Деление механических характеристик электродвигателей по функциям
Двигатели в электроприводе по функциям и назначениям можно разделить на следующие три группы:
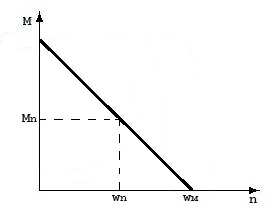
1. С линейной механической характеристикой.
Т.е. если от двигателя требуется выполнение некоторого перемещения, как например в исполнительных двигателях автоматических устройств , то наиболее подходящей для них является линейная механическая характеристика, вида
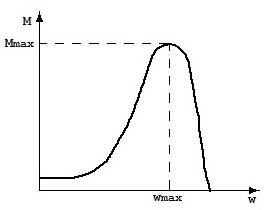
2. Двигатели, предназначенные для совершения работы в электроприводах могут иметь характеристику, при которой наибольший момент развивается приблизительно около точки по скорости близкой к максимальному значению ωmax .
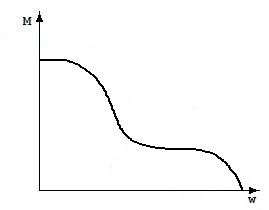
3. Двигатели, предназначенные для подъёма транспортных установок, они должны развивать наибольший момент при пуске и иметь наибольший КПД при одной или двух выбранных скоростях.
Переходной процесс (далее п/п) представляет собой явление в механических, электрических и других системах, возникающее в результате резких изменений внутри системы или внешних воздействий на неё.
Для обозначения этих явлений в практике применяется различная терминология, имеющая одно и то же значение, также как неустановившийся или нестационарный процесс, неустановившийся или переходной режим.
Переходной процесс заключается в переходе от одного установившегося или равновесного состояния системы к другому её установившемуся состоянию.
К таким состояниям относятся пуск, торможение, реверсирование, изменение нагрузки и т.д.
В связи с этим можно отметить три группы электроприводов:
1. Приводы в которых переходные процессы не имеют места или возникают крайне редко(редко пускаемые в ход установки длительного режима работы, например электропривод центробежных насосов)
2. Приводы, с частыми или преобладающими переходными процессами (электроприводы с частыми пусками или реверсами).
3. Приводы с практически непрерывными переходными процессами (приводы ткацких станков).
Характер протекания и продолжительность переходного процесса определяются как его видом, так и особенностями самой системы, в которой они возникают, количеством и природой содержащихся в ней инерционностей, которые характеризуются так называемыми постоянными времени.
Различают следующие типы постоянных времени:
1. Электромеханическая
2. Электромагнитная
3. Тепловая
Названия соответствуют видам представленных ими инерций.
В течение переходного процесса могут изменяться : скорость вращения валов, ускорение, токи в цепях, напряжения и т.д.
Важным условием является устойчивость протекания переходного процесса, т.е. чтобы к концу переходного процесса система приходила к новому состоянию равновесия.
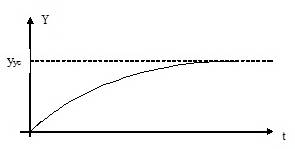
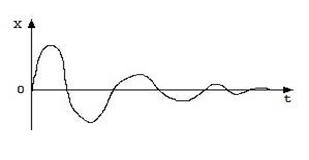
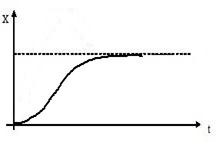
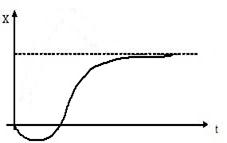
Характеристики устойчивых переходных процессов могут иметь либо экспоненциальную форму кривой закона перехода системы из одного состояния в другое, либо форму затухающих периодических колебаний.
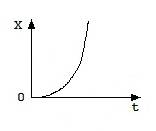
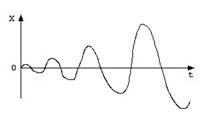
Неустойчивые переходные процессы характеризуются законами изменения переменной величины по расходящимся кривым.
Переходные процессы в системах обычно описываются ДУ.
Расчет переходного процесса по линейным ДУ может быть осуществлён аналитически и наиболее приемлем.
Для расчета сложных переходных процессов может быть применён принцип суперпозиции, т.е. общий переходной процесс в системе может быть представлен отдельным переходным процессом от каждого воздействия на систему.
Переходной процесс может рассчитываться, начиная с любого момента времени, принятого за начальный, если известны начальные энергетические условия системы в этот момент.
Основной характеристикой линейной системы в отношении п/п является так называемая переходная функция, которая описывает процессы в системе при воздействии на её входе единичного скачка входной величины от 0 до некоторого значения, принимаемого за 1.
Зная переходную функцию можно рассчитать п.п. в системе при произвольных внешних воздействиях.
Удобным аппаратом расчета п.п. является операционное исчисление.
Продолжительность устойчивого п.п. составляет 4-5 единицы постоянных времени системы.
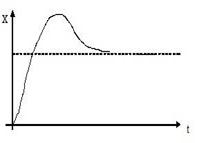
Важное значение в п/п имеет величина перерегулирования или величина превышения параметра регулирования над его установившимся значением в течении п.п.
Порядок ДУ, описывающего п/п, равен числу инерционных звеньев или постоянных времени звеньев, входящих в систему.
Между переходными процессами в электроприводах с двигателями постоянного тока и двигателями переменного тока существуют некоторые различия:
- У асинхронных двигателей в подавляющем большинстве электромагнитный п/п затухает быстрее по сравнению с электромеханическим, поэтому для таких систем достаточно рассмотреть только последний.
- Процесс описывается одним ДУ движения или механического равновесия системы
- У двигателей постоянного тока рассматриваются оба процесса: электромагнитный процесс и электромеханический, поэтому необходимо 2 уравнения равновесия: механического и электрического.
Результатом решения задачи переходного процесса могут быть зависимости в виде аналитических функций или кривых n=f(t), M=f(t), I=f(t).