Электропривод представляет собой электромеханическую систему, которая должна работать устойчиво.
Примером устойчивой системы является детская игрушка «Ванька-встанька».
Если «Ваньку» наклонить, а затем убрать руку, игрушка качнется несколько раз в разные стороны, а затем замрет, вернувшись в прежнее положение.
Точно так же работают устойчивые системы.
Рассмотрим устойчивость электропривода.
В общем случае под устойчивостью системы ( в данном случае – электропривода )
понимают ее способность вернуться к прежнему или близкому к прежнему состоянию по-
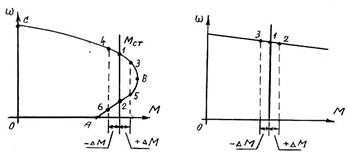
сле кратковременногодействия на нее внешнего возмущающего воздействия ( рис. 2.9 ).
. а ) б )
Рис. 2.9. Механические характеристики асинхронного двигателя ( а ) и двигателя параллельного возбуждения ( б )
В данном случае, под внешним возмущающим воздействием будем понимать изме-
нение исходного статического момента М на величину + Δ М или - Δ М.
Рассмотрим устойчивость работы привода в двух случаях:
1. в исходном состоянии двигатель работает в точке 1 на участке ВС своей механи-
ческой характеристики;
2. в исходном состоянии двигатель работает в точке 2 на участке АВ.
Для упрощения объяснения механическую характеристику механизма изобразим в виде вертикальной прямой М .
В первом случае асинхронный двигатель работает в точке 1 в установившемся ре-
жиме.
Для этой точки справедливо равенство моментов двигателя М = М .
Если кратковременно увеличить статический момент на величину + Δ М, до значе
ния М' = М + Δ М, двигатель за счет саморегулирования перейдет из точки 1 в точку 3.
В этой точке наступит установившийся режим, т.к. момент двигателя увеличился до значения, равного возросшему моменту механизма.
Если скачкообразно убрать внешнее воздействие, т.е. статический момент механиз-
ма уменьшить до прежнего значения М , то электромагнитный момент двигателя в пер-
вый момент времени не изменится.
Последнее объясняется тем, что из-за инерции якоря его скорость не может изме-
ниться мгновенно, т.е. в первый момент останется такой, как в точке 3.
Поэтому ( см. логическую цепочку выше ) противоэлектродвижущая сила обмотки якоря, а значит, ток якоря и электромагнитный момент двигателя останутся прежними, как в точке 3.
Значит, электромагнитный момент двигателя в точке 3 окажется больше статиче-
ского момента механизма ( точка 1 ), поэтому двигатель станет разгоняться по участку
3 -1 своей механической характеристики, возвращаясь из точки 3 в точку 1.
На этом участке скорость двигателя увеличивается, а момент уменьшается.
Как только двигатель, уменьшая свой момент, вернется в точку 1, переходный про-
цесс закончится, т.к. в этой точке вновь наступит равновесие двух моментов – двигателя и механизма ( М = М ).
Наоборот, при уменьшении исходного статического момента на величину - Δ М электродвигатель автоматически, за счет саморегулирования, также уменьшит свой элект-
ромагнитный момент и перейдет из точки 1 в точку 4.
В этой точке наступит равновесие моментов двигателя и механизма ( М' = М' ).
Если скачкообразно убрать внешнее воздействие, т.е. статический момент механиз-
ма увеличить до прежнего значения М , то электромагнитный момент двигателя в пер-
вый момент времени не изменится из-за инерции якоря ( см. саморегулирование ).
В результате этот момент ( точка 4 ) станет меньше тормозного статического ( точ-
ка 1 ), и двигатель станет тормозиться по участку 4 – 1 своей механической характеристи-
ки.
На этом участке момент двигателя увеличивается, и в точке 1 вновь наступит уста-
новившийся режим.
Таким образом, в любой точке отрезка ВС механической характеристики двигателя последний работает устойчиво.
Во втором случае асинхронный двигатель работает в точке 2 в установившемся ре-
жиме.
Для этой точки справедливо равенство моментов двигателя М = М .
Если кратковременно увеличить статический момент на величину + Δ М, до значе-
ния М' = М + Δ М, двигатель за счет саморегулирования перейдет из точки 1 в точку 5.
В этой точке наступит установившийся режим, т.к. момент двигателя увеличился до значения, равного возросшему моменту механизма.
Если скачкообразно убрать внешнее воздействие, т.е. статический момент механиз-
ма уменьшить до прежнего значения М , то электромагнитный момент двигателя М в первый момент времени не изменится, и он окажется больше тормозного статического.
Поэтому в последующие моменты времени двигатель станет разгоняться по участ-
ку 5- В -1 и в точке 1 вновь наступит равновесие моментов двигателя и механизма.
Таким образом, в рассмотренном случае двигатель не вернулся в точку 2 исходного режима, а перешел работать в точку 1 с повышенной против точки 2 скоростью.
Если же, начиная с точки 2, кратковременно уменьшить статический момент М
на величину - Δ М, двигатель перейдет за счет саморегулирования из точки 2 в точку 6, в которой наступит установившийся режим.
Если скачкообразно убрать внешнее воздействие, т.е. статический момент механиз-
ма увеличить до прежнего значения М , то электромагнитный момент двигателя М в пер
вый момент времени не изменится, и он окажется меньше тормозного статического.
Поэтому в последующие моменты времени двигатель станет тормозиться по участ-
ку 6 – А, и в точке А остановится и перейдет в режим стоянки под током.
Таким образом, и в этом случае двигатель не вернулся в точку 2 исходного режима,
а перешел в точку А с пониженной против точки 2 скоростью, равной нулю.
Таким образом, в любой точке отрезка АВ механической характеристики двигателя последний работает неустойчиво.
На участке ВС ( устойчивая работа ) жесткость механической характеристики
β = < 0,
т.е. при увеличении момента М ( ΔМ > 0 ), например, при переходе из точки 1 в точку 3, скорость уменьшается ( Δω < 0 ), и наоборот.
На участке АВ ( неустойчивая работа ) жесткость механической характеристики
β = > 0,
т.е. при увеличении момента М ( ΔМ > 0 ), например, при переходе из точки 2 в точку 5 скорость также увеличивается ( Δω > 0 ), и наоборот.
Таким образом, двигатель работает устойчиво на участке механической характери-
стики, где жесткость отрицательна ( β < 0 ) и неустойчиво на участке, где жесткость положительна ( β > 0 ).
Более подробно устойчивость работы асинхронного двигателя рассматривается ниже ( см. §*** «Опрокидывание асинхронного двигателя» ).
Сравним устойчивость асинхронного двигателя и двигателя постоянного тока с па-
раллельным возбуждением ( рис. 2.9, б ).
Рассуждая аналогично, можно показать, что при увеличении статического момента
на величину + ΔМ двигатель постоянного тока перейдет из исходной точки 1 в точку 2, в которой наступит установившийся режим.
Если скачкообразно убрать внешнее воздействие, т.е. статический момент механиз-
ма уменьшить до прежнего значения М , то электромагнитный момент двигателя М в первый момент времени окажется больше статического.
Поэтому в последующие моменты времени двигатель станет разгоняться по участ-
ку 2 – 1, и в точке 1 переходный процесс закончится.
В этой точке вновь наступит установившийся режим.
Наоборот, при уменьшении статического момента на величину – ΔМ двигатель пе-
рейдет из исходной точки 1 в точку 3, в которой наступит установившийся режим.
Если скачкообразно убрать внешнее воздействие, т.е. статический момент механиз-
ма увеличить до прежнего значения М , то электромагнитный момент двигателя М в пер
вый момент времени не изменится, и он окажется меньше тормозного статического.
Двигатель станет тормозиться по участку 3 – 1 своей механической характеристи-
ки.
На этом участке момент двигателя увеличивается.
В точке 1 вновь наступит установившийся режим.
Таким образом, двигатель с параллельным возбуждением работает устойчиво в лю
бой точке своей механической характеристики до момента остановки якоря.
При остановке якоря двигатель перейдет в режим короткого замыкания ( режим стоянки под током ). Этому режиму соответствует точка пересечения механической харак-
теристики электродвигателя с положительной полуосью оси моментов М.
Если, начиная с этой точки, увеличить активный статический момент ( в элекропри
водах ГПМ или ЯШУ увеличением веса груза или якоря с якорь-цепью, двигатель реверси
рует и станет увеличивать свой электромагнитный момент до те пор, пока последний не
сравняется с возросшим статическим моментом механизма. При наступлении равенства этих двух моментов вновь наступит установившийся режим тормозного спуска.

 на величину + Δ М или - Δ М.
на величину + Δ М или - Δ М. < 0,
< 0,