Если для любого электродвигателя входной величиной является момент механизма, а выходной – его скорость, то для механизмов, наоборот, входной величиной является ско
рость ω ( от двигателя ), а выходной – статический момент механизма М . Это означает, что при любом изменении скорости механизма ( двигателя ) будет изменяться его статиче-
ский момент М .
Например, в электроприводе центробежного насоса при увеличении скорости ω
момент на крыльчатке М увеличивается пропорционально скорости.
Зависимость статического момента механизма М от его угловой скорости ω назы
вается механической характеристикой механизма - М ( ω ).
Таким образом, система координат для изображения механических характеристик
механизмов – это М ( ω ).
. Различают два вида механических характеристик:
1. крановые, когда при изменении скорости в широких пределах статический мо
мент не изменяется ( рис. 19, характеристика 1 ).
Такая характеристика описывается уравнением
М = сonst ,
т.е. момент не зависит от скорости.
2. вентиляторные, у которых статический момент пропорционален квадрату скоро
сти ( рис. 19, характеристика 2 ).
Такая характеристика описывается уравнением
М = М + ΔМ,
где М - момент холостого хода;
ΔМ = сω - момент, создаваемый рабочим органом механизма при выполнении полезной работы ( с – постоянный коэффициент, ω – угловая скорость вала механизма ).
Рис. 2.6. Механические характеристики механизмов: а – в системе координат
М ( ω ); б - в системе координат ω (М)
Крановые характеристики имеют механизмы грузовых кранов, лебедок, брашпи-
лей, т.е. механизмов, работа которых связана с преодолением действия силы тяжести.
Статический момент таких механизмов
М = GD/2 = const,
где G – вес груза ( у брашпилей – весом якоря с якорь-цепью );
D – диаметр грузового ( у брашпилей – якорного ) барабана.
Вентиляторные характеристики имеют центробежные вентиляторы, насосы и др.
У таких механизмов условия пуска – легкие, т.к. при пуске на валу механизма есть небольшой момент холостого хода М , создаваемый силами трения в элементах привода.
Однако по мере разгона статический момент механизма резко увеличивается за счет того, что к моменту холостого хода добавляется момент ΔМ = сω , создаваемый си
лами трения рабочего органа ( крыльчатки ) о среду ( у вентиляторов – воздух, у насосов – перекачиваеая жидкость ).
Таким образом, для изображения механических характеристик двигателей применя
ют систему координат ω (М), механических характеристик механизмов – «перевернутую» систему М ( ω ).
Применение разных систем координат для двигателей и механизмов создает трудно
сти при рассмотрении электромеханических свойств электропривода в целом, состоящего из электродвигателя и механизма.
Поэтому на практике для изображения механических характеристик двигателей и механизмов принята единая система координат ω (М), т.е система, принятая для механи-
ческих характеристик электродвигателей.
В этой системе координат механические характеристики механизмов показаны на рис. 2.6, б.
§ 2.3. Механические характеристики двигателей и механизмов в 4-х квадран-
Тах
В принятой системе координат ω (М) механические характеристики электродвигате
лей и механизмов могут располагаться в любом из 4-х квадрантов, в зависимости от режи-
ма работы электропривода.
Выясним, какому режиму работы электропривода соответствует каждый квадрант.
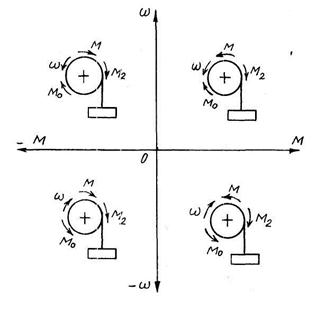
Рис. 2.7. Режимы работы электропривода
Объясним эти режимы на примере электропривода грузовой лебёдки.
Для этого вначале изобразим в каждом квадранте барабан лебёдки с висящим
грузом ( рис. 2.7 ).
Затем рассмотрим взаимодействие моментов, приложенных к валу двигателя, в
каждом из четырёх квадрантов.
Начнём с первого квадранта.
В теории электропривода принято считать, что в 1-м квадранте двигатель работает
в режиме подъёма.
Чтобы обеспечить подъём груза, барабан должен вращаться в направлении против
часовой стрелки ( 1-й квадрант ). Поэтому нарисуем рядом с барабаном стрелку «ω» в упо
мянутом направлении.
Вращает барабан в этом направлении электродвигатель, поэтому направление его
электромагнитного момента М совпадает с направлением угловой скорости «ω».
Кроме электромагнитного момента М, к валу двигателя приложены ещё два:
1. полезный момент М , созданный грузом. Поскольку сила тяжести всегда направле
на вниз ( к центру Земли ), этот момент на рис. 1, б направлен по часовой стрелке, навстре
чу направлению вращения барабана. Поэтому момент М - тормозной;
2. момент холостого хода М , созданный силами трения. Силы трения всегда препят-
ствуют движению, поэтому этот момент направлен навстречу «ω». Этот момент – тормоз-
ной.
Итак, в 1-м квадранте двигатель работает в режиме подъёма, причём движущим
( вращающим ) является электромагнитный момент двигателя М, а тормозными – полез-
ный момент М груза и момент холостого хода М сил трения.
В прямоугольной системе координат при последовательном переходе из одного
квадранта в другой изменяется знак только одной координаты, скорости «ω» или элект-
ромагнитного момента двигателя «М».
Поэтому при переходе из 1-го квадранта во 2-й изменяется знак только электромаг
нитного момента М.
Значит, во 2-м квадранте на барабане лебёдки надо изменить на противоположное
тольконаправление электромагнитного момента М.
Во 2-м квадранте этот момент оказался направленным навстречу движению ( навст
речу «ω» ), значит, он тормозной.
Поскольку в системе координат знак «ω» не изменился, значит, двигатель продол-
жает вращаться в направлении на подъём ( по инерции ), но к его валу уже приложен тор
мозной момент двигателя М.
Поэтому режим работы двигателя называется «торможение при подъёме».
Такой режим можно получить, если на ходу переключить двигатель из направления
«подъём» в направление «спуск». ( на ходу начать реверсировать ).
При переходе из 2-го квадранта в 3-й изменяется знак только направления враще-
ния «ω».
Поскольку изменилось направление вращения, изменяется на обратное направле-
ние момента холостого хода М . Направление действия моментов М и М не изменяет-
ся.
В 3-м квадранте направления вращения «ω» и момента двигателя М направлены
согласно, значит, этот момент – движущий.
В 3-м квадранте двигатель работает на спуск груза, причём электромагнитный мо-
мент двигателя М направлен в направлении на спуск, т.е. заставляет груз опускаться при
нудительно, при помощи своего электромагнитного момента ( электромагнитной силы ).
Поэтому режим работы двигателя в 3-м квадранте называют «силовой спуск».
Его применяют, например, в электроприводах брашпилей с самотормозящейся чер-
вячной передачей. У таких электроприводов при растормаживании якорь не может опу-
ститься под действием собственного веса, из-за трения в передаче. Поэтому двигатель
включают на спуск, опуская якорь силой.
При переходе из 3-го квадранта в 4-й изменяется знак только электромагнитного
момента двигателя М. Этот момент теперь направлен на подъём, хотя происходит спуск
груза. Значит, он – тормозной. Иначе говоря, двигатель притормаживает электропривод,
ограничивает скорость спуска груза, не даёт грузу разогнаться.
Поэтому режим работы двигателя в 4-м квадранте называют «тормозной спуск».
Выводы:
1. в определённый момент времени двигатель может работать в одном из 4-х режимов:
а ) подъём; б ) торможение при подъёме; в ) силовой спуск; г ) тормозной спуск;
2. в 1-м и 3-м квадрантах ( нечётных ) двигатель работает в двигательном режиме,
когда направление электромагнитного момента М совпадает с направлением вращения;
во 2-м и 4-м квадрантах - в тормозном, его направление противоположно вращению.

 . Это означает, что при любом изменении скорости механизма ( двигателя ) будет изменяться его статиче-
. Это означает, что при любом изменении скорости механизма ( двигателя ) будет изменяться его статиче- + ΔМ,
+ ΔМ, - момент, создаваемый рабочим органом механизма при выполнении полезной работы ( с – постоянный коэффициент, ω – угловая скорость вала механизма ).
- момент, создаваемый рабочим органом механизма при выполнении полезной работы ( с – постоянный коэффициент, ω – угловая скорость вала механизма ).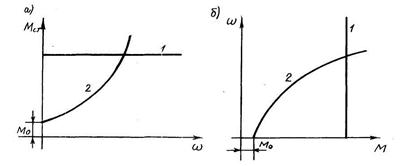
 , созданный грузом. Поскольку сила тяжести всегда направле
, созданный грузом. Поскольку сила тяжести всегда направле , созданный силами трения. Силы трения всегда препят-
, созданный силами трения. Силы трения всегда препят- не изменяет-
не изменяет-