассматривать как геометрическую интерпретацию движения в динамической системе.
В качестве иллюстрации приведём фазовые портреты линейных систем, описываемых уравнением второго порядка с постоянными параметрами, и установим связь между коэффициентами уравнения и характером фазовых траекторий. Предположим, что дифференциальное уравнение
(1.20)
описывает движение некоторой динамической системы. Рассмотрим подробно случай, когда корни соответствующего характеристического уравнения и являются действительными и отрицательными, причем . Решение уравнения (1.20) имеет вид
(1.21)
где А1 и А2 - постоянные интегрирования, зависящие от начальных условий. Уравнения (1.21) в параметрической форме задают семейство фазовых траекторий на фазовой плоскости . Заметим, что при А2=0 величины х2 и х1 связаны зависимостью х2= , и поэтому движение изображающей точки будет происходить по прямой I (рис. 1.14, а), заданной уравнением
(1.22)
Аналогично при А1=0 фазовая траектория становится прямой II, заданной уравнением
(1.23)
Так как , то траектории стягиваются к началу координат. В силу того, что при прямая I является касательной для любой фазовой траектории, за исключением прямой II. Общий вид фазовой плоскости для рассматриваемого случая представлен на рис. 1.14, а. Фазовыми траекториями является семейство кривых параболического типа, уравнения которых можно получить из (1.21), исключив параметр t. Здесь и в дальнейшем стрелки на фазовых траекториях обозначают направление движения изображающей точки.
В случае, если корни характеристического уравнения отрицательны и равны, фазовый портрет системы имеет вид, представленный на рис. 1.14, б. Среди фазовых траекторий имеется одна прямая, угловой коэффициент которой равен корню характеристического уравнения. Эта прямая, так же как и в предыдущем случае, является касательной для всех фазовых траекторий.
Система, будет также устойчива, если корни характеристического уравнения комплексны и имеют отрицательные действительные части. Фазовыми траекториями такой устойчивой системы будет семейство скручивающихся спиралей (рис. 1.14, в)
Рис. 1.14.
Рассматриваемая динамическая система будет находиться на границе устойчивости, если а2=0, а1>0 (случай чисто мнимых корней). На фазовой плоскости, соответствующей этой системе, изображающая точка будет двигаться по замкнутым траекториям, которые образуют семейство вложенных друг в друга эллипсов (рис. 1.14, г). Для системы с колебательной неустойчивостью, фазовым портретом является семейство раскручивающихся спиралей (рис. 1.14, д). На рис. 1.14, е представлены фазовые траектории системы с апериодической неустойчивостью, если оба корня характеристического уравнения положительны. Две прямые являющиеся фазовыми траекториями, имеют угловые коэффициенты, равные значениям этих корней. Случай кратных корней приведем на рис. 1.14, ж. И, наконец, на рис. 1.14, з, и, к показаны фазовые портреты системы, когда корни характеристического уравнения имеют разные знаки (в первом случае положительный корень больше, во втором равен и в третьем меньше абсолютного значения отрицательного корня). На всех трех портретах имеются фазовые траектории, являющиеся прямыми с угловыми коэффициентами, равными корням характеристического уравнения системы. Двигаясь по одной из этих прямых, изображающая точка асимптотически приближается к нулю, а по второй - уходит в бесконечность.
На рис. 1.14 представлены всевозможные виды движения, которые могут иметь место в динамической системе, описываемой уравнением (1.20). Непосредственно из анализа этих портретов можно сделать вывод о таких важных показателях переходного процесса, как устойчивость или неустойчивость, аппериодичность или колебательность, можно судить о темпах протекания переходного процесса, о перерегулировании и т. п.
С точки зрения фазовых представлений движения, задача управления сводится либо к перемещению изображающей точки из некоторой допустимой области начальных условий в заданную точку (или область) фазового пространства, либо к обеспечению движения изображающей точки по некоторой заданной траектории. Вид траекторий, по которым осуществляется переход системы из одного состояния в другое, позволяет судить о динамических свойствах системы (время переходного процесса, перерегулирования, колебательность, точность и т. п.). Синтез методом фазового пространства предполагает выбор такого управления, Которое обеспечивает этот переход по желаемым траекториям.
Рассмотрим некоторые особенности фазового пространства линейных структур и наметим основные идеи, которые могут быть положены в основу построения систем с переменной структурой.
Пусть линейная система описывается дифференциальным уравнением
(1.24)
где а0,a1,..an-1 - постоянные величины.
Исследуем вопрос об устойчивости различных движений этой системы в фазовом пространстве X координат х, ,.., хn-1. Если λ1, λ2, λn - корни характеристического уравнения, тo
(1.25)
где Aj - постоянные интегрирования, зависящие от начальных условий
Очевидно, что линейная структура устойчива или любая траектория в фазовом пространстве X стягивается к началу координат, если Re λj< 0 (j=1,...,n). В рассмотренном примере этому случаю соответствуют фазовые портреты, представленные на рис. 1.14, а, б, в.
Отметим существенную особенность линейной структуры, неустойчивость в которой вызвана тем, что один из корней характеристического уравнения λk больше нуля. Если при этом Re λj< 0 (j≠k), то в фазовом пространстве системы существует совокупность устойчивых траекторий, т. е. таких траектории, по которым изображающая точка асимптотически приближается к началу координат. Действительно, если начальные условия таковы, что Ак =0, то, согласно (1.25),
Известно, что при Ak=0 координаты хл ,..., xn-1 линейно зависимы, т. е. найдутся такие действительные числа с0,...сn-1 что
(1.26)
Соотношение (1.26) задает в пространстве X некоторую гиперплоскость S. Следовательно, совокупность устойчивых траекторий линейной структуры в случае, если характеристическое уравнение имеет один положительный корень, образует гиперплоскость в фазовом пространстве системы. Поясним указанную особенность такой линейной структуры на примере системы второго порядка, описываемой уравнением (1.20). Пусть в (1.21) λ1> 0, λ2< 0. Соответствующие фазовые портреты показаны на рис. 1.14, з; и, к. Если А1=0, то lim x=0, lim =0 и в силу (1.21)
(1.27)
Прямая S, заданная уравнением (1.27) (рис. 1.14, з, и, к), и является совокупностью устойчивых траекторий для неустойчивой системы второго порядка. Если в начальный момент времени изображающая точка находится на прямой S, то она будет асимптотически приближаться к началу координат. В то же время необходимо отметить, что любые сколь угодно малые возмущения, всегда существующие в системе, «выбивают» точку с прямой S и в системе возникает неустойчивое движение. В дальнейшем движения изображающей точки, происходящие по траекториям, принадлежащим гиперплоскости, будем называть вырожденными. Эта особенность фазового пространства линейных систем позволяет заметить один из возможных принципов построения систем с переменной структурой.
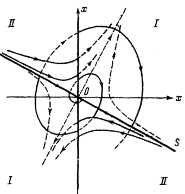
Предположим, что в нашем распоряжении имеются две, пусть даже неустойчивые, линейные структуры, но в фазовом пространстве одной из них существует гиперплоскость с устойчивыми вырожденными движениями. Тогда следует выбрать такую последовательность изменения этих структур, чтобы, во-первых, любая траектория в пространстве X пересекала эту гиперплоскость и, во-вторых, в момент попадания изображающей точки на эту гиперплоскость структура системы совпадала со структурой с устойчивым вырожденным движением. Построенная таким образом система будет устойчивой для любых начальных условий. Рассмотрим, например, систему, которая может иметь две фиксированные неустойчивые структуры. Пусть первой структуре соответствует фазовый портрет рис. 1.14, д, а второй - рис. 1.14, к. Возникает задача: выбрать такую последовательность изменения структур, чтобы любое движение системы было устойчиво. Решим эту задачу методом фазовой плоскости. Разобьём фазовую плоскость (х, ) на две области, границами которых являются прямая S и ось (рис. 1.15). Если состояние системы таково, что изображающая точка находится в области I, то её движение должно происходить по раскручивающимся спиралям (система должна иметь первую структуру). В области II изображающая точка должна двигаться по кривым гиперболического типа (система должна иметь вторую структуру). Из рис. 1.15 видно, что изображающая точка всегда попадает на прямую S, которая является устойчивой траекторией для второй структуры. Поэтому для любых начальных условий, начиная с некоторого момента времени (момента попадания на S)возникает устойчивое движение. Очевидно, что если управляющее устройство осуществляет изменение структуры на прямой S и оси , то в системе будет обеспечена апериодическая устойчивость движения. Такой подход позволяет построить устойчивую систему и отказаться от требования устойчивости для каждой из имеющихся структур.
Рис. 1.15.
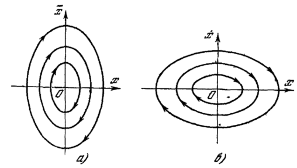
Другой способ, который может быть положен в основу построения систем с переменной структурой, целесообразно использовать в случае, если фазовое пространство для каждой из фиксированных неустойчивых структур не содержит гиперплоскостей с устойчивыми вырожденными движениями. За счёт «сшивания» в определенной последовательности участков неустойчивых траекторий удаётся в итоге получить устойчивое движение для любых начальных условий. В качестве примера рассмотрим случай, когда в нашем распоряжении имеются две линейные структуры, находящиеся на границе устойчивости. Соответствующие им фазовые портреты представлены на рис. 1.16, а, б. Пусть в первом и третьем квадрантах плоскости (х, ) фазовыми траекториями изображающей точки являются траектории рис. 1.16, а, а во втором и четвертом квадрантах - фазовые траектории рис. 1.16, б. Очевидно, что если изменение структуры происходит на координатных осях и фазовый портрет системы имеет вид, представленный на рис. 1.17, то при любых начальных условиях движение в системе будет устойчивым.
Рис. 1.16.
Рис. 1.17.
Наиболее плодотворной идеей синтеза СПС оказалась идея создания искусственных вырожденных движений. Сущность этого подхода заключается в следующем: в фазовом пространстве X задается некоторая гиперплоскость S, движение в которой обладает желаемыми свойствами, причём траектории, лежащие в S, не принадлежат ни одной из имеющихся структур. Последовательность изменения структур должна быть выбрана такой, чтобы изображающая точка всегда попадала на эту гиперплоскость, а
затем двигалась по ней. Тогда с момента попадания в системе будет существовать искусственное вырожденное движение, которое можно наделить рядом полезных свойств, не присущих ни одной из фиксированных структур. Идея создания искусственных вырожденных движений может быть проиллюстрирована на следующем примере. Пусть по-прежнему в системе предусмотрена возможность использования двух фиксированных линейных структур, которым соответствуют фазовые портреты рис. 1.14, г и 1.14, к.
Рис. 1.18.
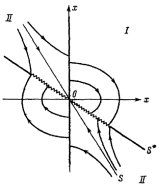
Предположим далее, что изменение структуры системы осуществляется на оси в на прямой S*, которая не является фазовой траекторией ни для одной из имеющихся структур (рис. 1.18). Ось х и прямая S* разбивают фазовую плоскость на две области, причем в области I изображающая точка движется по эллиптическим кривым, а в области II - по гиперболическим кривым. Очевидно, что из любого начального положения изображающая точка попадает на границу S*. Если угловой коэффициент прямой S*, то в окрестности S* фазовые траектории будут направлены встречно (рис. 1.18). Тогда, попав на S*, изображающая точка в дальнейшем ее не покинет, т. е. прямая S* является фазовой траекторией. Таким образом, удаётся обеспечить существование искусственных вырожденных движений. [10]

 (1.20)
(1.20) и
и  являются действительными и отрицательными, причем
являются действительными и отрицательными, причем  . Решение уравнения (1.20) имеет вид
. Решение уравнения (1.20) имеет вид (1.21)
(1.21) . Заметим, что при А2=0 величины х2 и х1 связаны зависимостью х2=
. Заметим, что при А2=0 величины х2 и х1 связаны зависимостью х2=  , и поэтому движение изображающей точки будет происходить по прямой I (рис. 1.14, а), заданной уравнением
, и поэтому движение изображающей точки будет происходить по прямой I (рис. 1.14, а), заданной уравнением (1.22)
(1.22) (1.23)
(1.23) , то траектории стягиваются к началу координат. В силу того, что
, то траектории стягиваются к началу координат. В силу того, что  при
при  прямая I является касательной для любой фазовой траектории, за исключением прямой II. Общий вид фазовой плоскости для рассматриваемого случая представлен на рис. 1.14, а. Фазовыми траекториями является семейство кривых параболического типа, уравнения которых можно получить из (1.21), исключив параметр t. Здесь и в дальнейшем стрелки на фазовых траекториях обозначают направление движения изображающей точки.
прямая I является касательной для любой фазовой траектории, за исключением прямой II. Общий вид фазовой плоскости для рассматриваемого случая представлен на рис. 1.14, а. Фазовыми траекториями является семейство кривых параболического типа, уравнения которых можно получить из (1.21), исключив параметр t. Здесь и в дальнейшем стрелки на фазовых траекториях обозначают направление движения изображающей точки.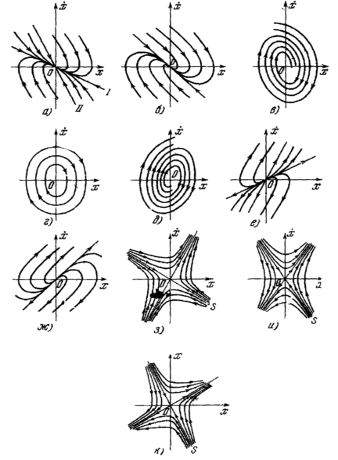
 (1.24)
(1.24) ,.., хn-1. Если λ1, λ2, λn - корни характеристического уравнения, тo
,.., хn-1. Если λ1, λ2, λn - корни характеристического уравнения, тo (1.25)
(1.25)
 (1.26)
(1.26) (1.27)
(1.27)