2. Свободные колебания. Незатухающие и затухающие колебания.
3. Вынужденные колебания. Резонанс.
4. Сопоставление колебательных процессов. Энергия незатухающих гармонических колебаний.
5. Автоколебания.
6. Колебания тела человека и их регистрация.
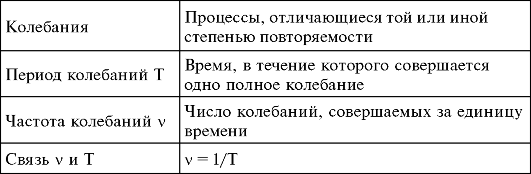
Колебаниями называют процессы, отличающиеся той или иной степенью повторяемости.
Повторяющиеся процессы непрерывно происходят внутри любого живого организма, например: сокращения сердца, работа легких; мы дрожим, когда нам холодно;
мы слышим и разговариваем благодаря колебаниям барабанных перепонок и голосовых связок;
при ходьбе наши ноги совершают колебательные движения.
Колеблются атомы, из которых мы состоим. Мир, в котором мы живем, удивительно склонен к колебаниям.
Периодическими называют такие колебания, при которых все характеристики движения повторяются через определенный промежуток времени.
Для периодических колебаний используют следующие характеристики:
• период колебаний Т, равный времени, в течение которого совершается одно полное колебание;
• частота колебаний ν, равная числу колебаний, совершаемых за одну секунду (ν = 1/Т);
• амплитуда колебаний А, равная максимальному смещению от положения равновесия
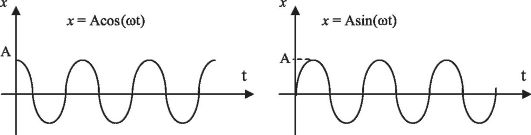
Гармонические колебания - это колебания, при которых наблюдаемая величина изменяется во времени по закону синуса или косинуса:
Положение тела, совершающего колебательное движение,характеризуется смещением относительно равновесного положения. В этом случае величины, входящие в формулу (1.1), имеют следующий смысл:
х - смещение тела в момент времени t;
А - амплитуда колебаний, равная максимальному смещению;
ω - круговая частота колебаний (число колебаний, совершаемых за 2π секунд), связанная с частотой колебаний соотношением
Рис. 1.1. Графики зависимости смещения от времени для х(0) = А и х(0) = 0
Свободными или собственными называются такие колебания, которые происходят в системе, предоставленной самой себе, после того как она была выведена из положения равновесия.
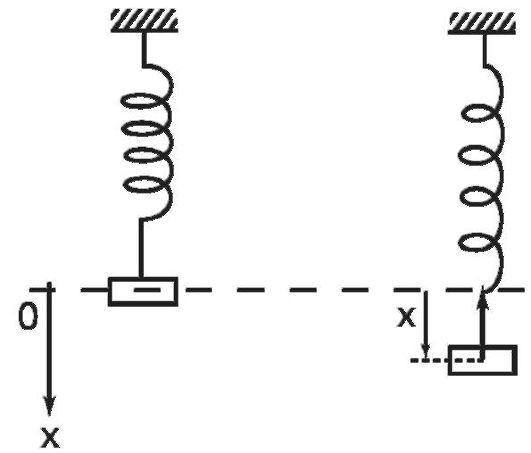
В качестве примера рассмотрим колебания тела, подвешенного на невесомой пружине, возникающие после того, как тело отклонили вниз, а затем отпустили (рис. 1.2).
Рис. 1.2. Колебания тела на пружине.
Со стороны растянутой пружины на тело действует упругая сила F, пропорциональная величине смещения х:
Постоянный множитель k называется жесткостью пружины.
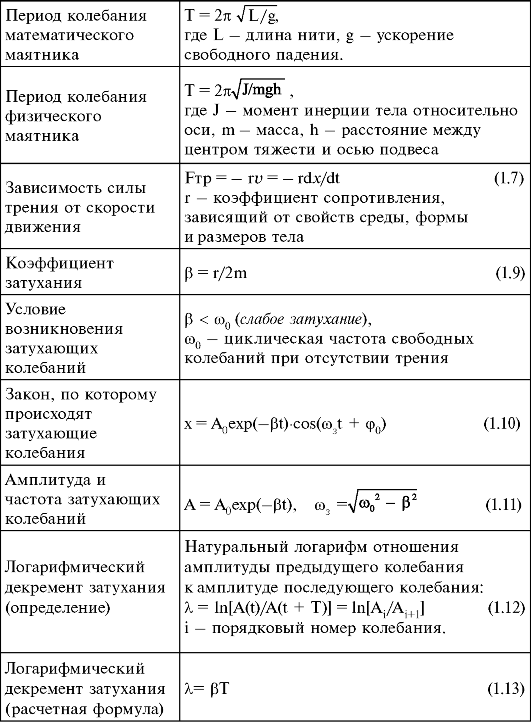
Математический маятник - небольшое тело (материальная точка), подвешенное на невесомой нити (рис. 1.3 а). Если нить отклонить от положения равновесия на небольшой (до 5°) угол α и отпустить, то тело будет совершать колебания с периодом, определяемым по формуле
где L - длина нити, g - ускорение свободного падения.
Физический маятник - твердое тело, совершающее колебания под действием силы тяжести вокруг неподвижной горизонтальной оси.
Период колебаний физического маятника описывается формулой
где J - момент инерции тела относительно оси, m - масса, h - расстояние между центром тяжести (точка С) и осью подвеса (точка О).
Силы трения, действующие в реальных системах, существенно изменяют характер движения: энергия колебательной системы постоянно убывает, и колебания либо затухают, либо вообще не возникают.
В качестве характеристики степени затухания используют безразмерную величину, называемую логарифмическим декрементом затухания λ.
Рис. 1.4. Зависимость смещения от времени при затухающих колебаниях
Логарифмический декремент затухания равен натуральному логарифму отношения амплитуды предыдущего колебания к амплитуде последующего колебания.
логарифмический декремент затухания находится по формуле:
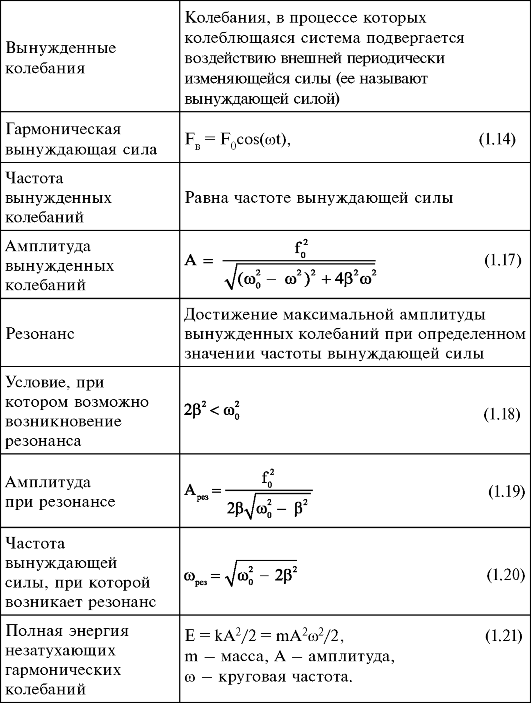
Вынужденными называются такие колебания, в процессе которых колеблющаяся система подвергается воздействию внешней периодической силы (ее называют вынуждающей силой).
Рис. 1.6. График зависимости смещения от времени при вынужденных колебаниях
Резонансом называется достижение максимальной амплитуды вынужденных колебаний при определенном значении частоты вынуждающей силы
В некоторых случаях сильное возрастание амплитуды колебаний при резонансе является опасным для прочности системы. Известны случаи, когда резонанс приводил к разрушению конструкций.
Рис. 1.7. Резонансные кривые
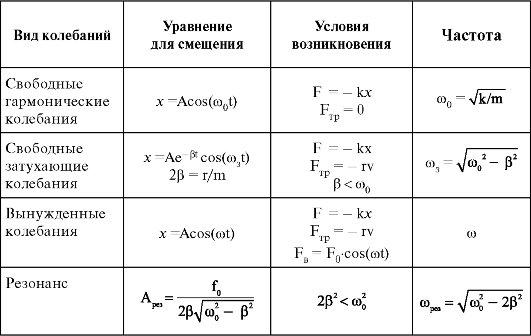
Таблица 1.1. Характеристики свободных и вынужденных колебаний
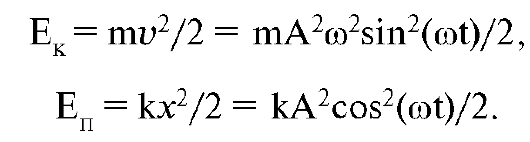
Тело, совершающее гармонические колебания, обладает двумя видами энергии: ---кинетической энергией движения Ек = mv2/2 и потенциальной энергией Еп, связанной с действием упругой силы.
Полная энергия системы, в которой происходят незатухающие гармонические колебания, складывается из этих энергий и остается неизменной:
Здесь m - масса тела, ω и A - круговая частота и амплитуда колебаний, k - коэффициент упругости.
Автоколебания - незатухающие колебания, поддерживаемые внешним источником энергии, поступление которой регулируется самой колебательной системой.
Системы, в которых возникают такие колебания, называются автоколебательными.
Амплитуда и частота автоколебаний зависят от свойств самой автоколебательной системы. Автоколебательную систему можно представить следующей схемой:
В данном случае сама колебательная система является каналом обратной связи воздействует на регулятор энергии, информируя его о состоянии системы.
Обратной связью называется воздействие результатов какого-либо процесса на его протекание.
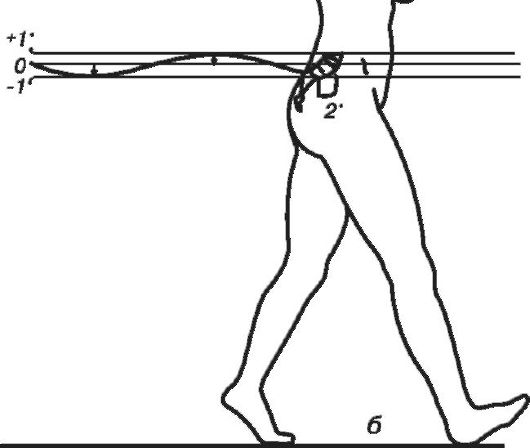
Колебательные движения тела человека при ходьбе
Ходьба - это сложный периодический локомоторный процесс, возникающий в результате координированной деятельности скелетных мышц туловища и конечностей.
Рис. 1.8. Вертикальное смещение ЦМ тела человека во время ходьбы.
Механические колебания сердца
Существуют различные методы исследования сердца, в основе которых лежат механические периодические процессы.
Баллистокардиография (БКГ) - метод исследования механических проявлений сердечной деятельности, основанный на регистрации пульсовых микроперемещений тела, обусловленных выбрасыванием толчком крови из желудочков сердца в крупные сосуды.
При этом возникает явление отдачи.
Тело человека помещают на специальную подвижную платформу, находящуюся на массивном неподвижном столе.
Платформа в результате отдачи приходит в сложное колебательное движение.
Зависимость смещения платформы с телом от времени называется баллистокардиограммой (рис. 1.9), анализ которой позволяет судить о движении крови и состоянии сердечной деятельности.
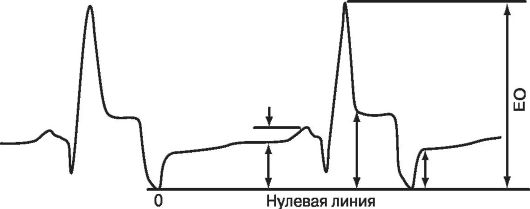
Апекскардиография (AKГ) - метод графической регистрации низкочастотных колебаний грудной клетки в области верхушечного толчка, вызванных работой сердца.
Регистрация апекскардиограммы производится, как правило, на многоканальном электрокардиографе



 Постоянный множитель k называется жесткостью пружины.
Постоянный множитель k называется жесткостью пружины. где L - длина нити, g - ускорение свободного падения.
где L - длина нити, g - ускорение свободного падения.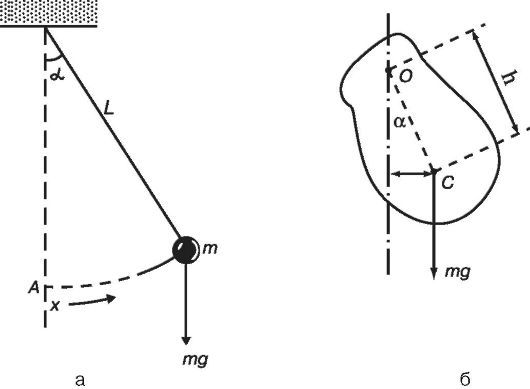
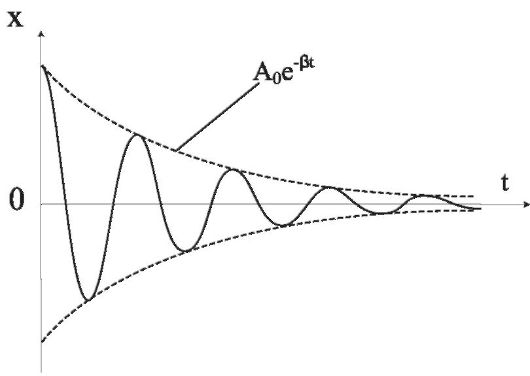


 Рис. 1.7. Резонансные кривые
Рис. 1.7. Резонансные кривые