Пусть даны параллельные силы Р1, Р2,… Рn, расположенные на плоскости и приложенные в точках А1, А2,… Аn.
Приведем силы к произвольному центру О.
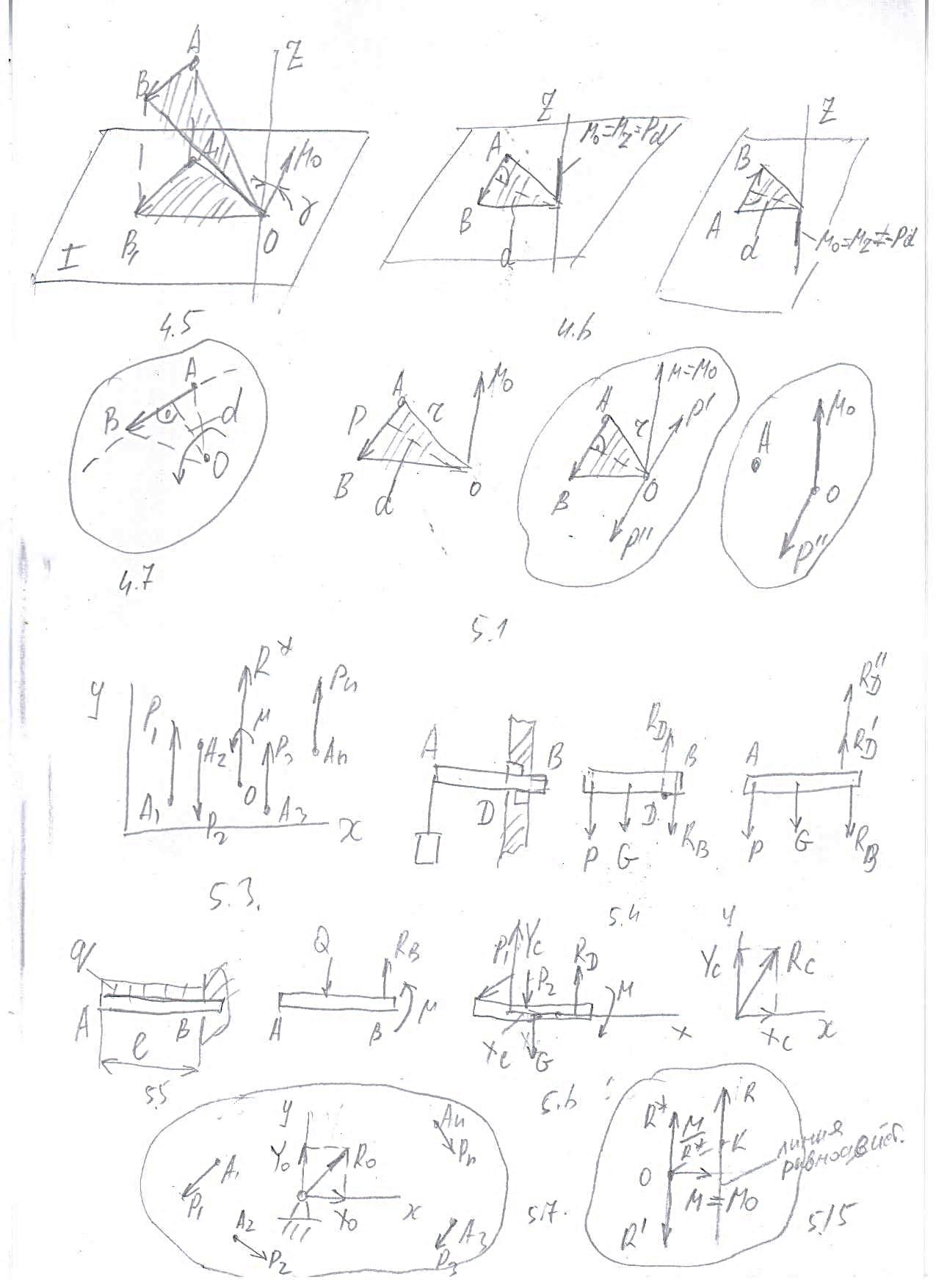
Получим в этом центре силу R*, равную главному вектору, и пару сил с моментом М (рис. 5.3).
Рис. 5.3.
Вычислим проекции главного вектора на координатные оси x, y, направив ось параллельно силам:
= 0, Y= = ,
где Yi= +Pi, если направление силы Pi совпадает с направлением оси y и Yi= -Pi, если их направления противоположны. Т.к. Х=0, то главный вектор R* направлен по оси y. При Y= > 0 направление главного вектора R* совпадает с направлением оси y, а при Y= < 0 направление R* противоположно направлению оси.
Т.о.
R*= |Y|= |= ||,
т.е. главный вектор системы параллельных сил параллелен силам, его модуль равен абсолютному значению алгебраической суммы проекций сил на ось, параллельную силам, а его направление определяется знаком этой суммы.
Момент пары сил, эквивалентной системе пар, появившихся в результате приведения, равен главному моменту параллельных сил относительно центра приведения М= .
Для параллельных сил на плоскости возможны все те же случаи приведения, что и для сил произвольно расположенных на плоскости. Параллельные силы, если они не уравновешиваются, можно привести к одной силе или к паре сил
Для систем параллельных сил на плоскости имеем два условия равновесия:
М=0, R*= 0.
С целью получения уравнений равновесия одну из осей координат, например y, направляют параллельно силам. Тогда все силы проектируются на ось y, а проекция каждой силы на ось х равна нулю. Два условия равновесия системы параллельных сил на плоскости можно выразить в виде двух уравнений:
=0; = . (5-5)
Эти уравнения называются основными уравнениями равновесия параллельных сил на плоскости. Центр моментов для этой системы уравнений можно выбирать произвольно.
Можно использовать и другую систему двух уравнений равновесия- по моментам.
Если число неизвестных не превышает число уравнений равновесия сил, то такие задачи называются статически определенными.
Если число неизвестных превышает число уравнений равновесия сил, то такие задачи называются статически неопределенными. Такие задачи нельзя решать методами статики твердого тела.
Примеры статически определимых задач.
Пример 5.1. На рис. 5.4,а показана схема закрепления балки. Дано: АВ=4м; DB= 0,5м ; G= 2 кН; P= 1 кН. Определить реакции опор.
Рис. 5.4
Решение:
а) показываем действующие на балку внешние силы G, P и реакции от связей RD, RB, направленные перпендикулярно к поверхности балки (рис. 5.4,б);
б) применяем условия равновесия вертикальных сил, действующих на балку:
=0; =0.
Правило знаков аналогично выше изложенному.
Сумму моментов составляем относительно В. При этом сила, приложенная к этой точке, не имеет момента.
=0; P*BA+ G*BC- RD*BD=0;
=0; -P- G+RD- RB= 0.
Из 1-го уравнения получим
RD= (P*BA+G*BC)/BD=(1*4+2*2)/0,5=16 кН.
Из 2-го- RB= -P-G+RD= -1-2+16= 13 кН.
Из анализа результата можно заметить, что момент в опорах, воспринимающий момент от G и P, равен RB*DB. Он образуется от пары сил RB, R’D. Причем R’D= RB, а в точке D действует дополнительная составляющая реакции R”D= R’D- RB= 16- 13= 3 кН.
Пример 5.2
Закрепление консольной балки показано на рис.5.5. Дано: АВ=l= = 1,2 м; q= 1,25 кН/м. Определить реакции заделки.
Рис. 5.5.
Равномерно распределенную нагрузку интенсивностью q заменим сосредоточенной силой, приложенной в середине участка АВ.
Q= ql= 1,25*1,2= 1,5 кНм.
Реакции заделки представляют собой силы, распределенные по всей опорной площади, причем на нижнюю поверхность балки действуют силы, направленные вверх, а на верхнюю- вниз. Из этой системы сил образуется вертикальная реакция опоры и реактивная пара сил, препятствующая вращению балки вокруг закрепленного конца. Момент этой пары сил называется опорным моментом (см. рис. 5.5,б). Направим реакцию опоры вверх, а реактивную пару – против вращения часовой стрелки.
=0; ql*l/2+ M= 0;
=0; - ql+ RB=0.
Откуда M= - ql2/2= - 0,9 кНм; RB=Q= 1,5 кН.
Полученный минус для момента означает, что реактивная пара сил имеет противоположное направление.
Пример 5.3. Закрепление балки показано на рис. 5.6

 Получим в этом центре силу R*, равную главному вектору, и пару сил с моментом М (рис. 5.3).
Получим в этом центре силу R*, равную главному вектору, и пару сил с моментом М (рис. 5.3). = 0, Y=
= 0, Y=  =
=  ,
, = |
= |  .
. . (5-5)
. (5-5) =0; P*BA+ G*BC- RD*BD=0;
=0; P*BA+ G*BC- RD*BD=0;
 =0;
=0;  = 0;
= 0;  =0.
=0. =0; P1*CK- P2*CE- G*CO+ RD*CD- |M|= 0;
=0; P1*CK- P2*CE- G*CO+ RD*CD- |M|= 0; = 0; - P1*cos 60°+ XC= 0;
= 0; - P1*cos 60°+ XC= 0;