Уравнения ( 4 ) и ( 7 ) естественных электромеханической и механической характе-
ристик – это линейные уравнения.
Из курса алгебры известно, что графики линейных уравнений представляют собой
прямые линии, которые можно построить по двум точкам.
В алгебре для получения координат этих точек поступают так:
1. принимают равным нулю значение координаты, откладываемой по оси абсцисс и из
уравнения находят значение координаты, откладываемой по оси ординат;
2. наоборот, принимают равным нулю значение координаты, откладываемой по оси
ординат и из уравнения значение координаты, откладываемой по оси абсцисс.
Применим эти два правила для получения координат двух точек сначала электроме
ханической, а затем механической характеристик.
Имея уравнение электромеханической характеристики
ω = -
выполним первое правило, примем I = 0 и подставим это значение в уравнение
характеристики:
ω = - = - = ( 10 )
Это найденное при I = 0 значение скорости называется скоростью идеального
холостого хода и обозначается ω . Окончательно:
ω = ( 11 ) .
Рис. 3.2. Естественные электромеханическая ( а ) и механическая ( б ) характеристики двигателя паралельного ( независимого ) возбуждения
Отложим на рис. 22, а значение этой скорости в виде отрезка ОС.
Выполним второе правило, примем ω = 0 подставим это значение в уравнение
характеристики
0 = - ,
откуда ток якоря
I = ( 12 )
Это найденное при ω = 0 значение тока якоря называется током короткого замыка
ния и обозначается I . Окончательно:
I = ( 13 )
Отложим на рис. 3.2, а значение этого тока в виде отрезка ОА.
Проведя через точки А и С прямую, получим график электромеханической характе-
ристики ω ( I ).
Точкам А и С соответствуют граничные режимы работы двигателя, а именно:
точке А – режим короткого замыкания, точке С – режим идеального холостого хода.
Под режимом короткого замыкания ( стоянка двигателя под током ) понимают ре-
жим, наступающий при включении двигателя на напряжение сети при заторможенном
якоре. Также в таком режиме находятся все двигатели в первый момент каждого пуска,
когда якорь неподвижен ( ω = 0 ).
Под режимом идеального холостого хода понимают режим, наступающий в случае,
если якорь двигателя сторонними, например, механическими силами разогнать до такой скорости, при которой противоЭДС обмотки якоря Е = сωФ станет равной напряжению питающей сети ( Е = U ).
В этом случае полученный из уравнения ( 1 )
U = Е + I R
ток якоря
I = = = 0 ( 14 )
Особенность этого режима состоит в том, что двигатель, будучи включен в сеть и
вращаясь со скоростью ω = ω , ток из сети не потребляет.
Физически это объясняется тем, что в обмотке якоря напряжение сети U уравнове-
шивается встречно направленной ему противоЭДС обмотки якоря Е, поэтому U – E = 0.
В судовых условиях такой режим может наступить, например, при спуске тяжелого
груза, когда по мере нарастания скорости спуска противоЭДС обмотки якоря Е = сωФ
непрерывно увеличиваясь, сравняется с напряжением питающей сети (U – E = 0 ).
Используя выражение ( 11 ), уравнение механической характеристики ( 7 ) можно
представить в таком виде:
ω = ω - Δω ( 15 ),
где Δω = - перепад скорости ( 16 )
Найдем из уравнения ( 15 ) перепад скорости в общем виде
Δω = ω - ω ( 17 ).
Из выражения ( 16 ) следует, что перепад скорости равен разности между скоро-
стью идеального холостого хода ω ( для данного двигателя – величина постоянная ) и
текущим значением скорости якоря, которое может изменяться от ω = 0 ( режим коротко-
го замыкания, пуск ) до ω = ω ( режим идеального холостого хода ).
При работе в номинальном режиме ( точки В на рис. 22, а и б ) перепад скорости
обозначен отрезком Δω .
Из выражения перепада
Δω =
следует, что перепад скорости тем больше, чем больше электромагнитный момент двигате
ля М и сопротивление обмотки якоря, и чем меньше магнитный поток Ф.
При идеальном холостом ходе ω = ω , поэтому перепад
Δω = ω - ω = ω - ω = 0.
В режиме короткого замыкания ( пуске ) ω = 0, поэтому перепад скорости
Δω = ω - 0 = ω .
Таким образом, на участке характеристики между точками А и С перепад может
изменяться от значения Δω = 0 ( идеальный холостой ход ) до Δω = ω ( при пуске двига-
теля ).
Пример 1.
Построить естественную механическую характеристику двигателя с параллельным
( независимым ) возбуждением по справочным данным:
1. полезная мощность Р = 40 кВт;
2. напряжение U = 440 В;
3. частота вращения n = 3000 об / мин;
4. коэффициент полезного действия η = 90,5%;
5. сопротивление обмотки якоря R = 0,071 Ом;
6. сопротивление обмотки добавочных полюсов R = 0,041 Ом;

 -
- 
 = 0 и подставим это значение в уравнение
= 0 и подставим это значение в уравнение =
=  . Окончательно:
. Окончательно: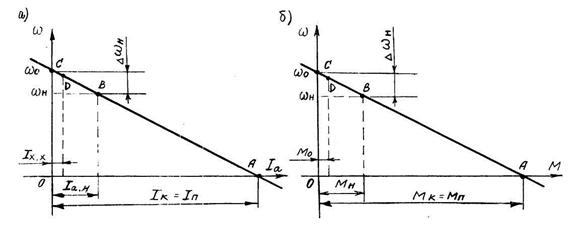
 ( 12 )
( 12 ) . Окончательно:
. Окончательно: =
=  = 0 ( 14 )
= 0 ( 14 ) - перепад скорости ( 16 )
- перепад скорости ( 16 ) .
. = 40 кВт;
= 40 кВт; = 440 В;
= 440 В; = 0,041 Ом;
= 0,041 Ом; = 96 Ом.
= 96 Ом.