Колебательное движение происходит при условии, если на точку М, отклоненную от положения покоя, действует сила Р, стремящаяся вернуть точку в это начальное положение. Такая сила называется восстанавливающей.
Пусть восстанавливающая сила пропорциональна отклонению от положения покоя, т.е. Р= с*ОМ, где с- постоянный коэффициент. Это может быть сила упругости пружины.
Пусть, например, тело весом G, лежащее на гладкой горизонтальной поверхности в положении О (рис.10.3) соединено с недеформированной пружиной, другой конец которой закреплен в точке А. Силы уравновешены.
Рис. 10.3
При отклонении в положение М1 на тело будет действовать сила упругости пружины, стремящаяся вернуть его в положение покоя
Р1= с*ОМ1.
Различают 4 основных случев колебательного движения материальной точки:
1) свободные колебания под действием только восстанавливающей силы;
2) свободные колебания под действием восстанавливающей силы и силы сопротивления движению;
3) вынужденные колебания под действием восстанавливающей силы и силы периодического характера, возмущающей силы;
4) вынужденные колебания под действием восстанавливающей силы, возмущающей силы и силы сопротивления движению.
Рассмотрим свободные колебания материальной точки при наличии восстанавливающей силы и силы сопротивления движению, которая всегда направлена против движения точки.
Положим, что восстанавливающая сила описывается уравнением
Р= с|x|,
а сила сопротивления- уравнением
R= - au,
где х – смещение точки от начала координат; a - коэффициент пропорциональности, часто определяемый как обобщенный коэффициент трения.
Проекции сил на ось х записываются в форме
Рх=- сх; Rx=- adx/dt. (10-20)
Cоставим дифференциальное уравнение
md2x/dt2= åXi= Px+ Rx= -cx- adx/dt
или
d2x/dt2+(a/m)dx/dt+ (c/m)x= 0,
или
d2x/dt2+2ndx/dt+ k2 x= 0, (10-21)
где m- масса материальной точки; n=a/m- коэффициент сопротивления среды или коэффициент затухания; k= (c/m)1/2- частота свободных колебаний или собственная частота рассматриваемой системы (материальной точки и связей).
Уравнение (10-21) может быть также переписано в форме
(p2+ 2np+k2)x= 0, (10-22)
где p= d/dt- оператор дифференцирования.
Применяется еще одна модификация уравнения (10-22)
(T2p2+2zTp+1)x=0, (10-23)
где T= 1/k – постоянная времени данной системы; z=2n/ k2 – коэффициент относительного демпфирования.
Для интегрирования (10-21) используем характеристическое уравнение
p2+ 2np+k2= 0,
р1,2=- n± (n2- k2)1/2. (10-24)
Если n< k, то корни (10-24) будут комплексными и тогда общее решение записывается в форме
x= e-nt[C1cos(k2- n2)1/2t+ C2sin(k2- n2)1/2t).
Введя новые постоянные C1= a sinβ, C2= a cosβ , и подставив их в это уравнение, получим
x=a e-nt sin(wt+β), (10-25)
где w= (k2- n2)1/2- собственная циклическая частота колебаний данной системы; a, β - постоянные, определяемые из начальных условий, причем β характеризует начальную фазу колебаний.
Движение по уравнению (10-25) имеет колебательный характер, т.к. координата х периодически изменяет свой знак.
Поскольку |sin(wt+β)|£ 1, то абсолютная величина х удовлетворяет условию |x|£ | a e-nt |. Это означает, что график колебаний (рис. 10.4) заключен между двумя симметричными относительно оси х кривыми, имеющими уравнения х=- a e-nt; х= a e-nt.
Рис. 10.4
Такие колебания называются затухающими.
Период колебаний Т* представляет собой промежуток времени между двумя последовательными прохождениями точки в одном направлении через положение покоя:
Т*=2p/k*=2p/w. (10-26)
Отвлеченное число e-nT*/2 называется декрементом колебаний.
Если в данной системе будут отсутствовать потери на трение n=0, то система будет называться консервативной, и уравнение (10-21) станет
d2x/dt2+ k2 x= 0. (10-27)
а решение примет вид (см. (10-25))
x=a sin(w0 t+β), (10-28)
где w0= k- собственная циклическая частота колебаний консервативной системы; а –амплитуда колебаний.
Колебания в такой систем незатухающие и их график показан на рис. 10.5
Период колебаний будет равен
Т*0=2p/k= 2p/w0. (10-29)
Рис. 10.5
Из сравнения (10-26) и (10-29) видно, что период свободных затухающих колебаний соотносится периодом свободных незатухающих колебаний как
Период колебаний при наличии затухания больше, чем при отсутствии затухания.
Если n> k, то корни (10-24) будут вещественными отрицательными и различными, т.е.
p1,2= -n±(n2-k2)1/2,
и тогда общее решение запишется в форме
x= e-nt[C1 + C2 ]. (10-31)
Вводя новые постоянные и переходя к гиперболическим функциям, можно получить следующее уравнение
x= ae-ntsh(t+ β). (10-32)
График движения по этому уравнению приведен на рис. 10.6
Рис. 10.6.
Такое движение назы-вается апериод-ческим, а система тел- апериодической 2-го порядка.
Если массой точки можно пренебречь m=0, то дифференциальное уравнение колебаний приводится к виду
adx/dt+ сх=0
или
dx/dt+ lх=0 (10-33)
или
(р+ l)х=0, (10-34)
где l= с/a.
Решение записывается в форме
x= C1e-lt.
Постоянная С1 определяется из начальных условий. Тело (точка) выведенное из положения покоя возвращается назад по кривой 3, приведенной на рис.10.6.
Такое движение тоже называется апериодическим, а система- апериодической 1-го порядка.
Если n=k, то корни уравнений (10-21), (10-22) будут вещественными и равными и отрицательными.
Общее решение будет иметь вид
x=e-nt(C1t+ C2). (10-35)
Для начальных условий t=0, x= x0, dx/dt= u0 решение имеет вид
x=e-nt[x0+(u0+ nx0)t. (10-36)
Движение, определяемое этим уравнением тоже называется апериодическим.
Пример 10.1. Груз весом G подвешен на двух последовательно соединенных пружинах (рис.10.7), имеющих коэффициенты жесткости с1 и с2. Определить период свободных колебаний, пренебрегая потерями на трение.
Рис.10.7.
Решение. В связи с отсутствием трения систему можно рассматривать как консервативную.
Период колебаний равен
Т*0=2p/k.
k= (c/m)1/2.
Направим ось у из точки закрепления пружины вниз. По аналогии с (10-20) следует, что с= - Р/у. Поэтому
Пример 10.2. К пружине жесткостью с= 10 сН/см, закрепленную неподвижно в точке А (рис.10.8) прикреплена стальная пластинка массой m= 0,05кг, находящаяся между полюсами магнита. Магнитный поток равен Ф= 2*10-5 вебер. Сила сопротивления движению пластинки R= mФ2u, где m=109; u - скорость в м/с.
Определить движение пластинки, если ей сообщить начальную скорость u= 26,8 см/с, направленную вниз.
Рис. 10.8
Решение. Направим ось у вниз, а за начало координат примем положение центра тяжести пластинки, соответствующее статическому удлинению пружины. Тогда начальные условия будут: t=0; y0=0;dy0 /dt= u0.
На движущуюся пластинку в положении М действуют силы: G- сила тяжести; Р- сила упругости пружины, проекция которой на ось у равна Py= - c(yст+y), и сила сопротивления R= mФ2u , имеющая проекцию на ось у Ry=-mФ2dy/dt.
Дифференциальное уравнение движения пластинки имеет вид
md2y/dt2=åYi= Py+Ry+G= -c(yст+y)- mФ2dy/dt+ G.
Т.к. Рст= суст= G , то получим
md2y/dt2= -cy- mФ2dy/dt
или
d2y/dt2+ (mФ2/m)dy/dt+ (c/m)y= 0. (10-38)
Отсюда, обращаясь к уравнению (10-21), следует, что
2n= mФ2/m и n=109 *4*10-10 /(2*0,05)= 4c-1 ;
c=10сН/см=10 Н/м;
k2=c/m и k=(c/m)1/2=(10/0,05)1/2= 14,14 с-1 .
Т.к. n< k, то движение пластинки является колебательным затухающим. Уравнение может быть записано в форме
y= ae-ntsin(t+ β).
Постоянные a, β определим из начальных условий.
После первого дифференцирования по этого уравнения получим
dy/dt=- nae-ntsin(t+ β)+ a-ntcos(t+ β)=
=- nу+ a(e-ntcos(t+ β). (10-39)
Т.к. в начальный момент t=0, y=y0 =0, dy/dt= u0, то
Дифференциальное уравнение вынужденных колебаний малой амплитуды при наличии сопротивления движению записывается в форме
md2x/dt2+ adx/dt+ cx= F(t). (10-40)
Это уравнение может быть переписано в форме
d2x/dt2+ (a/m) dx/dt+ (c/m) x= (1/m)F(t). (10-41)
или
d2x/dt2+2ndx/dt+ k2 x=(1/m)F(t). (10-42)
Коэффициенты в этих уравнениях имеют тот же смысл, что и в уравнениях (10-21), (10-22). F(t) – обобщенная внешняя сила, изменяющаяся во времени; х - обобщенная координата.
В операторной форме уравнение (10-42) имеет вид
(p2+ 2np+k2)x(t)= (1/m)F(t) (10-43)
или
(T2p2+2zTp+1)x(t)= (1/m)F(t), (10-44)
Общее решение равно сумме его частного решения х1 и общего решения х2 линейного однородного уравнения с постоянными коэффициентами (при F(t) =0).
Решение, характеризующее свободные затухающие колебания системы, записывается в форме
x2 =a e-nt sin(wt+β).
Подобные уравнения достаточно просто решаются с использованием операторного метода решения или с использований интегрального преобразования Лапласа.
F(s)= e-stf(t)dt, (10-45)
где f(t)- действительная функция, называется оригиналом; t- время; s= s+jw. – комплексная переменная; F(s) - изображение функции f(t) на комплексной плоскости. [2].
Преобразование имеет следующие основные свойства:
1. Умножение аргумента оригинала или изображения на некоторое число приводит к делению изображения или оригинала и их аргумента на это же число
f(at)® (1/a)F(s/a); F(as)®(1/a)f(t/a).
Здесь под аргументом понимается соответственно t и s.
2. Изображение суммы конечного числа оригиналов равно сумме их изображений
[f(t)+ j(t)]® [F(s)+ j(s)].
3. Изображение произведения оригинала на постоянную величину равно произведению изображения на эту постоянную
af(t)® aF(s). )
4. Произведение двух изображений является изображением и равносильно свертыванию оригиналов
F(s)G(s) ® f(t)g(t-t)dt.
Интеграл в правой части называется сверткой.
5. Изображение производных оригиналов находится из соотношения
f(n)(t) ® snF(s) - f(t=+0)sn-1- f ’(t=+0)sn-2…
... f (n-2)(t=+0)s - f (n-1)(t=+0),
где f (n)(t) - производная n-го порядка от f(t) по t; f(t=+0), f ’(t=+0),… f (n-1)(t=+0)- предельные значения, к которым стремятся функция- оригинал и ее производные, когда t стремится к нулю справа. Эти значения называются правосторонними начальными условиями.
При нулевых правосторонних начальных условиях
f(t=+0)= f ’(t=+0)=…f (n-2)(t=+0)= f (n-1)(t=+0)= 0
дифференцирование сводится к соотношению
f(n)(t) ® snF(s).
6. Интегрирование оригинала от нуля до переменной t соответствует в пространстве изображений делению изображения на s
f(t) dt ® (1/s)F(s).
Для ряда случаев, разработаны таблицы перехода от оригиналов к изображениям и наоборот, приведенные в табл. 2.1.
Пусть движение в какой- либо системе описывается дифференциальным уравнением с постоянными коэффициентами
andny/dtn+ an-1dn-1y/dtn-1+…+ a1dy/dt+ a0 y(t)=
=bm dmx/dtm+ bm-1dm-1x/dtm-1+…+ b1dx/dt+ b0x(t) .
Проведем преобразование уравнения (2-40) по Лапласу при нулевых начальных условиях, используя свойства 2,3,5
( ansn + an-1sn-1+…+ a1s + a0) Y(s)=
=(bm sm + bm-1 sm-1+…+ b1s + b0 )X(s) .
Если y- выходная переменная, а х- входная, то отношение
bm sm + bm-1 sm-1+…+ b1s + b0
W(s)= Y(s)/X(s)=
ansn + an-1sn-1+…+ a1s + a0,
называется передаточной функцией.
Введем оператор pºd/dt и перепишем уравнение (2-42)
bm p m + bm-1 p m-1+…+ b1 p + b0
y(t) = x(t) .
an p n + an-1 p n-1+…+ a1 p + a0,
Это выражение формально совпадает с подобным выражением, определенным из (2-40). Следовательно, передаточная функция определяет связь между выходной и входной переменными в пространстве оригиналов.
Операторный полином левой части уравнений (2-40) и (2-41) характеризует собственные свойства системы, которые не зависят от внешних воздействий. Влияние воздействия описывается правым полиномом.
Характеристическое уравнение, соответствующее дифференциальному уравнению (2-40) имеет вид
аnln+an-1ln-1+…+a1l+ a0 = 0. (2-44)
Поэтому полином
D(p)= аnpn+an-1p-1+…+a1p+a0
называется характеристическим полиномом.
Динамическая система подвергается различным воздействиям. Обычно рассматривают некоторые, типовые. Зная реакцию на них, можно прогнозировать поведение системы в различных ситуациях.
Внешняя сила может изменяться по разным законам. Рассмотрим некоторые случаи.
1. F(t)= F0cos(Wt).
Поскольку с течением времени x2стремится к нулю, то установившиеся колебания будут изменяться по гармоническому закону с той же циклической частотой w, однако амплитуда и начальная фаза будут другими:
x=Acos(wt+ j), (10-46)
где A= F0/{c[k2-w2)2+4n2w2]1/2- амплитуда колебаний;
j=- arctg[2nw/(k2- w2)]- сдвиг по фазе.
Решение в этом случае сводится к определению передаточных и частотных характеристик.
Уравнение (10-40) перепишем в форме
[(m/с)р2 + (a/с)p+ 1]x(t) =с-1F(t).
Подставляя в это уравнение вместо p переменную Лапласа s= jw, (w- частота возмущающих колебаний) получим в изображениях по Лапласу
X(s)[(m/с)s2 + (a/с)s+ 1]= F(s)/c. (10-47)
Передаточная функция при нулевых начальных условиях запишется в форме
W(s)=X(s)/F(s)=c-1/[(m/с)s2 + (a/с)s+ 1]. (10-48)
Передаточная функция описывает отношение изображений по Лапласу выходной координаты к входному (внешнему) воздействию.
Модуль этой величины характеризует отношение амплитуд установившихся колебаний входной и выходной величин от частоты
а фазовая характеристика характеризует сдвиг по фазе колебаний выходной и входной величин
j= - arctg{(wa/с)/[1-(m/с)w2]}, (10-50)
который увеличивается с ростом потерь на трение.
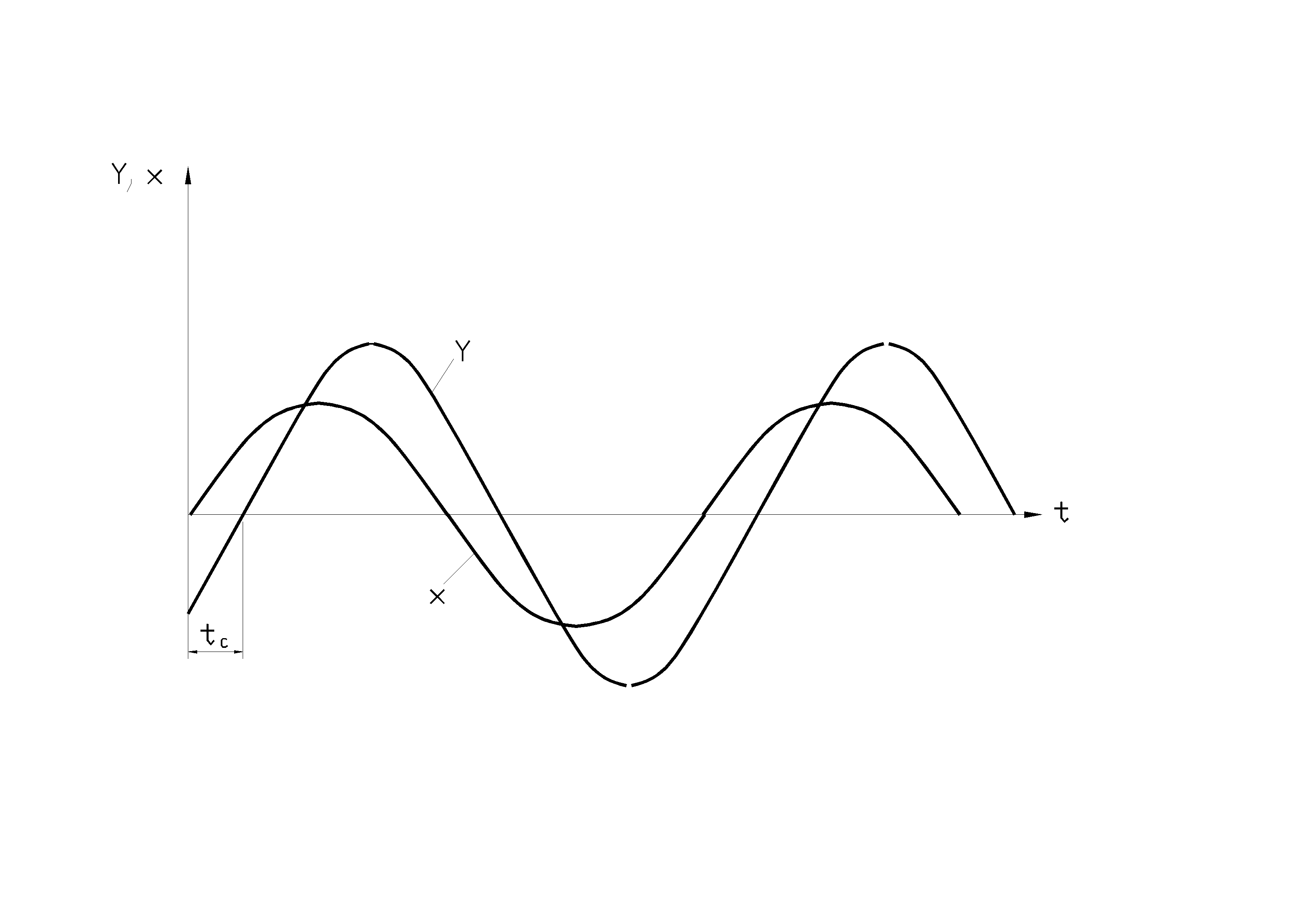
На рис.10.9 показаны кривые входного х и выходного сигналов у,
Рис. 10.9
Соотношение колебаний на входе и выходе звена или системы.
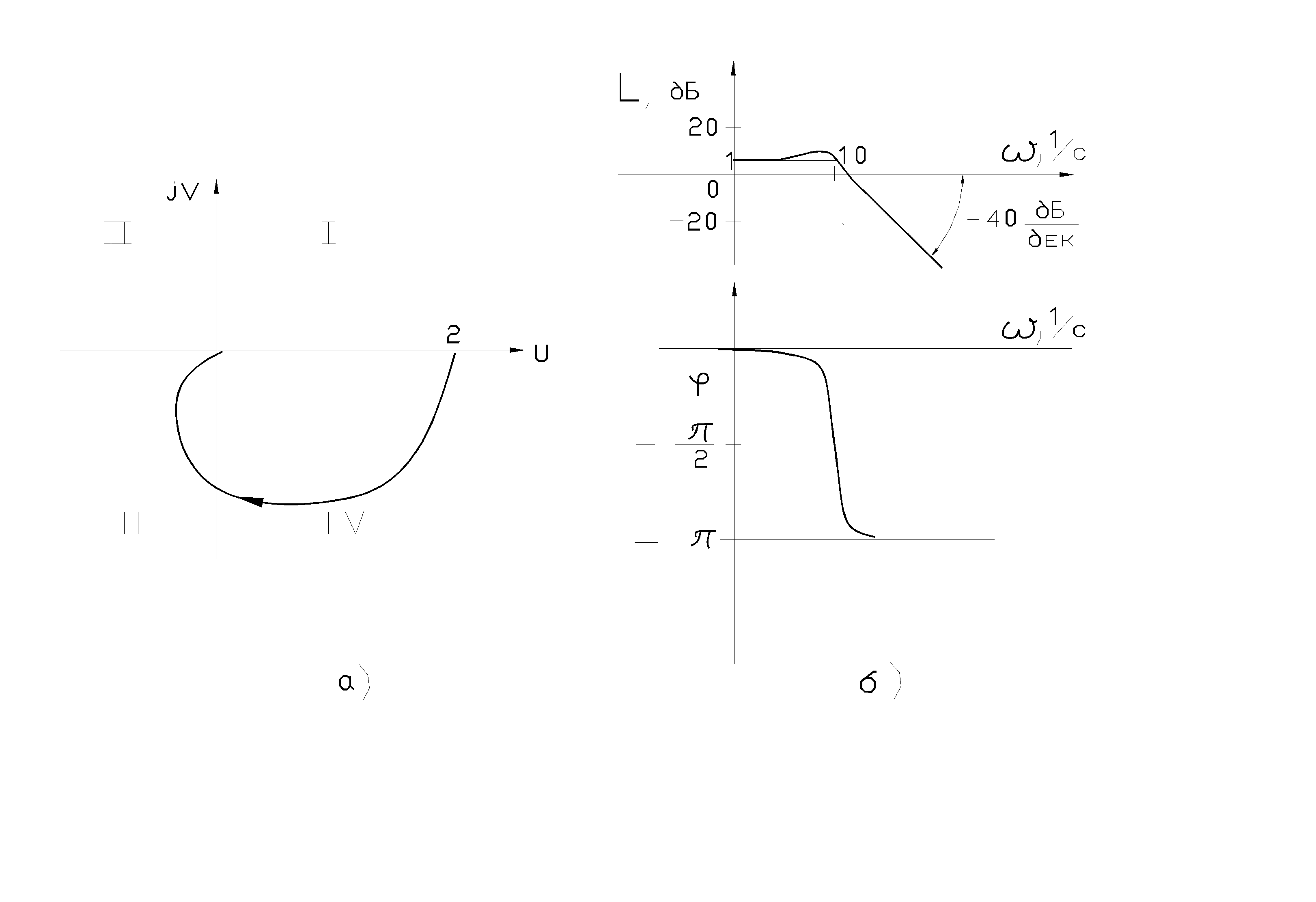
а на рис.10.10 в качестве примера приведены частотные характеристики колебательной системы, имеющей некоторое демпфирование.
Рис. 10.10
На рис.10.10,б приведены логарифмическая амплитудно-частотная и фазо- частотная характеристики. Здесь всплеск L соответствует резонансу. Величина всплеска зависит от демпфирования, т.е. коэффициента n. Резонансная частота равна:
wр= (с/m)1/2. (10-51)
Амплитуда колебаний при резонансе равна
А= c-1F0[(1- wp2m/с )2+(wpa/с)2]1/2. (10-52)
Передаточные функции и частотные характеристики системы тел дают большую информацию о динамических свойствах данной системы.
При частоте возмущающей силы, близкой частоте свободных колебаний в случае отсутствия трения наступает явление, называемое биениями. Период изменения амплитуды при этом составляет
ТА=4p/(р- k),
где р - частота вынужденных колебаний материальной точки.
Поскольку р» k , то ТА стремится к бесконечности.
2. Внешнее воздействие изменяется скачком, т.е. F(t)= F0*1(t).
Реакция системы на такое воздействие называется переходным процессом или характеристику.
Найти переходную характеристику звена с передаточной функцией
=-zT-1± [(z2-1)/T2]0,5= -z T-1± j[(1- z 2)/T 2]0,5= -a ± jw ,
где z <1.
Применив формулу пересчета, после раскрытия скобок и приведения подобных членов, получим
x(t)= bc{1- exp(-a t)[cos(wt)+ aw-1sin(wt)]}.
T- называется постоянной времени звена; z - коэффициентом демпфирования. Чем меньше Т , тем быстрее завершается переходный процесс. Значение z оказывает влияние на величину перерегулирования.
Звено с такой характеристикой называется колебательным.
Если z> 1, то корни характеристического полинома D(s) будут отрицательными действительными числами. Тогда переходная функция станет
Звено с такой характеристикой называется апериодическим 2-го порядка.
При z=1
x(t)= bc [ 1- (1+t/T)exp(-t/T)].
В случае z=0
x(t)= bc [ 1- cos(t/T))].
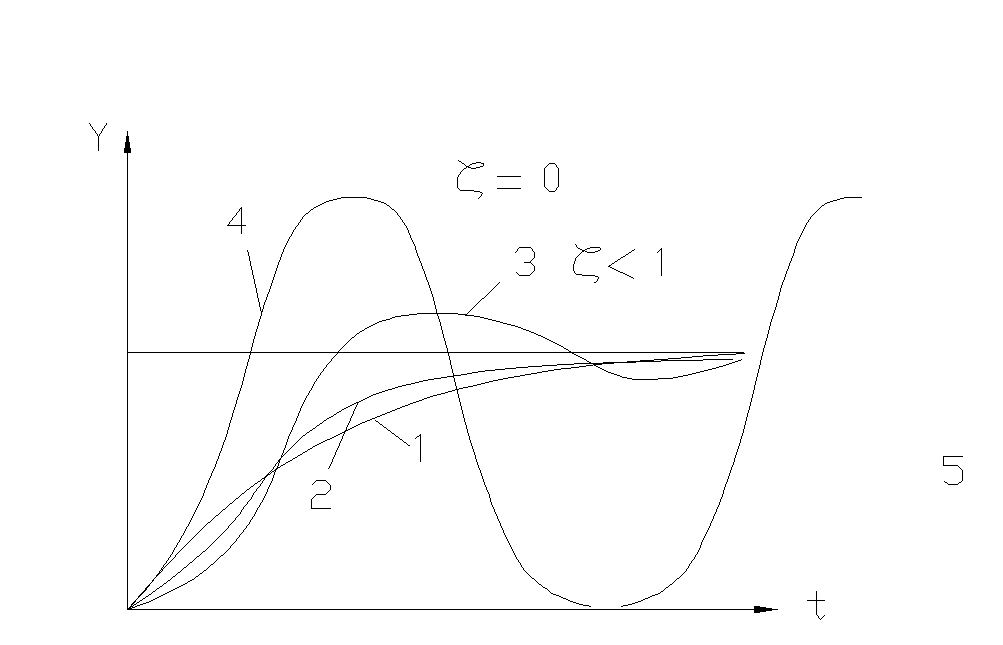
Звено с такой характеристикой называется консервативным. На рис. 10.11 показаны переходные характеристики рассмотренных звеньев.
Рис. 10.11
Переходные характеристики:
1- апериодическое звено 1-го порядка;
2- апериодическое звено 2-го порядка;
3- колебательное звено;
4- консервативное звено (z=0).
Пример 10.3. Прямоугольная пластина весом 0,5Н, помещенная в сосуд с вязкой жидкостью прикреплена к концу пружины АВ с коэффициентом жесткости с= 0,25 Н/см. В некоторое мгновение ползунок А начинает совершать гармонические колебания y1=b sin(wt), где b = 2 см, w = 15с-1. Коэффициент силы сопротивления Fu= auравен a= 3,06мН*с/см.
Получить уравнение вынужденных колебаний.
Решение. Пластинку будем рассматривать как материальную точку с массой m= G/g= 0,5/9,80= 0,051 кг. с= 25Н/м; b= 0,02 м; a= 0,306 Н*с/м
Совместим начало координат О с положением покоя точки М, соответствующим статическому удлинению уст пружины при условии, что ползунок А, удерживающий пластину М, имеющую координату у (рис. 10.12) занимает среднее положение О1. На движущуюся пластину действуют силы: силы тяжести G, упругости пружины P, сила сопротивления жидкости Fu.
Рис. 10.12
Отклонение пластинки у от положения покоя О превышает отклонение ползунка у1 от его среднего положения на величину динамического удлинения пружины, равному у- у1.
Полное удлинение пружины
Dl=yст+ y- y1.
Проекция силы Р на ось у
Рy= - cDl.
Проекция силы сопротивления
Fuу= -auу= - ady/dt.
Дифференциальное уравнение движения
md2y/dt2= åYi= - c(yст+ y- y1)- ady/dt+ G.
или
(mp2+ ap+ c) y(t)=-cyст+ сy1(t) + G.
Здесь рºd/dt.
Поскольку G= cyст, это уравнение можно переписать
[(m/c)p2+ (a/c) p+ 1) y(t)=с y1(t)/c= b sin(wt).
Откуда амплитуда установившихся вынужденных колебаний будет

 + C2
+ C2  ]. (10-31)
]. (10-31) t+ β). (10-32)
t+ β). (10-32)
 t+ β).
t+ β). -ntcos(
-ntcos(  cosβ или (u0+ny0 ) /
cosβ или (u0+ny0 ) /  e-stf(t)dt, (10-45)
e-stf(t)dt, (10-45) f(t)g(t-t)dt.
f(t)g(t-t)dt.