Краткий обзор основных задач, встречающихся в практике автоматического управления, был проведен под углом зрения построения регуляторов с фиксированной структурой. Иначе говоря, выбор структуры системы осуществлялся, исходя из предположения, что совокупность функциональных элементов и характер связей между ними остаются раз и навсегда неизменными. Однако такой взгляд на проектирование систем управления, вообще говоря, не является единственно возможным. Действительно, при синтезе управляющего устройства можно заранее ввести в структуру системы такие функциональные элементы, которые во время протекания процесса управления изменяют знак обратной связи, скачкообразно изменяют коэффициенты воздействия по различным
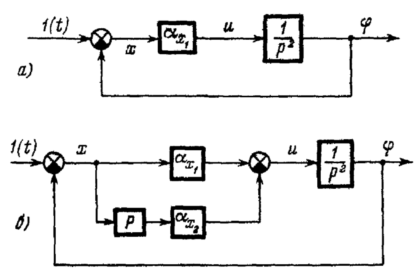
Рис. 1.9
координатам и т. д., т. е. изменяют структуру системы. Тогда в зависимости от выбранного алгоритма и имеющейся информации система будет обладать той или иной структурой. Можно предположить, что в такой системе удастся сочетать полезные свойства каждой из имеющейся совокупности структур, а быть может, и получить какие-либо новые свойства, не присущие любой из них. Следует ожидать, что такой подход позволит существенно повысить эффективность управления.
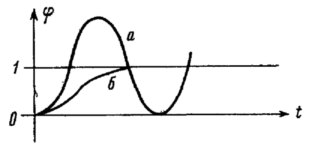
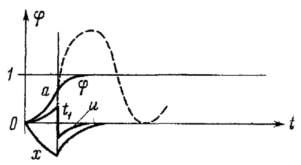
Приведём простейший пример. Предположим, что имеются две линейные структуры, представленные на рис. 1.9, а, б. Соответствующие переходные характеристики изображены на рис. 1.10. В первом случае (рис. 1.9, а) воздействие по производной мало и переходный процесс носит характер незатухающих колебаний, во втором случае вводится демпфирующее воздействие (рис. 1.9, б) и переходный процесс становится апериодическим. Пусть возникает задача получить процесс с большим быстродействием, чем процесс б на рис. 1.10, и без перерегулирования. Очевидно, что за счет изменения в момент времени t1 (рис. 1.11) структуры с первой на вторую удается обеспечить желаемый характер переходного процесса. Этот эффект объясняется тем, что на участке 0–t1 происходит быстрое увеличение регулируемой координаты (свойство первой структуры), а затем вводится демпфирующее воздействие (рис. 1.11), которое позволяет устранить перерегулирование (свойство второй структуры). Такое сочетание свойств обеих структур становится возможным, если в управляющем устройство системы регулирования предусмотреть ключевые логические элементы (КЭ) (рис. 1.12), осуществляющие скачкообразное изменение коэффициента воздействия по производной, или, что-то же, структуры системы.
Рис. 1.10.
Рассмотренный пример является иллюстрацией системы уже не с фиксированной, а с переменной структурой. В дальнейшем под системами с переменной структурой (СПС) будем понимать системы, в которых связи между функциональными элементами меняются тем или иным образом в зависимости от состояния системы.
Рис. 1.11
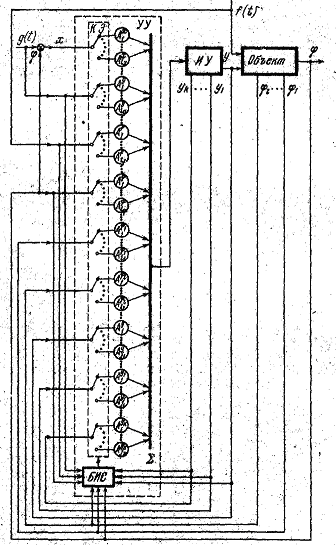
На рис. 1.13 представлена схема системы с переменной структурой. В зависимости от того, какие координаты системы и внешние воздействия доступны для измерения, на вход управляющего устройства (УУ) может поступать информация о величине ошибки х, выходной координате исполнительного устройства у, задающем и возмущающем воздействиях g(t) и f(t), о регулируемой величине φ, о промежуточных координатах объекта φ1...,φi и исполнительного устройства y1,…,yk. Управляющее устройство содержит некоторую совокупность функциональных звеньев, причём оператор каждого из них обозначен на рис. 1.13 буквой А с соответствующими индексами. Каждая из входных величин управляющего устройства может поступать на входы только «своих» звеньев. На рис. 1.13 верхний индекс оператора А говорит о входной величине звена, а нижний индекс указывает на его порядковый номер. Управляющее воздействие является суммой выходных величин всех звеньев. В управляющем устройстве имеются ключевые элементы (КЭ). Каждый ключевой элемент замыкает один из предусмотренных каналов передачи информации. Всевозможные сочетания положений контактов (КЭ) определяют совокупность имеющихся в распоряжении фиксированных структур. Блок изменения структуры БИС, на основе анализа всей поступающей на управляющее устройство информации, даёт команду на изменение структуры системы. Задача синтеза такой СПС состоит в выборе операторов всех звеньев и логических законов, в соответствии с которыми изменяется структура системы.