Переход от принципиальной схемы к механической цепи является наиболее ответственным этапом процесса математического моделирования физических объектов методом прямой аналогии. На этом этапе необходимо произвести выделение из системы наиболее существенных элементов, которые оказывают влияние на решение поставленной задачи. Здесь каждый элемент представляет графическое изображение одного из физических явлений, происходящих в системе. Далее выделенные элементы соединяются друг с другом линиями взаимного влияния сил и скоростей, возникающих в результате внешнего воздействия. Полученная совокупность взаимосвязанных элементов представляет собой механическую цепь системы. В расчетной работе фигурируют две физических подсистемы: гидравлическая и механическая. В них можно выделять элементы, показанные в табл.13. В реальных физических системах нет участков, которые бы можно было изобразить одним из указанных элементов. Каждый участок (трубопровод, емкость жидкости и т.д.) характеризуется всегда совокупностью элементов. Решение о том, какими элементами должен быть отражен тот или иной участок реальной, системы, принимает исследователь, исходя из поставленной задачи, своего опыта и интуиции. Можно сформулировать общее правило, которым руководствуется исследователь: все физические явления в системе, оказывающие существенное влияние на результат решения поставленной задачи, должны быть отражены в механической цепи и наоборот, несущественными явлениями необходимо пренебречь при решении конкретной задачи, так как иначе это приводит к переусложнению механической цепи и математической модели.
Для соединения выделенных элементов в цепь нужно руководствоваться следующими общими правилами:
1) элементы цепей, находящиеся под действием одного и того же давления I "либо двигающиеся совместно, соединяются параллельно;
2) элементы цепи, обтекаемые одним и тем же потоком либо находящиеся \ под действием одних и тех же усилий, соединяются последовательно; \
3) элементы упругости и сопротивления механической системы включают- L ся между теми участками объекта, с которыми образуют взаимодействие: элементы упругости - между телами, соединенными упругой связью, элементы сопротивления - между контактирующими телами;
4) элемент, инерционности механической системы имеют два полюса, одним полюсом он соединяется с базовым элементом, характеризующим инерционную систему отсчета, другой полюс представляет собственно массу тела и включается с взаимодействующими внешними телами.
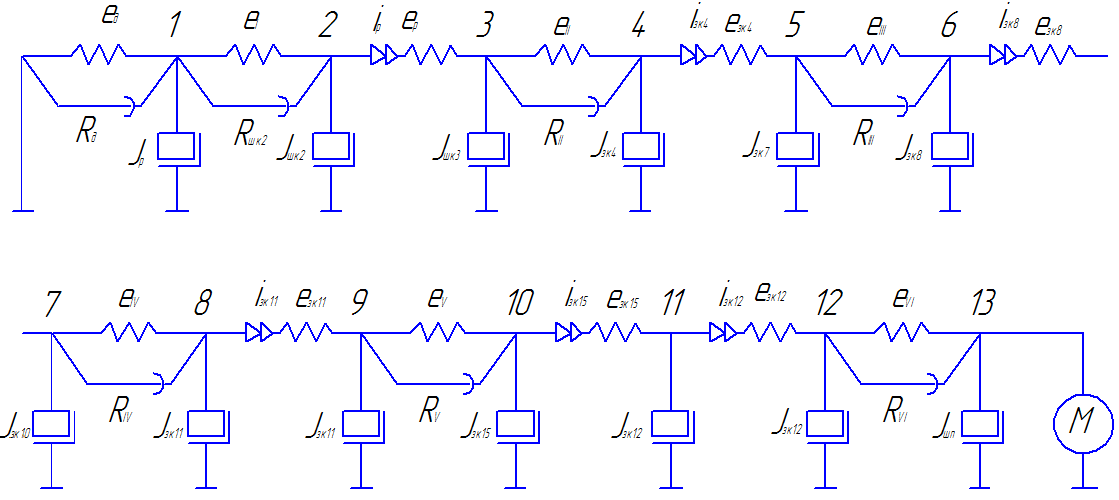
Составленная механическая схема привода вертикально-сверлильного станка представлена на рис. 1.
Первый вал I – вал ротора двигателя. Построение схемы начинается со статора двигателя, рассматриваемого как абсолютно жесткую, неподвижно закрепленную систему. Через податливость электромагнитного поля ротор двигателя с моментом инерции соединен со статором. Также учтем внутреннее сопротивление электромагнитной связи. Ротор через податливость призматической шпонки и вала передает вращение шкиву с моментом инерции , не избегая внутреннего сопротивления .Передача вращения на входной вал коробки скоростей осуществляется ремнем с податливостью .
Второй вал II – входной вал коробки скоростей. Вращение на него передается от ременной передачи с вала ротора электродвигателя. Первым элементом схемы является шкив с моментом инерции . Он через шлицы с податливостью соединен с участком вала с моментом инерции . Сечение на валу проводим посередине между насаженными шкивом и шестерней блока 1, податливость этого участка - , внутреннее сопротивление .От шестерни блока 1 с моментом инерции , движение переходит на третий вал привода (второй вал редуктора) через податливость зубчатой передачи .
Третий вал III – второй вал коробки скоростей привода. Также учитываем связь между второй и третьей подсистемами - . Движение к нему приходит с входного вала через зубчатую передачу . Колесо через податливость шлица соединен с участком вала с моментом инерции . Сечение на валу проводим посередине колеса и колеса , податливость этого участка - , внутреннее сопротивление .
Четвертый вал IV. Движение ему передается с третьего вала через зубчатую передачу . В данном случае передаточное отношение между подсистемами равно . Первым элементом схемы является колесо блока 2 с моментом инерции . Он через шлицы с податливостью соединен с участком вала с моментом инерции . Сечение на валу проводим посередине колеса ,блока 2 и колеса блока , податливость этого участка - , внутреннее сопротивление .
Пятый вал V. Движение ему передается с четвертого вала через зубчатую передачу . В данном случае передаточное отношение между подсистемами равно . Первым элементом схемы является колесо блока 3 с моментом инерции . Он через шлицы с податливостью соединен с участком вала с моментом инерции . Сечение на валу проводим посередине колеса ,блока 3 и колеса блока , податливость этого участка - , внутреннее сопротивление .
Шестой вал VI привода главного движения. Связь представлена в виде . Движение к нему приходит через зубчатую передачу . Колесо через податливость шпонки соединено с участком вала с моментом инерции . Сечение на валу проводим посередине колеса и шпинделя , податливость этого участка - , внутреннее сопротивление .
Соединив вместе расчетные схемы всех валов привода, получим единую схему.

 ротор двигателя с моментом инерции
ротор двигателя с моментом инерции  соединен со статором. Также учтем внутреннее сопротивление
соединен со статором. Также учтем внутреннее сопротивление  электромагнитной связи. Ротор через податливость призматической шпонки и вала
электромагнитной связи. Ротор через податливость призматической шпонки и вала  передает вращение шкиву с моментом инерции
передает вращение шкиву с моментом инерции  , не избегая внутреннего сопротивления
, не избегая внутреннего сопротивления  .Передача вращения на входной вал коробки скоростей осуществляется ремнем с податливостью
.Передача вращения на входной вал коробки скоростей осуществляется ремнем с податливостью  .
. . Он через шлицы с податливостью
. Он через шлицы с податливостью  соединен с участком вала с моментом инерции
соединен с участком вала с моментом инерции  . Сечение на валу проводим посередине между насаженными шкивом и шестерней
. Сечение на валу проводим посередине между насаженными шкивом и шестерней  блока 1, податливость этого участка -
блока 1, податливость этого участка -  , внутреннее сопротивление
, внутреннее сопротивление  .От шестерни
.От шестерни  .
. . Движение к нему приходит с входного вала через зубчатую передачу
. Движение к нему приходит с входного вала через зубчатую передачу  . Колесо
. Колесо  через податливость шлица
через податливость шлица  , внутреннее сопротивление
, внутреннее сопротивление  .
. . В данном случае передаточное отношение между подсистемами равно
. В данном случае передаточное отношение между подсистемами равно  . Первым элементом схемы является колесо блока 2 с моментом инерции
. Первым элементом схемы является колесо блока 2 с моментом инерции  . Он через шлицы с податливостью
. Он через шлицы с податливостью  , податливость этого участка -
, податливость этого участка -  , внутреннее сопротивление
, внутреннее сопротивление  .
. . В данном случае передаточное отношение между подсистемами равно
. В данном случае передаточное отношение между подсистемами равно  . Первым элементом схемы является колесо блока 3 с моментом инерции
. Первым элементом схемы является колесо блока 3 с моментом инерции  . Он через шлицы с податливостью
. Он через шлицы с податливостью  , податливость этого участка -
, податливость этого участка -  , внутреннее сопротивление
, внутреннее сопротивление  .
. . Движение к нему приходит через зубчатую передачу
. Движение к нему приходит через зубчатую передачу  . Колесо
. Колесо  через податливость шпонки
через податливость шпонки  соединено с участком вала с моментом инерции
соединено с участком вала с моментом инерции  . Сечение на валу проводим посередине колеса
. Сечение на валу проводим посередине колеса  , податливость этого участка -
, податливость этого участка -  , внутреннее сопротивление
, внутреннее сопротивление  .
.