Широкое использование автоматики во всех областях практической деятельности, наблюдаемое в настоящее время, четко выраженная тенденция к усложнению, как самих объектов, так и задач автоматизации привели к бурному развитию науки об управлении. Переход к более производительным технологическим процессам, применение более совершенных машин и аппаратов, стремление довести до максимума эффективность использования производственных агрегатов, увеличить производительность, улучшить качество продукции, обеспечить экономию электроэнергии и ценного сырья и т. п. заставляют искать новые принципы управления, создавать новые типы систем.
Несмотря на большое разнообразие динамических свойств объектов, и процессов, подлежащих автоматизации, а также требований к системам автоматического регулирования, можно выделить две основные задачи управления: во-первых, поддержание одной или нескольких регулируемых величин на требуемом уровне - задача стабилизации и, во-вторых, изменение регулируемых величин в соответствии с заданными законами - задача слежения. В дальнейшем будем рассматривать только проблемы, связанные с построением систем стабилизации и слежения. Задачи стабилизации и слежения повседневно встречаются в практике автоматического управления. Так, например, в системах электроснабжения требуется поддерживать с высокой степенью точности заданное напряжение на шинах генератора, т. е. решать задачу стабилизации. Примером следящей системы может служить система наведения самолета на цель, когда пространственные координаты самолета должны непрерывно меняться в зависимости от взаимного положения самолета и цели.
Создание высококачественных систем стабилизации и слежения значительно затрудняется, если на объект регулирования действуют заранее непредсказуемые и неконтролируемые возмущения. Так, в системе стабилизации напряжения таким возмущением является изменение нагрузки генератора, а в случае системы наведения самолета - различные ветровые возмущения. Эти возмущения вызывают отклонение регулируемых координат от требуемых значений, и если их не учитывать при проектировании регуляторов, то они могут стать причиной неудовлетворительной работы системы управления. Значительные трудности встречаются также при разработке систем стабилизации и слежения в случае, когда характеристики объекта существенно изменяются в процессе работы и от изделия к изделию. Действительно, пусть регулятор обеспечивает нормальное функционирование системы при определенных характеристиках объекта. Однако при их изменении работа системы может ухудшиться, и величина отклонения регулируемой координаты от требуемого уровня окажется недопустимой. Такие же последствия в ряде случаев могут иметь место, если не учитывать взаимного влияния между отдельными контурами в сложных системах и пренебрегать наличием элементов с запаздыванием, существенно нелинейных элементов и т. п. Этот далеко не полный перечень проблем, возникающих при создании, системы стабилизации и слежения, показывает, с какими сложностями приходится сталкиваться её проектировщику.
В настоящее время хорошо разработаны теория и принципы построения линейных систем, обеспечивающих высококачественное управление объектом в сложных условиях работы.
Рассмотрим коротко существующие способы построения автоматических систем, предназначенных для решения задач стабилизации и слежения, и выявим особенности их применения. Как известно, при создании системы регулирования основным вопросом является вопрос выбора элементов системы, связей между ними, источников информации и т. п., т. е., другими словами, вопрос рационального выбора структуры системы.[3] Следует сказать, что структурный подход к синтезу систем во многих случаях оказывается весьма плодотворным, так как он позволяет достаточно наглядно выявить вид управляющих воздействий, необходимость введения различных обратных, опережающих или перекрестных связей, вскрыть физическую природу явлений, лежащих в основе того или иного способа построения системы регулирования. Что же такое структура системы автоматического регулирования?
Структурой системы автоматического регулирования будем называть совокупность определенным образом связанных функциональных элементов системы. Функциональные элементы осуществляют необходимые преобразования информации; под связями будем понимать каналы передачи информации. Говоря, что система автоматического регулирования обладает той или иной структурой, будем предполагать, что система содержит те или иные элементы, связанные тем или иным образом.
Графически структуру системы отображает структурная схема. Структурная схема может быть детализированной в различной степени. Наиболее обобщенная схема системы автоматического регулирования изображена на рис. 1.1. Основными элементами системы являются объект управления и регулятор. С точки зрения приведенной структурной схемы, поставленные выше задачи регулирования могут быть сформулированы следующим образом: автоматическое поддержание с заданной точностью регулируемой (выходной) величины объекта на заданном уровне g - const - задача стабилизации; автоматическое поддержание с заданной точностью равенства регулируемой (выходной) величины объекта и входной величины - задающего воздействия, являющегося некоторой функцией времени g(t) - задача слежения. При этом на объект могут действовать внешние возмущения, описываемые некоторой функцией времени f(t). Буквой х обозначена разность между заданием g и выходной координатой , так называемое рассогласование или сигнал ошибки. И в том и в другом случае целью регулирования является обеспечение с той или иной степенью точности равенства нулю сигнала ошибки х. Эта цель достигается с помощью воздействующего на объект регулятора, состоящего, как правило, из исполнительного устройства (ИУ) и управляющего устройства (УУ). В управляющем устройстве УУ на основании информации о состоянии системы, о задающем воздействии g и о внешних воздействиях f, если они доступны для измерения, формируется управляющее воздействие u. Это управление поступает на ИУ, выходная координата y которого непосредственно воздействует на объект регулирования, в результате чего обеспечивается равенство выходной координаты и задающего воздействия g.
Рис. 1.1
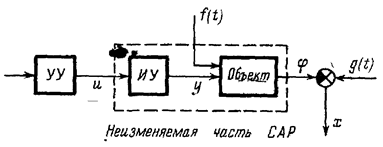
Как правило, исполнительное устройство представляет собой мощное механическое, электромеханическое, гидравлическое или пневматическое устройство, динамические свойства которого обычно неизменны. В связи с этим иногда бывает удобно объединить объект, динамические свойства которого непосредственно изменять, тоже не удается, и исполнительное устройство и рассматривать их как неизменяемую часть системы регулирования (рис. 1.2).
Рис. 1.2
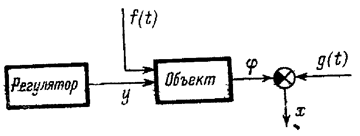
Заметим, что в ряде случаев функции управляющего и исполнительного устройств нельзя разделить, и тогда регулятор не может быть представлен в виде двух блоков. Такая система регулирования имеет вид, изображенный на рис. 1.3.
Рис. 1.3
Перейдем теперь непосредственно к изложению методов построения систем автоматического регулирования (САР). Для приведенных структурных схем, которые являются достаточно общими, эта задача сводится к получению необходимой информации о состоянии системы и формированию из этой информации функции управления и. Будем считать, что движение объекта регулирования описывается линейным дифференциальным уравнением
(1.1)
а исполнительного устройства - линейным дифференциальным уравнением
(1.2)
В (1.1) и (1.2) аi'(t), bi'(t) - постоянные или переменные параметры объекта, , - параметры исполнительного устройства, которые, как правило, бывают постоянными, , s,q,r,p - целые числа, и в соответствии с условиями физической реализуемости s ≤q, r≤р.
Уравнение сравнивающего устройства имеет вид
(1.3)
После исключения промежуточных координат у и φ можно записать уравнение движения неизменяемой части САР относительно сигнала ошибки х при наличии внешнего возмущения f, задающего воздействия g и управляющего воздействия u, приложенных к неизменяемой части САР (рис 1.4):
Рис. 1.4
(1.4)
где n=p+q, m=r+s, h=s+p, коэффициенты зависят от величины и их производных (предполагается, что эти производные существуют) [8].
Для простоты дальнейшего изложения будем предполагать, что скорость изменения коэффициентов ai(t),bi(t),ci(t) настолько мала, что во время протекания переходных процессов их можно считать постоянными. Тогда применяя преобразования Лапласа к (1.4), получаем при нулевых начальных условиях
(1.5)
Здесь р — оператор Лапласа, А(р),В(р),С(р) — полиномы от р с постоянными коэффициентами:
(1.6)
Решение уравнения (1.5), вообще говоря, полностью характеризует динамические свойства рассматриваемой системы, а следовательно, и все качественные показатели процесса управления. Используя всю имеющуюся информацию о системе (например, ошибку x и ее производные, задающее воздействие g, а иногда и величину внешних возмущений f), необходимо выбрать управление и таким образом, чтобы это обеспечивало с той или иной степенью точности равенство нулю сигнала ошибки и максимально приближало динамические характеристики САР к желаемым. Способ формирования управления и в виде суммы воздействий по различным переменным и определяет структуру системы автоматического регулирования.
Рассмотрим основные способы формирования управляющего воздействия.
Обратимся вначале к простейшему случаю построения системы стабилизации, когда внешние воздействия на систему отсутствуют, т.е.
и движение системы вызвано ненулевыми начальными условиями. Тогда, если свободное движение неизменяемой части системы, определяемое корнями характеристического уравнения А(р)=0, удовлетворяет всем требованиям, предъявляемым к динамике системы, то величина ошибки может быть сведена к нулю и без управляющего воздействия. Однако чаще всего свойства объекта таковы, что эти требования не выполняются, и, по сути дела, задача состоит в выборе управления, которое соответствующим образом изменяет характеристическое уравнение объекта. Именно в результате этого и достигается устойчивость системы управления неустойчивым объектом, увеличивается скорость протекания переходных процессов, удаётся избежать колебательности и т. д. Из сказанного следует, что одним из возможных способов реализации управления в случае f ≡0 и g≡0 является формирование функции и в виде линейной комбинации координаты ошибки и конечного числа производных:
(1.7)
где - постоянные величины, l - целое число, или в операторной форме
(1.8)
Такой принцип формирования управляющего воздействия называется принципом управления по отклонению, так как в качестве информации о состоянии процесса используется величина отклонения регулируемой координаты от требуемого уровня. Сама система, построенная по этому принципу, является замкнутой системой или системой с обратной связью. Уравнение движения замкнутой системы, согласно (1.5) и (1.8), имеет вид
(1.9)
В (1.9) - линейно зависящие от ai, bi, αx2 коэффициенты характеристического полинома A(р) замкнутой системы,
(1.10)
В результате введения обратной связи закон изменения регулируемой величины определяется характеристическим полиномом (1.10) замкнутой системы, а не А(р), как это было ранее. Очевидно, что изменение влияет на расположение корней характеристического уравнения А(р)=0 на комплексной плоскости. Исходя из условий устойчивости, эти коэффициенты должны быть выбраны такими, чтобы все корни находились слева от мнимой оси. Но помимо устойчивости системы управления предъявляются определенные требования к характеру протекания переходных процессов. Поэтому выбор коэффициентов следует производить с учетом тех или иных критериев качества системы.
Проведенные выше рассуждения позволяют подходить к формированию управления и, исходя из свойств дифференциального уравнения движения объекта.
Рис. 1.5
Рассмотрим теперь специфику различных структурных реализаций выбранного способа управления. Решение, заключается в том, чтобы измерить сигнал ошибки х, продифференцировать его l раз, просуммировать эти сигналы, умноженные на соответствующие коэффициенты, и полученную сумму подать на вход исполнительного устройства. В результате будем иметь структуру, изображенную на рис. 1.5. Особенности такой структуры поясним на простейшем примере системы второго порядка.
(1.11)
(1.12)
В случае управления
(1.13)
уравнение замкнутой системы, согласно (1.11)—(1.13), имеет вид
(1.14)
где
Рис. 1.6
Как уже отмечалось выше, требуемые динамические свойства системы достигаются соответствующим выбором коэффициентов. ax1 , ax2. Выясним, каким образом каждая из этих величин влияет на динамику процесса управления. Непосредственно из рассмотрения корней характеристического уравнения системы (1.14) следует, что увеличение ax1 - коэффициента воздействия по сигналу ошибки х - приводит к колебательности и, как следствие, к ухудшению процесса управления. Для того чтобы избежать этого, необходимо увеличивать аx2 - коэффициент воздействии по производной. Однако излишнее увеличение ax2 приводит к чрезмерному затягиванию переходного процесса. Поэтому даже для этой простейшей структуры (рис. 1.6) выбор коэффициентов аx1 и ax2 нельзя осуществлять независимо друг от друга. Для системы более высокого порядка увеличение коэффициента воздействия по ошибке всегда приводит к неустойчивости. И обычно в линейных структурах (рис. 1.5) требуемое быстродействие и другие качественные показатели процесса управления достигаются за счет одновременного увеличения уровней воздействия по сигналу ошибки и его производным. В то же время необходимо иметь в виду, что увеличение воздействий по производным приводит к усилению высокочастотных помех, которые весьма часто примешиваются к основному сигналу. И если в системе существуют какие-либо ограничения на координаты исполнительного устройства, то в результате система автоматического регулирования может потерять устойчивость.
Следует отметить также, что реализация структуры рис. 1.5 связана с необходимостью иметь дифференцирующие элементы, построение которых является сложной технической задачей. Однако в ряде случаев этого удается избежать, если в системе имеется возможность для измерения каких-либо внутренних её координат.
Перейдем теперь к рассмотрению особенностей построения линейных структур в случае, если динамические свойства объекта меняются от процесса к процессу. Напомним, что правильный выбор коэффициентов воздействия по ошибке и её производным, по сути дела, обеспечивает желаемый вид характеристического уравнения системы. Если поставлена задача сохранить неизменным качество процесса управления при изменении параметров объекта, то для этого следует сохранить неизменным характеристическое уравнение при любых значениях параметров из некоторого диапазона. Поэтому из требования постоянства коэффициентов ai в (1.9), согласно (1.8), (1.10), следует, что величины ax1… являются уже не постоянными величинами, а функциями переменных параметров объекта. Очевидно, что это обстоятельство найдет своё отражение и в структуре системы. Структура системы должна содержать функциональные элементы, осуществляющие измерение параметров объекта, вычисляющие требуемые значения коэффициентов закона управления и перестраивающие коэффициенты воздействия в управляющем устройстве. Основные трудности при реализации построенной таким образом самонастраивающейся системы связаны со сложностью аппаратурного решения и необходимостью в измерении меняющихся параметров объекта.
Рис. 1.7
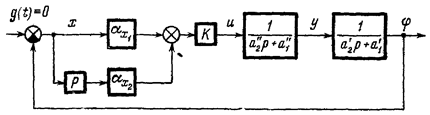
Остановимся еще на одном способе построения линейной структуры, в рамках которой динамические свойства замкнутой системы меняются незначительно, даже если параметры управляемого объекта изменяются в широких пределах. Этот способ основан на увеличении коэффициента усиления разомкнутой системы. В рассматриваемом случае структурная схема системы имеет вид, представленный на рис. 1.8, а ее движение описывается уравнением –
(1.15)
где а*1 , а*2 — коэффициенты, зависящие от параметров объекта и исполнительного устройства к — постоянный коэффициент. [9]
При неограниченном увеличении коэффициента k решение уравнения (1.15) будет приближаться к решению уравнения
(1.16)
которое не зависит от параметров объекта. Соответствующим выбором коэффициентов ax1, аx2 можно наделить решение этого уравнения желаемыми свойствами. Описанный способ компенсации влияния нестационарности характеристик применим, если коэффициенты a*1. и a*2 меняются произвольным образом в ограниченном диапазоне. Эффект, обусловленный введением звена с бесконечно большим коэффициентом усиления, может быть получен в релейной системе, в которой возникает движение с бесконечно большой частотой переключения релейного элемента [14].
Отметим, что реализация структуры, изображенной на рис. 1.7, предполагает наличие дифференцирующего устройства. Как известно, все реальные дифференцирующие устройства обладают погрешностями, обусловленными собственными инерционностями. Увеличение коэффициента k неминуемо приводит к потере устойчивости. Поэтому коэффициент усиления разомкнутой системы можно увеличивать лишь до тех пор, пока не начнут существенным образом сказываться неучтенные инерционности дифференциаторов или других функциональных элементов структуры. Другим обстоятельством, которое всегда следует учитывать при использовании этого метода, является наличие ограничений на координаты системы. Как уже отмечалось выше, в этом случае высокочастотные помехи, неизбежно примешивающиеся к основному сигналу, при увеличении уровня воздействия по производным также могут привести к потере устойчивости.
Все рассмотренные ранее способы формирования структуры, основанные на принципе регулирования по отклонению, относились к системам, работающим в режиме свободных движений. Другими словами, предполагалось, что отсутствуют внешние возмущения и задающее воздействие, а функция управления составляется с использованием информации об отклонении различных координат системы. Однако на практике весьма редко встречаются системы, условия работы которых позволяют пренебречь возмущающими воздействиями. Более того, для ряда производственных процессов именно внешние возмущения, действующие заранее непредсказуемым образом, приводят к необходимости использования средств автоматики.
Пусть в системе регулирования по отклонению, описываемой уравнением (1.5) для случая g(t) 0 и f(t) 0, управляющее устройство представляет собой некоторую совокупность линейных звеньев, осуществляющих дифференцирование, интегрирование, суммирование и т. д. Предположим далее, что на вход УУ поступает информация о величине отклонения регулируемой координаты от требуемого значения. Тогда функция управления u в операторной форме может быть представлена следующим образом:
(1.17)
где к — постоянный коэффициент, Р(р) и Q(p) —. некоторые полиномы от р.
Из (1.5) и (1.17) получаем уравнение движения замкнутой системы автоматического регулирования
(1.18)
Задача управления состоит в выборе такого оператора управляющего устройства (или Р(р)у Q(p) и k), при котором, во-первых, обеспечивается желаемый характер свободного движения в системе и, во-вторых, максимально уменьшается влияние внешних воздействий на координату ошибки. Первая часть задачи уже была рассмотрена. Остановимся теперь на методах, позволяющих уменьшить вынужденную составляющую решения дифференциального уравнения (1.18). В основе этих методов лежит тот факт, что вынужденную составляющую можно сделать достаточно малой или она будет отсутствовать, если правая часть уравнения (1.18) окажется достаточно малой или равной нулю.
Один из возможных способов использования такого подхода заключается в увеличении коэффициента усиления разомкнутой системы. Перепишем уравнение (1.18) в виде
(1.19)
где
Очевидно, что с увеличением коэффициента усиления k правая часть уравнения (1.19) стремится к нулю, а общее решение этого уравнения стремится к решению соответствующего однородного уравнения. Следует, однако, иметь в виду, что от значения коэффициента k зависит не только вынужденное, но и свободное движение системы, и поэтому при увеличении коэффициента усиления k всегда возникает вопрос об устойчивости САР. Как уже упоминалось выше, высокочастотные помехи, неидеальности дифференцирующих устройств, ограничения на координаты системы начинают существенным образом влиять на устойчивость именно при больших коэффициентах усиления. Таким образом, этот принцип применим в тех случаях, когда удается успешно разрешить противоречие между требуемой точностью и устойчивостью системы. Задача управления в значительной степени облегчается, если заранее известен вид внешних воздействий, приложенных к системе [11].
Для решения задач стабилизации и слежения можно предложить совершенно иной подход, основанный на измерении внешних воздействий, приложенных к системе, при условии, что такие измерения физически возможны. Речь идет о так называемом принципе компенсации, который для формирования управления предполагает использование информации о величине внешних воздействий.
Итак, мы рассмотрели методы решения задач стабилизации и слежения, основанные на двух важнейших принципах регулирования - по отклонению и по возмущению, для системы с одной регулируемой величиной и скалярным управлением.
Характерные черты каждого из этих принципов были выявлены на объектах, описываемых обыкновенными линейными дифференциальными уравнениями. Однако на практике часто приходится иметь дело с объектами более сложной природы. Речь идет о многомерных системах
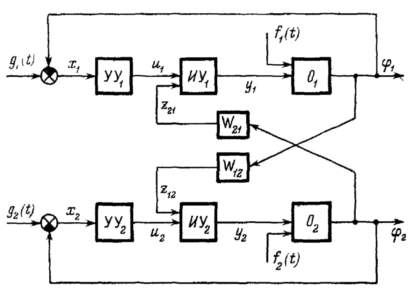
Рис. 1.8
в которых необходимо управлять совокупностью регулируемых величин с помощью нескольких управляющих воздействий. Специфику такой задачи можно пояснить на частном случае взаимосвязанной системы, когда имеется несколько контуров, а процессы управления в каждом из них влияют друг на друга. Если не принимать во внимание наличие связей между регулируемыми величинами и попытаться обеспечить требуемый процесс управления по каждой из них независимо друг от друга, то неучтенное взаимное влияние между отдельными контурами регулирования может значительно ухудшить функционирование системы и даже привести к неустойчивости. Одни из возможных подходов к решению задачи управления многосвязными объектами заключается в том, чтобы сделать движение в каждом из контуров независимым от движения в других
Задача автоматического управления значительно усложняется, если объект регулирования содержит элемент с чистым запаздыванием, так как в этом случае наиболее ярко проявляется противоречие между требованиями точности и устойчивости. Стремление повысить точность приводит к необходимости увеличения коэффициента усиления разомкнутой системы. С другой стороны, в линейной системе с запаздыванием неограниченное увеличение коэффициента усиления приводит к неустойчивости. Например, в линейной системе с постоянными параметрами, содержащей запаздывание, частотная характеристика разомкнутой системы всегда пересекает действительную ось на участке ( , 0). Следовательно, при увеличении коэффициента усиления частотная характеристика будет охватывать точку (-1,0), т. е. система станет неустойчивой. Это противоречие может существенно ограничить применение линейных регуляторов для управления объектами с запаздыванием.
Следует отметить, что существует значительное число задач, в которых помимо требований, предъявляемых к характеру изменения регулируемой величины, выдвигается ряд требований к поведению других координат системы. Зачастую при выборе средств управления эти требования оказываются решающими. Так, например, с точки зрения прочности конструкции величина перегрузки летательного аппарата не должна превосходить некоторой фиксированной величины. Другим примером может служить система стабилизации температуры термохимического процесса, в которой расход воздуха влияет не только на изменение температуры, но и на качество выпускаемой продукции. Для этого процесса перемещение регулирующего органа не должно превосходить его установившегося значения. Для того чтобы удовлетворить этим дополнительным требованиям при использовании линейных регуляторов, приходится в ряде случаев идти на ухудшение динамических показателей переходного процесса по регулируемой координате.
Рассмотренные проблемы, связанные с применением линейных регуляторов, позволяют наметить основной круг задач, для решения которых приходится обращаться к поискам новых методов управления в классе нелинейных систем автоматического регулирования. Перечислим эти задачи.
Основная идея выбора управляющего воздействия для случая свободного движения линейного объекта с постоянными параметрами заключается в том, чтобы соответствующим образом видоизменить характеристическое уравнение неизменяемой части системы, добиваясь требуемого расположения корней в левой части комплексной плоскости. Это зачастую сводится к организации больших уровней воздействий как по сигналу ошибки, так и по его производным, подаваемых на вход исполнительного устройства. В связи с этим возникает задача построения такой системы, в которой увеличение коэффициента воздействия только по координате ошибки не приводит к потере устойчивости.
Высококачественное управление нестационарными объектами с помощью линейных регуляторов в условиях непрерывно действующих возмущений оказывается весьма затруднительным, если не предоставляется возможности для измерения меняющихся параметров объекта и внешних возмущений. В связи с этим возникает задача построения такой системы, в которой при конечных коэффициентах воздействия по различным ее координатам удается обеспечить воспроизводимость регулируемой величиной задающего воздействия без использования информации о возмущениях и меняющихся в широком диапазоне параметрах объекта.
Обеспечение желаемого характера процесса управления и связей, в том числе и автономности, в многомерных системах, как правило, затрудняется отсутствием информации об операторах перекрестных связей. Одной из важнейших задач этой области регулирования является задача построения системы, в которой при отсутствии указанной информации с помощью конечных коэффициентов воздействия достигается желаемая зависимость между различными регулируемыми координатами системы.
Для систем управления объектами с чистым запаздыванием возникает задача выбора такого управляющего устройства, которое позволит существенно повысить коэффициент воздействия по координате ошибки по сравнению с линейной системой, использующей ту же информацию.
При управлении нелинейными объектами наибольший интерес представляет задача отыскания такой структуры, которая обеспечивает достаточно широкую область устойчивости по начальным условиям вблизи точки, соответствующей наиболее производительному режиму.
Для ряда производственных процессов особое значение приобретает задача построения системы регулирования, в которой помимо выполнения требований к качеству переходного процесса какая-либо координата не должна превосходить или некоторого фиксированного значения, или своего установившегося значения. Все перечисленные проблемы касались непосредственно задач управления. Однако при реализации различных алгоритмов возникает самостоятельная задача получения информации о состоянии управляемого процесса, которая в большинстве случаев усложняется присутствием заранее неизвестных помех в различных каналах системы.
Все перечисленные задачи являются в настоящее время весьма актуальными, так как они все чаще и чаще возникают при автоматизации различных областей практической деятельности. Поэтому их успешное разрешение с помощью простых и надежных технических средств, становится одной из центральных задач теории и практики автоматического управления.

 на заданном уровне g - const - задача стабилизации; автоматическое поддержание с заданной точностью равенства регулируемой (выходной) величины объекта
на заданном уровне g - const - задача стабилизации; автоматическое поддержание с заданной точностью равенства регулируемой (выходной) величины объекта 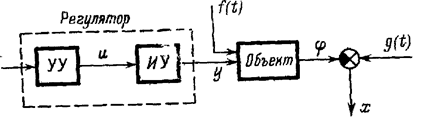
 (1.1)
(1.1) (1.2)
(1.2) ,
,  - параметры исполнительного устройства, которые, как правило, бывают постоянными,
- параметры исполнительного устройства, которые, как правило, бывают постоянными,  , s,q,r,p - целые числа, и в соответствии с условиями физической реализуемости s ≤q, r≤р.
, s,q,r,p - целые числа, и в соответствии с условиями физической реализуемости s ≤q, r≤р. (1.3)
(1.3)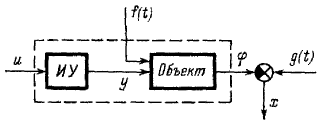
 (1.4)
(1.4) зависят от величины
зависят от величины  и их производных (предполагается, что эти производные существуют) [8].
и их производных (предполагается, что эти производные существуют) [8]. (1.5)
(1.5) (1.6)
(1.6)
 и движение системы вызвано ненулевыми начальными условиями. Тогда, если свободное движение неизменяемой части системы, определяемое корнями характеристического уравнения А(р)=0, удовлетворяет всем требованиям, предъявляемым к динамике системы, то величина ошибки может быть сведена к нулю и без управляющего воздействия. Однако чаще всего свойства объекта таковы, что эти требования не выполняются, и, по сути дела, задача состоит в выборе управления, которое соответствующим образом изменяет характеристическое уравнение объекта. Именно в результате этого и достигается устойчивость системы управления неустойчивым объектом, увеличивается скорость протекания переходных процессов, удаётся избежать колебательности и т. д. Из сказанного следует, что одним из возможных способов реализации управления в случае f ≡0 и g≡0 является формирование функции и в виде линейной комбинации координаты ошибки и конечного числа производных:
и движение системы вызвано ненулевыми начальными условиями. Тогда, если свободное движение неизменяемой части системы, определяемое корнями характеристического уравнения А(р)=0, удовлетворяет всем требованиям, предъявляемым к динамике системы, то величина ошибки может быть сведена к нулю и без управляющего воздействия. Однако чаще всего свойства объекта таковы, что эти требования не выполняются, и, по сути дела, задача состоит в выборе управления, которое соответствующим образом изменяет характеристическое уравнение объекта. Именно в результате этого и достигается устойчивость системы управления неустойчивым объектом, увеличивается скорость протекания переходных процессов, удаётся избежать колебательности и т. д. Из сказанного следует, что одним из возможных способов реализации управления в случае f ≡0 и g≡0 является формирование функции и в виде линейной комбинации координаты ошибки и конечного числа производных: (1.7)
(1.7) - постоянные величины, l - целое число, или в операторной форме
- постоянные величины, l - целое число, или в операторной форме (1.8)
(1.8) (1.9)
(1.9) - линейно зависящие от ai, bi, αx2 коэффициенты характеристического полинома A(р) замкнутой системы,
- линейно зависящие от ai, bi, αx2 коэффициенты характеристического полинома A(р) замкнутой системы, (1.10)
(1.10) следует производить с учетом тех или иных критериев качества системы.
следует производить с учетом тех или иных критериев качества системы.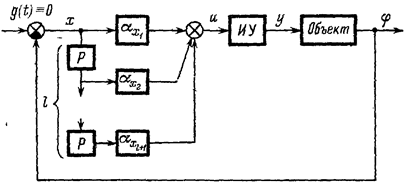
 (1.11)
(1.11) (1.12)
(1.12) (1.13)
(1.13) (1.14)
(1.14)
 являются уже не постоянными величинами, а функциями переменных параметров объекта. Очевидно, что это обстоятельство найдет своё отражение и в структуре системы. Структура системы должна содержать функциональные элементы, осуществляющие измерение параметров объекта, вычисляющие требуемые значения коэффициентов закона управления и перестраивающие коэффициенты воздействия в управляющем устройстве. Основные трудности при реализации построенной таким образом самонастраивающейся системы связаны со сложностью аппаратурного решения и необходимостью в измерении меняющихся параметров объекта.
являются уже не постоянными величинами, а функциями переменных параметров объекта. Очевидно, что это обстоятельство найдет своё отражение и в структуре системы. Структура системы должна содержать функциональные элементы, осуществляющие измерение параметров объекта, вычисляющие требуемые значения коэффициентов закона управления и перестраивающие коэффициенты воздействия в управляющем устройстве. Основные трудности при реализации построенной таким образом самонастраивающейся системы связаны со сложностью аппаратурного решения и необходимостью в измерении меняющихся параметров объекта.
 (1.15)
(1.15) (1.16)
(1.16) 0 и f(t)
0 и f(t)  (1.17)
(1.17) (1.18)
(1.18) (1.19)
(1.19)
 , 0). Следовательно, при увеличении коэффициента усиления частотная характеристика будет охватывать точку (-1,0), т. е. система станет неустойчивой. Это противоречие может существенно ограничить применение линейных регуляторов для управления объектами с запаздыванием.
, 0). Следовательно, при увеличении коэффициента усиления частотная характеристика будет охватывать точку (-1,0), т. е. система станет неустойчивой. Это противоречие может существенно ограничить применение линейных регуляторов для управления объектами с запаздыванием.