Разложение вектора А на составляющие в декартовой системе координат:
(1.1)
Сложение векторов сводится к сложению их компонент:
(1.2)
Скалярное произведение векторов А и В равно произведению их модулей на косинус угла между векторами:
(1.3)
Здесь α - угол между направлениями векторов.
Результат скалярного умножения есть скаляр.
Скалярное произведение (А, В) может равняться нулю и при не равных нулю А и В, если cos α = 0. Такие векторы называются ортогональными, так как они направлены под прямым углом.
Векторное произведение векторов А и В вычисляется по следующей формуле:
(1.4)
Здесь ν0 - орт, направленный по нормали к плоскости, образуемой векторами А и В. Направление орта выбирается так, чтобы, из его начала минимальный угол соответствовал движению от А к В по часовой стрелке. В формуле (1.4) этот угол обозначен α.
Результат векторного умножения двух векторов есть вектор.
Если раскрыть определитель, получим, например, что [А, B]х = AyBz - AzBy и т. д. Изменение порядка сомножителей приводит к изменению знака векторного произведения: [В, А] = -[А, В].
Для трех векторов А, В, Е определено следующее произведение:
Оно называется векторно-скалярным, или смешанным: один из векторов составляет скалярное произведение с векторным произведением двух оставшихся. Очевидно, что справедливо следующее соотношение:
(1.5)
При составлении смешанного произведения должен быть сохранен циклический порядок следования векторов: А, В, Е, А, В, Е...
Двойное векторное произведение трех векторов А, В, Е раскрывается по следующей формуле:
(1.6)
Здесь скалярные произведения обозначены посредством круглых скобок. Они участвуют в умножении как числа.
1.2. Линейные преобразования векторов
Под умножением вектора А на скаляр m понимается получение такого вектора В, модуль которого увеличивается в m раз, а направление не меняется:
(1.7)
Это равенство равносильно трем скалярным:
(1.7а)
Вектора A и В коллинеарны. Если m - положительное число, то векторы А и В направлены одинаково, а при отрицательном m - противоположно.
В общем случае под однородным линейным преобразованием векторов понимают сопоставление вектору А такого вектора В, компоненты которого определяются по формулам:
(1.8)
Здесь mхх, mху, ..., mzy, mzz - некоторые числа.
Однородность - это свойство, в силу которого В = 0, если А = 0. Векторы А и В, компоненты которых связаны соотношениями (1.8), уже не коллинеарны. Следовательно, записанное преобразование определяет не только изменение абсолютного значения вектора, но и его поворот.
(1.9)
Коэффициенты при компонентах вектора А можно свести в таблицу:
С точки зрения линейной алгебры таблица чисел (1.9) образует матрицу. Равенства (1.8) определяют операцию умножения матрицы ||m|| на вектор-столбец (Ах, Ау, Аz). Эта операция приводит к получению нового вектора-столбца (Вх, Ву, Bz). В частном случае, задаваемом формулой (1.7), отличны от нуля только диагональные компоненты матрицы ||m||, причем mxx = myy = mzz = m.
Введем единичную матрицу следующего вида:
(1.10)
Это позволяет определить матрицу ||m|| в варианте (1.7а) как mI. С учетом сделанных преобразований систему равенств (1.8) можно записать в сокращенной форме:
(1.11)
1.3. Поля и операции векторного анализа
Скалярное поле можно наглядно отобразить при помощи семейства поверхностей уровня. Для поля, описываемого функцией ψ(х, у, z), уравнение этих поверхностей можно записать в следующем виде:
,
где Ci - константы.
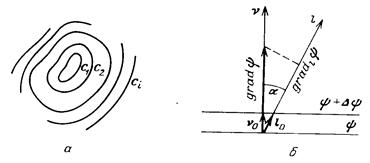
Рис. 1.1. К определению градиента
На рис. 1.1,а показан пример сечения такого семейства плоскостью чертежа.
Градиентом называется вектор, показывающий направление наибольшего изменения скалярного поля ψ(p).
Он определяется следующим соотношением:
(1.12)
Здесьν0 - орт, направленный в сторону максимального возрастания ψ.
Смысл формулы (1.12) легко понять, рассматривая участок двух близких поверхностей уровня, изображенных на рис. 1.1,б. Проекция вектора grad ψ на некоторое направление l определяется следующим образом:
Эта величина становится максимальной, когда орт l0 совпадает с v0, то есть соs α = 1. Обозначим рассматриваемую проекцию gradl ψ. В результате получим следующую формулу:
(1.13)
По этой формуле проекции градиента ψ в декартовой системе должны быть записаны в следующем виде:
(1.14)
В цилиндрической и сферической системах координат формулы для вычисления градиента имеют вид:
(1.14а)
(1.14б)
Векторное поле, определяемое оператором А = grad ψ, называется потенциальным.
Скалярная функция ψ называется потенциалом.
Поверхности уровня, на которых ψ = const, называются эквипотенциальными поверхностями.
Для наглядного отображения векторных полей можно построить картины векторных или силовых линий.
Векторные линии – это линии, касательные к которым в каждой точке указывают направление вектора.
Густота силовых линий может соответствовать интенсивности поля. В этом случае количество векторных линий, проходящих через ортогональную площадку, должно быть пропорционально абсолютному значению вектора. Здесь полагается, что в пределах площадки абсолютное значение вектора постоянно.
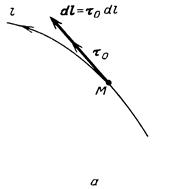
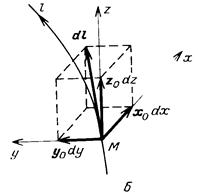
Векторный дифференциал длины вдоль некоторой линии l - это вектор, направленный по касательной. По абсолютному значению он равен скалярному дифференциалу dl. Определение векторного дифференциала иллюстрирует рис. 1.2,а. В декартовых координатах векторный дифференциал может быть представлен проекциями на оси (рис. 1.2,б):
(1.15)
Рис. 1.2. Определение
векторного дифференциала
Пусть задано векторное поле v(х, у, z), которое надо описать посредством векторных линий. Выразим вектор v в декартовых координатах:
Далее потребуем, чтобы выполнялось условие пропорциональности вектора и векторного дифференциала:
Здесь k - произвольная константа. Приравняем компоненты векторов v и dl. Получим:
(1.16)
Это система двух дифференциальных уравнений, интегрирование которых приводит к уравнениям векторных линий.
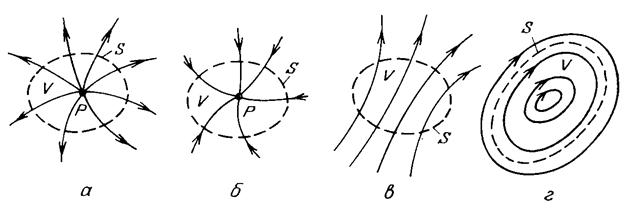
На рис. 1.3 показано несколько характерных типов картин силовых линий, которые могут встретиться при исследовании векторного поля в области V с граничной поверхностью S.
На рис. 1.3,а изображена область, содержащая исток - точку, из которой расходятся все силовые линии.
Стоком называется точка, в которую все силовые линии сходятся. Картина силовых линий, соответствующая стоку, приведена на рис. 1.3,б.
Силовые линии могут также проходить область насквозь, как на рис. 1.3,в или не пересекать ее поверхности S (r), как на рис. 1.3.в.
Рис. 1.3. Типичные картины силовых линий векторного поля
В векторном анализе существует операция, позволяющая устанавливать, имеет ли заданное поле источники или стоки. Введем сначала представление о потоке вектора F через поверхность S, не обязательно замкнутую. Поток вектора определяется интегралом:
(1.17)
Здесь векторный дифференциал ds понимается как произведение обычного (скалярного) дифференциала поверхности ds на орт нормали vo. То есть ds = v0ds. Поэтому Fds = Fvds, как показано на рис. 1.4,а.
Рис. 1.4. Определение потока вектора
Если поверхность S - замкнутая, то символ интеграла дополняется кружком. Тогда v0 - орт внешней нормали к поверхности S. Для незамкнутой поверхности направление орта v0 выбирается произвольно.
Поток вектора F положителен, если силовые линии выходят из поверхности S наружу, и отрицателен, если они входят внутрь. Это обусловлено тем, что в первом случае угол между векторами F и v0 острый, а во втором - тупой.
Поток вектора может измеряться числом его линий, выходящих из поверхности, если их плотность линий соответствует интенсивности поля. Для доказательства этого утверждения обратимся к рис. 1.4,б. Элементарный поток ΔФ, проходящий через площадку ΔS, равен FΔS┴. Здесь ΔS┴ - площадка, ортогональная направлению силовых линий. При этом выполняется следующее соотношение:
где ΔN - число силовых линий, проходящих через ортогональную площадку, k - коэффициент пропорциональности.
В то же время ΔN - это число силовых линий, проходящих через элемент поверхности ΔS. Таким образом, оказывается, что для элемента потока выполняется следующее соотношение:
Поэтому полный поток Ф через поверхность S определяется выражением:
где N - число силовых линий, выходящих через S.
Выходящие наружу силовые линии рассматриваются как «положительные», а входящие внутрь - как «отрицательные». Следует иметь в виду, что картины силовых линий не могут точно описать векторные поля. Поэтому последнее равенство является приближенным.
Дивергенцией называется скалярное поле, характеризующее плотность распределения источников векторного поля F(p).
Ее величина определяется следующим соотношением:
(1.18)
Дивергенция есть скалярная функция координат. По формуле (1.18) определяется ее значение в точке, окрестностью которой является объем ΔV. Этот объем ограничивает поверхность S. Если в формуле (1.18) поток вектора F через поверхность S обозначить как ΔФ, получим:
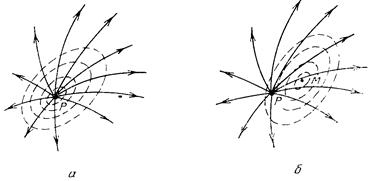
Точка является источником силовых линий, если div F > 0; если div F < 0, то точка является стоком. При div F = 0 линии не начинаются и не заканчиваются в рассматриваемой точке. Чтобы убедиться в этом, вернемся к картине силовых линий, изображенных на рис. 1.3,а.
Рис. 1.5. Дивергенция векторного поля
На рис. 1.5,а для такого поля показано несколько последовательных положений замкнутой поверхности S, сжимающейся к точке Р. Через каждую такую поверхность выходит одно и то же число силовых линий, поэтому поток вектора все время постоянен и положителен. Положительна и дивергенция, вычисляемая по формуле (1.18).
Пусть теперь поверхность S, уменьшаясь, сжимается к другой точке М, как на рис. 1.5,б. Видно, что с некоторого момента число силовых линий, выходящих через поверхность S, станет равным числу входящих линий. Т. е. поток вектора обратится в нуль. Поэтому величина div F, вычисляемая по формуле (1.18), для всех точек за исключением Р, окажется равной нулю.
Легко убедиться, что в декартовой системе координат дивергенция определяется выражением:
(1.19)
В цилиндрической и сферической системах координат формулы для вычисления дивергенции имеют следующий вид:
(1.19а)
(1.19б)
Дивергенция есть дифференциальная операция над компонентами вектора, приводящая к получению скалярной величины.
Ротором вектора F называют вектор, проекция которого на направление ν в некоторой точке, окрестностью которой является площадка ΔS, определяется соотношением:
(1.20)
Здесь ν0 – орт нормали к площадке ΔS, L – граничный контур площадки ΔS, согласованный с ортом ν0 правовинтовой системой. Фигурирующий в формуле (1.20) интеграл называется циркуляцией вектора F по замкнутому контуру L.
Пользуясь формулой (1.20), найдем проекции вектора rot F в декартовой системе координат. В результате получим:
(1.21)
Ротор есть дифференциальная операция над компонентами вектора F, приводящая к получению новой векторной величины.
Формула (1.21) не очень удобна для непосредственных вычислений, поэтому ниже приведены выражения, представленные в проекциях векторов:
декартова система координат
цилиндрическая система координат
(1.21а)
(1.21б)
сферическая система координат
(1.21в)
Для всякого потенциального поля F = grad ψ всегда выполняется тождество:
(1.22)
Формулу (1.22) легко получить при помощи соотношений (1.14) и (1.21). Поэтому потенциальное поле называют также безвихревым.
Поля, для которых div F = 0, называют соленоидальными. Для соленоидальных полей справедливо тождество:
(1.23)
Таким образом, соленоидальны поля F = rot V.
Если в некоторой области поле не является соленоидальным, причем в каждой точке div F ≠ 0, то все точки области - это источники или стоки.
Потенциальные поля F, для которых rot F = 0, могут быть одновременно и соленоидальными, для которых div F = 0. Такие поля называются гармоническими.
Далее приведены основные тождества векторного анализа:
(1.24)
(1.25)
(1.26)
(1.27)
(1.28)
(1.29)
Оператор Гамильтона (набла) определяется следующим образом:
(1.30)
Применение оператора набла к векторам и скалярам поясняют следующие тождества:
,
,
При помощи формул (1.14) и (1.19), можно составить величину div grad ψ, которая истолковывается как набла квадрат:
(1.31)
В декартовой системе координат применение оператора набла квадрат дает следующий результат:
(1.32)
Здесь - оператор Лапласа.
1.4. Интегральные формулы векторного анализа
Теорема Остроградского-Гаусса
(1.33)
Теорема Стокса:
(1.34)
Теорема Грина (первая формула)
(1.35)
Теорема Грина (вторая формула)
(1.36)
Аналог теоремы Остроградского - Гаусса для ротора:
(1.37)
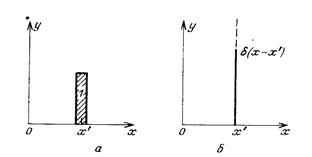
Рис. 1.6. Дельта-функция Дирака
Все выписанные соотношения имеют характер формул интегрирования по частям. При этом объемный интеграл сводится к интегралу по замкнутой границе в виде поверхности S, а поверхностный - к интегралу по замкнутому контуру L.
1.5. Дельта-функция Дирака
Дельта-функция Дирака вводится следующим образом. Рассмотрим прямоугольный импульс площадью равной единице. Он изображен на рис. 1.6,а. Устремим ширину импульса к нулю, сохраняя его площадь постоянной. В результате получим функцию, значение которой не ограничено в точке x' (рис. 1.6,б), а во всех остальных точках равно нулю. Это и есть дельта-функция Дирака, которая обозначается δ(x - x').
Можно утверждать, что для всякой обычной функции f(x) будет справедливо равенство:
(1.38)
Равенство (1.38) является определением дельта-функции посредством функционала. В частности, при f(x) = 1 получим:
(1.39)
Определение (1.38) обобщается на трехмерные области следующим образом:
(1.40)
В этой записи точка задается при помощи радиус-вектора r. В качестве частного случая можно взять f(r) = 1 и получить аналог формулы (1.39).












 ,
,



















 ,
,
 ,
,


 - оператор Лапласа.
- оператор Лапласа.