Существует несколько основных вариантов преобразования двоичного RZ или ЛТ сигнала в линейный код:
1) без изменения тактовой частоты двоичного сигнала;
2) с увеличением .тактовой частоты;
3) с уменьшением тактовой частоты линейного сигнала.
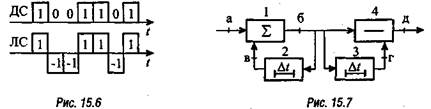
Первый вариант преобразования предполагает, что частота следования отдельных символов линейного кода не изменяется и равна исходной частоте следования ft отдельных символов ДС. Здесь возможны два способа преобразования. Первый способ— с активной паузой (рис. 15.6), при котором передача нулей в исходном видеосигнале заменяется на передачу посылок отрицательной полярности. Такой ЛС называется двоично-симметричным(ДСС). Поскольку в среднем число нулей и единиц в исходном сигнале одинаково, то постоянная составляющая преобразованного сигнала равна нулю, однако за счет возможности «скопления» нулей (или единиц) постоянная составляющая начинает изменяться во времени, и межсимвольные искажения второго рода не устраняются.
На практике часто применяют второй способ преобразования ДС, когда униполярный сигнал в коде RZ или NRZ преобразуется в квазитроичныйкод, или код ЧПИ (сигнал с чередованием полярности импульсов). При таком преобразовании «0» передается без изменения, а «1» передается так, что каждая следующая единица меняет свой знак на противоположный. Этот способ легко реализуем на практике, он устраняет межсимвольные искажения второго рода, не требуя расширения полосы пропускания в области верхних частот.
Одна из возможных структурных схем преобразования двоичного сигнала в квазитроичный приведена на рис. 15.7. Осциллограммы сигналов в контрольных точках представлены на рис. 15.8. Цифровой сигнал в двоичной форме (рис. 15.8, а) поступает на сумматор по модулю 2. На другой вход сумматора поступает сигнал, прошедший через линию задержки 1 и задержанный на один тактовый интервал (рис. 15.8, в). Выходной сигнал сумматора (рис. 15.8, 6) поступает на вычитающее устройство 4. Этот же сигнал, задержанный на тактовый интервал (рис. 15.8, г), поступает на Другой вход блока 4. На выходе вычитающего устройства получаем сигнал в квазитроичном коде
(рис.15.8,д).
Достоинством квазитроичного кода является то, что он не имеет постоянной составляю щей и легко преобразуется в исходный двоичный код путем его пропускания через безынерционный двухполупериодный выпрямитель.
Кроме того, он удобен тем, что в нем легко обнаруживаются ошибочные символы по признаку нарушения чередования полярности импульсов.
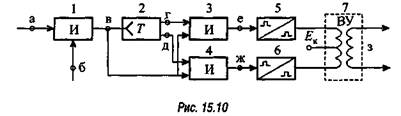
Схема преобразователя квазитроичного кода, изображенного на рис. 15.7, очень сложная. На входы логической ячейки И1 поступают входной цифровой сигнал (рис. 15.11,а) и стробирующие импульсы (рис. 15.11, б). Далее сигнал (рис. 15.11,в) поступает на вход триггера. С прямого (рис. 15.11, г) и инверсного (рис. 15.11,д) выходов триггера сигналы поступают на входы логических ячеек ИЗ,И4, куда поступает также сигнал с выхода схемы совпадения И1. На выходе логических схем 3, 4 будут вырабатываться определенные импуль сы (рис. 15.11, е, ж). Формирователи импульсов 5,6 укорачивают импульсы по длительности до и подают их на вычитающее устройство 7(ВУ), на выходе которого формируется полный квазитроичный сигнал (рис. 15.11, з)
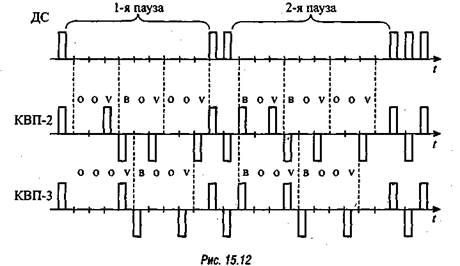
Сигнал с ЧПИ обладает одним существенным недостатком — при появлении в нем длинных серий пробелов (нулей) возможен сбой системы тактовой синхронизации. Чтобы этого не происходило, следует ограничить в линейном сигнале, передаваемом в коде ЧПИ, число подряд следующих нулей. Эта задача была решена созданием кодов с высокой плотностью единиц ; такой код еще называют модифицированным квазитроичным кодом (МЧПИ). Здесь — некоторое максимально допустимое число следующих подряд нулей после предыдущей единицы в исходном ДС. Обычно принимают или 3, что соответствует кодам КВП-2 и КВП-3 (или HDB-2, -3 в англоязычной терминологии). Если в реальном «пакете» нулей их число будет меньше , то линейное кодирование осуществляется по коду ЧПИ, т.е. нули не преобразуются, а каждая единица имеет длительность в половину тактового интервала , причем ее полярность противоположна полярности предыдущей единицы.
Если в «пакете» нулей их число больше , то каждый пакет из нулей заменяется сигналами 000 Vили 500 V (для КВП-3).
Полярности вводимых импульсов В и К выбираются так, чтобы на интервале в тактов происходило одно нарушение правила чередования полярности. По этому нарушению на приемной стороне оконечной станции при преобразовании ЛС в ДС принимают решение об истинном содержании пакета. При выборе конкретного вида сигнала (000 V или В00V) исходят из следующих условий: полярность импульса В всегда противоположна полярности предшествующего импульса; если между двумя соседними паузами в двоичном сигнале, имеющими число нулей больше, чем q+1 = 3 + 1=4, насчитывается четное число единиц, то заполнение второй паузы начинается с сигнала В00V; если число единиц между двумя вышеупомянутыми паузами нечетное, то заполнение второй паузы начинается с сигнала 000V.
В процессе заполнения очень длинной паузы пакет из (q + 1) нулей заменяется комбинацией BOO V, если предшествующее число «пакетов» в паузе нечетное; «пакет» из (q + 1) нулей заменяется комбинацией 000V, если предшествующее число «пакетов» в паузе четное (или нуль). Пример использования алгоритма формирования кода КВП-2 и КВП-3 приведен на рис. 15.12.
Линейный сигнал в коде МЧПИ (HDB), передаваемый трехуровневым кодом с той же тактовой частотой, что и исходный двоичный сигнал, широко используется в первичных, вторичных и третичных ЦСП (ИКМ-30, ИКМ-120, ИКМ-480), работающих по металлическим кабелям (симметричным и коаксиальным). Кроме того, он применяется и как «стыковой» сигнал в оконечной аппаратуре для соединения разных иерархических структур.
Возможность исключения длинных пакетов нулей или единиц обеспечивает также третий способ преобразования ДС в ЛС с сохранением тактовой частоты и числа разрешенных уровней, называемый скремблированием.При этом ДС подвергается операции перемножения с некоторой, известной заранее псевдослучайной двоичной последовательностью (ПСП): ЛС = ДС + ПСП. На приемной стороне выполняется обратная операция: ДС = ЛС + ПСП (знак + здесь и далее означает сложение по модулю 2). Для правильного восстановления исходного сигнала псевдослучайные последовательности, вырабатываемые на приемной и передающей сторонах, должны быть засинхронизированы.
Для того чтобы сделать операцию дескремблирования самосинхронизирую- щейся,применяют решение, приведенное на рис. 15.13. Здесь скремблер 1 содержит сумматор по модулю 2 и формирователь псевдослучайной последовательности (ФПСП) 3. Дескремблер 4 содержит аналогичные блоки (рис. 15.13, а).
Для того чтобы сделать операцию дескремблирования самосинхро- низирующейся,т.е. не требующей формирования специального сигнала синхронизации на передающей стороне и его поиска на приемной стороне, применяют решение, приведенное на рис. 15.13. Здесь скремблер 1 содержит сумматор по модулю 2 и формирователь псевдослучайной последовательности (ФПСП) 3. Дескремблер 4 содержит аналогичные блоки (рис. 15.13, а).
Формирователь двоичной ПСП включает в себя n-разрядный регистр сдвига (триггеры , управляемый импульсами тактовой частоты ИУ от генераторного оборудования, а также некоторое количество сумматоров по модулю 2, соединенных с выходами соответствующих триггеров (рис. 15.13, б). Элемент на схеме отражает наличие ) или отсутствие связи триггера 7} со схемой сложения.
Скремблированный сигнал S представляет собой результат потактового сложения по модулю 2 исходного двоичного сигнала D и псевдослучайного R: S= Дескремблированный сигнал равен соответственно При отсутствии ошибок в канале связи, когда , имеем ,=D. Параметры ФПСП определяются видом алгебраического полинома, описывающего структуру ПСП, ,.С увеличением числа п растет период ПСП, равный , и соответственно сдвигается влево «провал» в спектре скремблированного сигнала S (см. штриховую функцию на рис. 15.5, б). С увеличением числа k ненулевых коэффициентов Cj этот «провал» углубляется и расширяется по частоте, однако при этом в случае появления в канале передачи одиночных ошибок дескремблер «размножает» их в (k + 1) раз. Практическое применение получили ФПСП с компромиссными параметрами[23]: (т.е. «=15, ) и ( = 10, = 1; k = 3). Отметим, что линейный сигнал, полученный путем скремблирования (см. рис. 15.13, а), остается униполярным и имеет постоянную составляющую, которая хотя и не равна 0, но изменяется в очень малых пределах. Это позволяет «потерять» ее в линейном тракте (из-за разделительных элементов), а затем «восстановить» в регенераторе, не искажая форму импульсов.

 и подают их на вычитающее устройство 7(ВУ), на выходе которого формируется полный квазитроичный сигнал (рис. 15.11, з)
и подают их на вычитающее устройство 7(ВУ), на выходе которого формируется полный квазитроичный сигнал (рис. 15.11, з)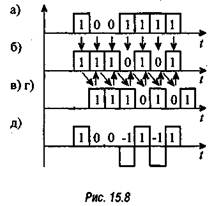
 ; такой код еще называют модифицированным квазитроичным кодом (МЧПИ). Здесь
; такой код еще называют модифицированным квазитроичным кодом (МЧПИ). Здесь  — некоторое максимально допустимое число следующих подряд нулей после предыдущей единицы в исходном ДС. Обычно принимают
— некоторое максимально допустимое число следующих подряд нулей после предыдущей единицы в исходном ДС. Обычно принимают  или 3, что соответствует кодам КВП-2 и КВП-3 (или HDB-2, -3 в англоязычной терминологии). Если в реальном «пакете» нулей их число будет меньше
или 3, что соответствует кодам КВП-2 и КВП-3 (или HDB-2, -3 в англоязычной терминологии). Если в реальном «пакете» нулей их число будет меньше  , то линейное кодирование осуществляется по коду ЧПИ, т.е. нули не преобразуются, а каждая единица имеет длительность в половину тактового интервала
, то линейное кодирование осуществляется по коду ЧПИ, т.е. нули не преобразуются, а каждая единица имеет длительность в половину тактового интервала  , причем ее полярность противоположна полярности предыдущей единицы.
, причем ее полярность противоположна полярности предыдущей единицы. , то каждый пакет из
, то каждый пакет из  нулей заменяется сигналами 000 Vили 500 V (для КВП-3).
нулей заменяется сигналами 000 Vили 500 V (для КВП-3). тактов происходило одно нарушение правила чередования полярности. По этому нарушению на приемной стороне оконечной станции при преобразовании ЛС в ДС принимают решение об истинном содержании пакета. При выборе конкретного вида сигнала (000 V или В00V) исходят из следующих условий: полярность импульса В всегда противоположна полярности предшествующего импульса; если между двумя соседними паузами в двоичном сигнале, имеющими число нулей больше, чем q+1 = 3 + 1=4, насчитывается четное число единиц, то заполнение второй паузы начинается с сигнала В00V; если число единиц между двумя вышеупомянутыми паузами нечетное, то заполнение второй паузы начинается с сигнала 000V.
тактов происходило одно нарушение правила чередования полярности. По этому нарушению на приемной стороне оконечной станции при преобразовании ЛС в ДС принимают решение об истинном содержании пакета. При выборе конкретного вида сигнала (000 V или В00V) исходят из следующих условий: полярность импульса В всегда противоположна полярности предшествующего импульса; если между двумя соседними паузами в двоичном сигнале, имеющими число нулей больше, чем q+1 = 3 + 1=4, насчитывается четное число единиц, то заполнение второй паузы начинается с сигнала В00V; если число единиц между двумя вышеупомянутыми паузами нечетное, то заполнение второй паузы начинается с сигнала 000V.
 , управляемый импульсами тактовой частоты ИУ от генераторного оборудования, а также некоторое количество сумматоров по модулю 2, соединенных с выходами соответствующих триггеров (рис. 15.13, б). Элемент
, управляемый импульсами тактовой частоты ИУ от генераторного оборудования, а также некоторое количество сумматоров по модулю 2, соединенных с выходами соответствующих триггеров (рис. 15.13, б). Элемент  на схеме отражает наличие
на схеме отражает наличие  ) или отсутствие
) или отсутствие  связи триггера 7} со схемой сложения.
связи триггера 7} со схемой сложения.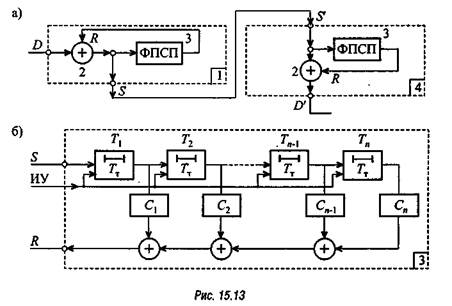
 Дескремблированный сигнал
Дескремблированный сигнал  равен соответственно
равен соответственно  При отсутствии ошибок в канале связи, когда
При отсутствии ошибок в канале связи, когда  , имеем
, имеем  ,=D. Параметры ФПСП определяются видом алгебраического полинома, описывающего структуру ПСП,
,=D. Параметры ФПСП определяются видом алгебраического полинома, описывающего структуру ПСП,  ,.С увеличением числа п растет период ПСП, равный
,.С увеличением числа п растет период ПСП, равный  , и соответственно сдвигается влево «провал» в спектре скремблированного сигнала S (см. штриховую функцию на рис. 15.5, б). С увеличением числа k ненулевых коэффициентов Cj этот «провал» углубляется и расширяется по частоте, однако при этом в случае появления в канале передачи одиночных ошибок дескремблер «размножает» их в (k + 1) раз. Практическое применение получили ФПСП с компромиссными параметрами[23]:
, и соответственно сдвигается влево «провал» в спектре скремблированного сигнала S (см. штриховую функцию на рис. 15.5, б). С увеличением числа k ненулевых коэффициентов Cj этот «провал» углубляется и расширяется по частоте, однако при этом в случае появления в канале передачи одиночных ошибок дескремблер «размножает» их в (k + 1) раз. Практическое применение получили ФПСП с компромиссными параметрами[23]:  (т.е. «=15,
(т.е. «=15,  ) и
) и 
 (
(  = 10,
= 10,  = 1; k = 3). Отметим, что линейный сигнал, полученный путем скремблирования (см. рис. 15.13, а), остается униполярным и имеет постоянную составляющую, которая хотя и не равна 0, но изменяется в очень малых пределах. Это позволяет «потерять» ее в линейном тракте (из-за разделительных элементов), а затем «восстановить» в регенераторе, не искажая форму импульсов.
= 1; k = 3). Отметим, что линейный сигнал, полученный путем скремблирования (см. рис. 15.13, а), остается униполярным и имеет постоянную составляющую, которая хотя и не равна 0, но изменяется в очень малых пределах. Это позволяет «потерять» ее в линейном тракте (из-за разделительных элементов), а затем «восстановить» в регенераторе, не искажая форму импульсов.