Рассмотрим естественные механические характеристики двигателей разных типов
без их вывода и анализа.
Естественная механическая характеристика синхронного двигателя
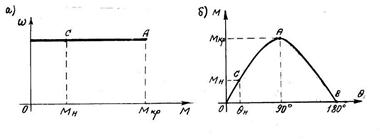
Рис. 2.1. Естественная механическая ( а ) и угловая ( б ) характеристики
синхронного двигателя; θ – угол отставания оси ротора от оси магнитного
поля обмотки статора
Естественная механическая характеристика синхронного двигателя ( рис. 14, а ) – абсолютно жесткая, потому что ее жесткость
β = ΔМ / Δω = ΔМ / 0 = ∞.
Иначе говоря, при изменении электромагнитного момента М двигателя в широких пределах скорость двигателя не изменяется.
Cтабильность скорости ротора синхронного двигателя объясняется при помощи угловой характеристики синхронного двигателя θ ( М ) следующим образом ( рис.14, б ).
Если механическая нагрузка к ротору не приложена, то оси ротора и вращающегося магнитного поля обмотки статора совпадают, т.е. θ = 0° ( точка 0 на рис. 14, б ). Электромагнитный момент двигателя М = 0, двигатель работает в режиме холостого хода.
Если приложить к валу двигателя механическую нагрузку и увеличивать ее, то ро-
тор под действием механической нагрузки станет отставать от магнитного поля обмотки статора на все больший угол θ. Чем больше механическая нагрузка на валу, тем больше этот угол и тем больше вращающий электромагнитный момент двигателя.
Такое одновременное увеличение вращающего момента двигателя, вызываемое уве
личением тормозного момента механизма как раз и обеспечивает стабильность скорости двигателя ( на рис. 14, а участок характеристики от М = 0 до М = М ).
Однако постоянство скорости двигателя сохраняется до тех пор, пока угол θ≤90°.
При θ = 90° двигатель развивает критический ( максимальный ) момент М ( точка А на рис. 14, а ).
Если при θ = 90° вновь увеличить механическую нагрузку ( θ > 90° ), электромаг-
нитный момент двигателя станет уменьшаться ( отрезок АВ угловой характеристики ), т.е
этот момент окажется меньше тормозного момента механизма. В результате скорость рото
ра двигателя станет уменьшаться, и в конце концов ротор остановится.
Поскольку при этом скорость ротора меньше скорости вращающегося магнитного поля обмотки статора, говорят, что двигатель выпал из синхронизма.
Как следует из угловой характеристики двигателя, условие выпадения двигателя из синхронизма такое: : θ≤90°.
На практике номинальный угол θ = 20…40°.
Область применения синхронных двигателей: на судах – в качестве гребных элект-
родвигателей, вращающих винты; на берегу – для привода мощных механизмов, напри-
мер, компрессоров на газоперекачивающих станциях.
Естественная механическая характеристика двигателя постоянного тока паралельного ( независимого ) возбуждения
Рис. 2.2. Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
Естественная механическая характеристика двигателя постоянного тока паралель-
ного возбуждения ( рис. 15, а ) – жесткая, потому что ее жесткость
β = ΔМ / Δω ≤ 10%.
Это означает, что при изменении электромагнитного момента двигателя в широких пределах его скорость достаточна стабильна ( т.е. изменяется незначительно ).
Естественная механическая характеристика двигателя постоянного тока независимого возбуждения имеет такой же вид ( рис. 2.2 ).
Такие двигатели применяются там, где при изменении нагрузки механизма в широ-
ких пределах скорость двигателя не должна изменяться резко - в электроприводах насо-
сов, вентиляторов и т.п.
Естественная механическая характеристика двигателя постоянного тока независи-
мого возбуждения имеет такой же вид ( рис. 2.2 ).
Эти двигатели применяют в электроприводах мощных механизмов – тяжеловесных лебедках и кранах, якорно-швартовных устройствах и гребных электрических установках.
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
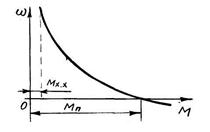
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения зображена на рис. 2.3.
Эта характеристика - мягкая, потому что ее жесткость
β = ΔМ / Δω > 10%.
Это означает, что при изменении электромагнитного момента двигателя даже в не-
больших пределах его скорость изменяется значительно.
Рис. 2.3. Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
Напомним две характерные особенности этого двигателя:
при уменьшении механической нагрузки на валу или ее отсутствии ( М = М )
скорость двигателя резко увеличивается, двигатель «идет вразнос». Поэтому этот двига-
тель нельзя оставлять без нагрузки на валу;
При пуске двигатель развивает пусковые моменты М гораздо большие, чем у дви-
гателей других типов.
Эти двигатели не применяются на судах, но применяются на берегу, например, в электротранспорте, в частности, в троллейбусах, где они не остаются без нагрузки на валу и где нужны большие пусковые моменты ( при трогании троллейбуса с места ).
Естественные механическиея характеристики двигателей постоянного тока смешанного возбуждения
Рис. 2.4. Естественные механическиея характеристики двигателей постоянного тока смешанного возбуждения: 1- с параллельно-последовательным возбуждением;
2 - с последовательно- параллельным возбуждением
Естественная механическая характеристика двигателя постоянного тока смешанно-
го возбуждения является промежуточной между характеристиками двигателей паралель-
ного и последовательного возбуждения, т.к. магнитный поток возбуждения создается сов-
местным действием обеих обмоток – параллельной и последовательной.
Потому она не такая жесткая как у двигателей паралельного возбуждения, и не такая мягкая как у двигателей последовательного возбуждения.
Различают два вида двигателей смешанного возбуждения:
1. с параллельно-последовательным возбуждением, у которых основную часть ре-
зультирующего магнитного потока создает параллельная обмотка ( до 70%, остальные 30% - последовательная );
2. с последовательно- параллельным возбуждением, у которых основную часть ре-
зультирующего магнитного потока создает последовательная обмотка ( до 70%, остальные 30% - параллельная ).
Поэтому график механической характеристики двигателя первого вида более жест-кий, чем у двигателя второго вида.
Обе механические характеристики - мягкие, потому что их жесткость
β = ΔМ / Δω > 10%.
На судах двигатели смешанного возбуждения применяются в регулируемых элект-
роприводах – лебедках, кранах, брашпилях и шпилях.
Естественная механическая характеристика асинхронного двигателя с коротко-
замкнутым ротором
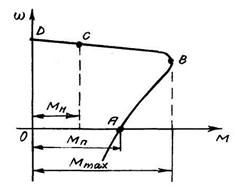
Естественная механическая характеристика асинхронного короткозамкнутого двигателя имеет два участка – нерабочий ( разгонный ) АВ и рабочий ВСD ( рис. 2.5 ).
Рис. 2.5. Естественная механическая характеристика асинхронного двигателя
При пуске двигатель развивает пусковой момент М ( отрезок ОА ), после чего раз
гоняется по траектории АВС до точки С. При этом на участке АВ одновременно увеличи-
ваются как скорость, так и момент.
В точке В двигатель развивает максимальный момент М .
На участке ВС скорость продолжает увеличиваться, а момент уменьшается, вплоть до номинального ( точка С ).
На этом участке двигатель перегружен, т.к. в любой точке этого участка электромаг
нитный момент двигателя больше номинального ( М > М ).
В нормальних условиях двигатель работает на участке СD, жесткость которого
β = ΔМ / Δω < 10%.
Это означает, что при изменении момента в широких пределах скорость двигателя изменяется незначительно.
Асинхронные двигатели нашли самое широкое применение на судах с электростан-

 ).
). = 20…40°.
= 20…40°.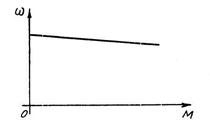
 )
) гораздо большие, чем у дви-
гораздо большие, чем у дви-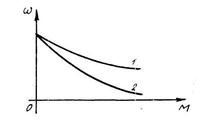
 .
.