Для реверса 3-фазного асинхронного электродвигателя надо поменять местами ( пе
реключить ) два любых линейных провода.
При этом поменяется порядок чередования фаз обмотки статора, что приведет к из-
менению направления вращения ( реверсу ) магнитного потока обмотки статора.
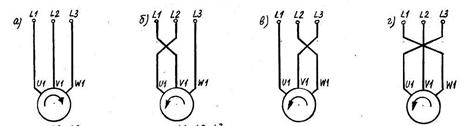
Рис. 4.18. Прямое ( а ) и обратное ( б, в, г ) направление вращения ротора
3-фазного асинхронного двигателя
На рис. 4.18, а изображена схема, соответствующая условному прямому направле-
нию вращения ротора двигателя ( по часовой стрелке ).
Из схемы следует, что выводы питающей сети и обмотки статора соединены попар
но, а именно: вывод L1 соединен с выводом U1, вывод L2 - с выводом V1, вывод L3 – с выво
дом W1 ( L1- U1, L2 - V1, L3 – W1 ).
На рис. 4.18, б переброшены линейные провода L1 и L2 , на рис. 4.18, в – провода L2 и L3, на рис. 4.18, г - провода L1 и L3.
В каждом из этих случаев на обмотке статора меняется порядок чередования фаз питающей сети ( по отношению к рис. 4.18, а ), и двигатель реверсирует.
Поэтому на практике не имеет значения, какие именно два линейных провода бу-
дут переброшены ( переключены ).
Для реверса асинхронного двигателя применяют 2-полюсные или 3-полюсные ре-
версивные контакторы ( рис. 4.19 ).
.
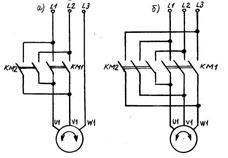
Рис. 4.19. Схема реверса 3-фазного асинхронного двигателя при помощи 2-полюс-
ных ( а ) и 3-полюсных ( б ) реверсивных контакторов
В схеме на рис. 4.19, а использованы 2-полюсные реверсивные контакторы КМ1 и КМ2, на рис. 4.19, б – треполюсные.
В обеих схемах для реверса переключаются линейные провода L1 и L2.
В схеме на рис. 4.19, б правый контакт контактора КМ1 и левый контакт контак
тора КМ2 включены параллельно друг другу, т.е. поочередно подключают к выводу W1обмотки статора один и тот же провод L3 как при прямом, так и обратном направлении вращения ротора двигателя.
Схема на рис. 4.19, а позволяет использовать менее дорогие 2-полюсные контакто-
ры, но имеет повышенную опасность для обслуживающего персонала, т.к. линейный про-
вод L3 постоянно подключен к обмотке статора двигателя.
§ 4.8. Устойчивость работы асинхронных двигателей
Под устойчивостью понимают способность асинхронного двигателя продолжать работу в двигательном режиме в случае изменения параметров питающей сети ( напряже-
ния, частоты тока ), самого двигателя ( изменение сопротивления цепи фазного ротора ) и
механизма ( увеличение его статического момента ).
Устойчивая работа асинхронного двигателя возможна, если выполняется условие
М < М ,
где М - критический ( максимальный ) момент двигателя;
М - статический момент механизма.
Если это условие нарушается, т.е. если М < М , двигатель переходит в режим опрокидывания.
Под опрокидыванием понимают аварийный режим асинхронного двигателя; при ко-
тором он останавливается или реверсирует.В судовых условиях наиболее вероятная причи
на опрокидывания – провал напряжения судовой сети вследствие пуска мощного приемни
ка электроэнергии, например, компрессора или подруливающего устройства, мощность ко
торых составляет сотни кВт.
При провале напряжения критический момент двигателя, пропорциональный квад-
рату напряжения (М ≡ U ) , резко уменьшается.
Асинхронные двигатели механизмов с реактивным статическим моментом (насосов, вентиляторов) при опрокидывании останавливаются ( рис.4.20, а ) и переходят в режим стоянки под током, с активным – реверсируют и разгоняются с ускорением ( рис. 4.20, б ).
Рис. 4.20. Переходные процессы при опрокидывании двигателя: а – при реактивном статическом моменте; б – при активном статическом моменте
Рассмотрим опрокидывание двигателя при реактивном моменте механизма ( рис.
4.20, а ).
До провала напряжения двигатель работает на естественной механической характе-
ристике ( ЕМХ ) в точке А с постоянной скоростью ω .
При провале напряжения двигатель переходит из точки А на ЕМХ в точку В на искусствен
ной механической характеристике ( ИМХ ). Скорость электродвигателя не успевает изме-
ниться вследствие инерции движущихся частей электропривода, поэтому в точке В скорость такая же, как и в точке А.
Поскольку в точке В момент двигателя М меньше момента механизма М , двига
тель начинает уменьшать скорость до точки С. В этой точке критический ( максимальный ) мо-
мент двигателя М' < М , поэтому двигатель продолжит уменьшать скорость до точки Д.
В этой точке двигатель остановится и будет стоять под током с моментом короткого за-
мыкания М до тех. пор, пока не сработает тепловая защита.
Механизмы с активным статическим моментам ( грузовые лебёдки, брашпили) при опрокидывании реверсируют под действием веса груза или якоря.(рис. 4.20, б ).
Переходный процесс при провале напряжения сначала протекает так же, как в предыдущем случае.
Однако после перехода двигателя в точку Д, двигатель не остановится, а сразу же ре-
версирует и станет разгоняться в обратном направлении ( точки F , F , F ). Поскольку знак электромагнитного момента двигателя не изменился, т.е. направлен в сторону подъёма груза, двигатель перейдёт в режим тормозного спуска и будет стараться уменьшить скорость спус-
ка груза
Однако при этом скорость спуска груза будет непрерывно увеличиваться. Это объясняется тем, что величина тормозного момента двигателя по мере перехода из точки F в точку F и далее в точку F непрерывно уменьшается ( М < М < М ).
Если электродвигатель своевременно не отключить от сети и не затормозить механи-
ческим тормозом, это приведёт к аварии.
Правила Регистра устанавливают жёсткие требования к качественным показателям электроэнергии на судах.
В частности, при набросе на синхронный генератор 100% нагрузки провал напряже-
ния не должен быть больше ( - 20% ), заброс - не больше ( + 15% ), время переходного про
цесса- не более 1,5 с, точность восстановления напряжения после наброса – ( ± 3% ) номи
нального напряжения.
§ 4.9. Синхронные двигатели
На судах синхронные двигатели применяются на электроходах.
Впервые эти двигатели были использованы на пассажирском лайнере, построен-
ном в довоенной Германии. Это судно имело 2-вальную гребную дизель-электрическую установку.
После войны лайнер по репарации был передан Черноморскому пароходству под названием «Россия» и использовался для перевозки пассажиров и грузов вначале на меж-
дународных линиях, а затем на внутренних в пределах Черного моря на Крымско-Кавказ-
Электрические машины обратимы, т.е. любой генератор можно при параллельной работе перевести в двигательный режим.
Аналогично, любой электродвигатель, например, электродвигатель лебедки, мож-
но перевести в генераторный режим, при котором двигатель начинает преобразовывать кинетическую энергию опускаемого с большой скоростью груза в электрическую и воз-
вращать её в судовую сеть.
За счет этой возвращаемой энергии основные генераторы ( есть аварийные ) судо-
вой электростанции разгружаются по мощности.
Из принципа обратимости следует, что устройство синхронных генераторов и син-
хронных двигателей одинаково ( см.. например, рис. 8.7 ).
Обратим внимание на характерную особенность синхронного двигателя.
При пуске двигатель включают в сеть 3-фазного переменного тока, после чего в об
мотке статора образуется магнитное поле, вращающееся с большой скоростью ( напри-
мер, 1500 об/мин ).
При такой разнице скоростей поля статора ( 1500 об/мин ) и ротора ( 0 об/мин ) устойчивая магнитная связь между полюсами статора и ротора не возникает.
Поэтому магнитное поле обмотки статора не в состоянии увлечь массивный ротор за собой.
Значит, для образования устойчивой связи между магнитными полями обмотки ста
тора и полюсов ротора последний предварительно надо разогнать до скорости, близкой к скорости поля статора ( ещё лучше, если эти две скорости равны ).
В настоящее время для пуска синхронных двигателей применяют т.н. асинхронный способ пуска ( рис. 4.21 ).
Для пуска включают обмотку статора в сеть 3-фазного переменного тока.
В обмотке статора возникает вращающееся магнитное поле, которое пересекает проводники короткозамкнутой обмотки на роторе и индуктируют в каждом из них ЭДС.
Поскольку проводники вместе с кольцами образуют короткозамкнутую цепь, через
них начинает протекать ток. Его направление для какого-то момента времени показано черными стрелками.
На каждый проводник с током со стороны вращающегося поля действует электро-
магнитная сила , направление которой определяют по правилу левой руки.
Как следует из рис. 4.21, б, эта сила начинает вращать ротор в направлении по часо
вой стрелке.
Иначе говоря, вращающееся магнитное поле начинает увлекать ротор за собой.
Как только скорость ротора достигнет значения, близкого к скорости магнитного поля, переключатель П переводят в нижнее положение и тем самым подают в в обмотку ротора постоянный ток.
Далее ротор двигателя автоматически втягивается в синхронизм, и его скорость ста
новится равной скорости вращающегося поля обмотки статора.
Пуск закончен.
Назначение разрядного резистора объясняется так.
При включении обмотки статора в сеть вращающееся магнитное поле статора пере
секает проводники обмотки ротора и индуктирует в них ЭДС ( точно так же, как и в пуско
вой обмотке ).
При этом в обмотке возбуждения индуктируется значительная ЭДС.
Если бы обмотка ротора оставалась разомкнутой, то при такой ЭДС был бы возмо-
жен пробой изоляции рядом расположенных проводников обмотки.
В случае, если обмотка ротора замкнута на разрядный резистор r, в замкнутой це-
пи, состоящей из последовательно соединенных обмотки и резистора, потечет ток.
В результате напряжение между выводами И1 и И2, резко уменьшится за счет обра
зования падения напряжения на обмотке и резисторе: < Е.
Для сравнения: это же уравнение при разомкнутой обмотке возбуждения ( тока в

 < М
< М  ,
, ) , резко уменьшается.
) , резко уменьшается.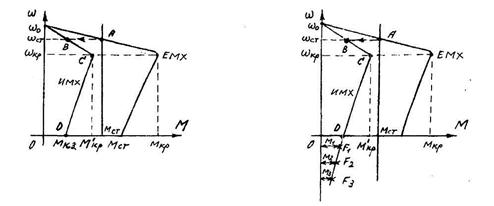
 меньше момента механизма М
меньше момента механизма М  до тех. пор, пока не сработает тепловая защита.
до тех. пор, пока не сработает тепловая защита. , F
, F  , F
, F  ). Поскольку знак электромагнитного момента двигателя не изменился, т.е. направлен в сторону подъёма груза, двигатель перейдёт в режим тормозного спуска и будет стараться уменьшить скорость спус-
). Поскольку знак электромагнитного момента двигателя не изменился, т.е. направлен в сторону подъёма груза, двигатель перейдёт в режим тормозного спуска и будет стараться уменьшить скорость спус-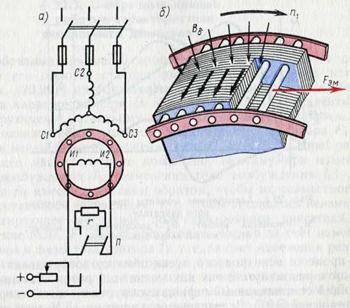
 , направление которой определяют по правилу левой руки.
, направление которой определяют по правилу левой руки. < Е.
< Е. .
.