Под электромеханическими свойствами электродвигателей понимают взаимосвязь между электрическими параметрами электродвигателей и параметрами механизмов, при-
водимых в движение при помощи электродвигателей.
Основным инструментом для описания электромеханических свойств электродвига
телей являются уравнения механических и электромеханических характеристик электро-
двигателей.
Уравнения естественных механической и электромеханческой характе-
Ристик электродвигателя постоянного тока параллельного ( независимого ) возбуж-
Дения
Электромеханические свойства двигателя с параллельным ( рис. 3.1, а ) и независи-
мым ( рис. 3.1, б ) возбуждением одинаковы, при условии, что у двигателя с независимым
возбуждением напряжение возбуждения U равно напряжению на якоре U ( U = U ),
и оба этих напряжения равны напряжению на зажимах двигателя с параллельным возбуж
дением.
Рис. 3.1. Схемы включения двигателя с параллельным ( а ) и независимым ( б ) возбуждением: U - напряжение на якоре двигателей; U - напряжение возбуждения
Эти свойства можно объяснить при помощи электромеханической и механической
характеристик.
При выводе этих уравнений в качестве исходного используется известное из курса электрических машин уравнение ЭДС обмотки якоря двигателя постоянного тока
U = Е + I R ( 1 ),
где U – напряжение на якоре ( щетках ) двигателя;
Е – противоэлектродвижущая сила ( противоЭДС ) обмотки якоря двигателя;
I R - падение напряжения на сопротивлении обмотки якоря.
Смысл уравнения такой: напряжение, подводимое из сети к обмотке якоря двигате-
ля, уравновешивается в обмотке противоЭДС и падением напряжения на якоре.
Подставим в ( 1 ) выражение ЭДС обмотки якоря
Е = k ωФ ( 2 ).,
где k – конструктивный коэффициент ( для данного двигателя величина постоян-
В правой части уравнения ( 4 ) все параметры, кроме тока якоря I - величины постоянные.
Значит, оно представляет собой уравнение естественной электромеханической характеристики ω (I ).
Чтобы перейти к уравнению механической характеристики, используем формулу
электромагнитного момента
М = k I Ф ( 5 ),
откуда ток якоря
I = ( 6 ).
Подставив ( 6 ) в ( 4 ) , получим
ω = - М . ( 7 )
В правой части этого уравнения все параметры, кроме электромагнитного момента двигателя М, т.е. U, k, Ф, R - величины постоянные.
Значит, оно представляет собой зависимость ω( М ), т.е уравнение естественной механической характеристики.
Физический смысл уравнений электромеханической ( 4 ) и механической ( 7 ) характеристик одинаков: при увеличении тока якоря ( электромагнитного момента ) скорость двигателя уменьшается.
Для установившегося режиме ( скорость постоянна ) справедливо уравнение момен-
тов
М = М = М + М ( 8 )
Подставим ( 8 ) в ( 7 )
ω = - ( М + М ) ( 9 ).
Если пренебречь малым по величине моментом холостого хода, т.е. принять М =
= 0, то в полученном уравнении ( 9 ) все параметры, кроме статического момента механиз
ма, т.е. U, k, Ф, R и М - величины постоянные.
Значит, оно представляет собой зависимость ω ( М ), что четко отражает физиче
ский смысл уравнения естественной механической характеристики, а именно:
единственной причиной изменения скорости двигателя ω является изменение полезного момента механизма М , причем чем больше этот момент, тем скорость двига
теля меньше, и наоборот.
Данный вывод справедлив только для случая, когда двигатель работает на есте-
ственной механической характеристике, т.е. при номинальном напряжении U и отсутст-
вии резисторов в цепи обмотки якоря или ( и ) независимой ( параллельной ) обмотки воз-
буждения.
На естественной механической характеристике работают двигатели вентиляторов, насосов и других приводов, в которых не предусмотрено регулирование скорости при по-
мощи схемы управления.
У таких нерегулируемых приводов управление сводится только к пуску и останов
ке электродвигателя.
Совершенно понятно, что в регулируемых электроприводах скорость двигателя из
меняется, но для этого применяют способы регулирования, связанные с изменением пара
метров питающей сети и самого двигателя, например, напряжения и частоты тока сети, сопротивления цепей обмоток статора ( якоря ) и ротора ( для асинхронных двигателей с фазным ротором ) и т.п.

 равно напряжению на якоре U
равно напряжению на якоре U  ( U
( U 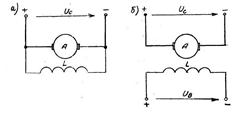
 R
R  -
-  ( 4 ).
( 4 ). ( 6 ).
( 6 ). . ( 7 )
. ( 7 ) = М
= М  + М
+ М  ( 8 )
( 8 ) + М
+ М  )
)  ( 9 ).
( 9 ).