Из курса электрических машин известно, что электромагнитный момент ТАД описывается выражением [Н*м]
М = , (***)
где m - число фазных обмоток статора (m = 3 );
р – число пар полюсов обмотки статора;
U - фазное напряжение обмотки статора, В;
R ' – приведенное активное сопротивление одной фазной обмотки ротора, Ом;
s – скольжение ротора;
f - частота тока питающей сети, Гц;
Х - индуктивное сопротивление одной фазной обмотки статора; Ом;
Х ' – приведенное индуктивное сопротивление одной фазной обмотки ротора, Ом;
Поскольку в правой части (***) все параметры, кроме скольжения s, есть величины постоянные, т.е. не изменяющиеся при изменении нагрузки на двигатель, это выражение представляет собой уравнение механической характеристики асинхронного двигателя,
т.е. зависимость М ( s ).
Из (***) следует:
1. электромагнитный момент асинхронного двигателя пропорционален квадрату
напряжения питающей сети. Это означает, что асинхронные двигатели крайне чувствии
тельны к колебаниям напряжения судовой сети.
Действительно, например, при провале напряжения на 20%, что допускается Прави
лами Регистра при набросе 100% нагрузки на синхронный генератор, новые значения на
пряжения и электромагнитного момента составят соответственно:
U' = 0,8 U ; М' = ( M = 0,64 M ,
т.е. момент уменшится на 36%.
Это опасно, т.к. у механизмов, в которых электродвигатель преодолевает действие силы тяжести ( грузовые лебёдки, краны ), это может привести к реверсу электропривода, т.е. вместо подъёма произойдёт аварийный спуск.
У механизмов же, в которых электродвигатель преодолевает действие сил трения
( насосы, вентиляторы, компрессоры), это может привести к остановке электропривода, двигатель при этом перейдёт в режим стоянки под током.
График естественной механической характеристики асинхронного двигателя, построенный на основании уравнения ( *** ), показан на рис. 4.6
На этой характеристике можно выделить характерные точки и участки:
1. точка А:
режим пуска, скольжение s = 1, двигатель развивает электромагнитный пусковой момент М , который больше статического момента механизма М , и поэтому начинает разго-
няться по участку АВ характеристики;
2. участок АВ: двигатель увеличивает скорость, скольжение s уменьшается, а элек
тромагнитный момент М увеличивается; этот процесс одновременного увеличения скоро-
сти и момента продолжается до т. В;
3. точка В: электродвигатель развивает критический ( максимальный ) момент
М . Этому моменту соответствует критическое скольжение, которое на практике состав
ляет s = 0,,1…0,2.
4. участок ВС:
поскольку в точке В критический момент М больше статического М ,двига-
тель продолжает разгоняться по участку ВС характеристики до точки С.
При этом скорость увеличивается, скольжение s уменьшается, но, в отличие от участка АВ, электромагнитный момент М начинает уменьшаться вплоть до номинального момента М = М в точке С,
5. точка С:номинальный режим ; в этой точке убывающий электромагнитный мо-
мент двигателя М и статический момент механизма М сравняются, двигатель переста-
нет разгоняться и станет вращаться с неизменной скоростью ω . В этой точке скольже-
ние s =0,01…0,06, в зависимости от типа асинхронного двигателя;
6. участок СD:если сторонними, т.е. не электромагнитными, например, механиче
скими силами заставить ротор разгоняться дальше, электромагнитный момент продолжит уменьшаться, и в точке С исчезнет. Такое ускорение ротоа возможно при спуске груза,
когда ротор раскручивается под действием груза;
точка С : режим идеального холостого хода, или, иначе, синхронный режим, ско-
рости ротора и магнитного поля обмотки статора одинаковы ( ω = ω ), э.д.с. в роторе не индуктируется, поэтому ток и электромагнитный момент ротора равны 0.
Если и после точки 0 ротор продолжать разгонять сторонними силами, он будет вращаться быстрее магнитного поля обмотки статора ( n > n , например, со скоростью n =
= 1550 об/мин, что больше синхронной скорости n = 1500 об/мин ).
Скольжение ротора
s =
при n > n станет отрицательным, и двигатель перейдет в генераторный режим, возвращая электроэнергию в сеть. Знак электромагнитного момента двигателя изменится на обрат-
ный.
Поскольку при n > n отрицательны как скольжение s, так и электромагнитный мо
мент М, характеристика перейдет из 1-го квадранта в 3-й.
В этом квадранте асинхронный двигатель работает как асинхронный генератор в режиме рекуперативного торможения ( рекуперация – возвращение электроэнергии в сеть ).

 , (***)
, (***) - число фазных обмоток статора (m
- число фазных обмоток статора (m  ' – приведенное активное сопротивление одной фазной обмотки ротора, Ом;
' – приведенное активное сопротивление одной фазной обмотки ротора, Ом; ; М' = (
; М' = ( 
 M
M 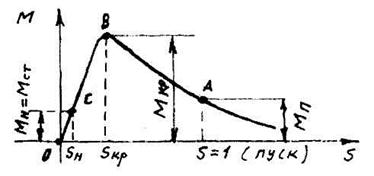
 , который больше статического момента механизма М
, который больше статического момента механизма М  , и поэтому начинает разго-
, и поэтому начинает разго- . Этому моменту соответствует критическое скольжение, которое на практике состав
. Этому моменту соответствует критическое скольжение, которое на практике состав = 0,,1…0,2.
= 0,,1…0,2. = М
= М  ), э.д.с. в роторе не индуктируется, поэтому ток и электромагнитный момент ротора равны 0.
), э.д.с. в роторе не индуктируется, поэтому ток и электромагнитный момент ротора равны 0. , например, со скоростью n =
, например, со скоростью n =
