Фрикционные передачи роликами осуществляют передачу движения между параллельными и пересекающимися валами.
Сила трения возникает на образующей роликов (рис. 4.1.а) или на их торцовых поверхностях (рис. 4.1.б).
Сила нормального давления Q/2 создается силами упругости составляющих дисков 1 и 2.
Размеры передачи зависят от диаметров роликов и , межосевого расстояния, равного а w= 0.5 ((Д1 + Д2).
Задаваясь диаметром , определяют , где - передаточное число.
Рис. 4.1. Схемы фрикционных передач
При геометрическом расчете диаметров дисков 1 и 2 фрикционных механизмов с гибкой связью 3 (рис. 8.в) значения (мм) для передач с резинотканевыми ремнями равны /3/:
, (4.1)
где - вращающий момент на валу малого шкива (н.м.).
Для синтетических ремней эта зависимость дает завышенные результаты. По этому при расчете рекомендуется предварительно выбрать толщину ремня d =0,5 мм или d =0,7 мм и диаметр определить из соотношения Д1 /d =60 - 150.
Наименьший размер шкива в таких механизмах РЭС составляет Д1min = 6 – 8 мм. В качестве гибкой связи используют шнуры из шелка, капрона, резины, пластмасс, стальные тросики, ленту, а также плоский, круглый и клиновый ремни.
Минимальное значение расчетного диаметра меньшего шкива (мм) клиноременных передач определяется из выражения:
Д1 ≈ 30∙(T1)1/3, (4.2)
где - крутящий момент на ведущем валу (н.м.).
Диаметр большего шкива равен , а вычисленные значения округляют до ближайших стандартных значений: 30; 45; 50; 56; 63; 71; 80; 90; 100; 112; 125; 140; 160; 180; 200 и т.д. Межосевое расстояние аw определяется конструктивными требованиями к ременному приводу и для плоскоременных передач:
аw > (1.5 – 2.0)×(Д1+ Д1 ) . (4.3)
Коэффициент 1.5 принимают для передач с синтетическими ремнями и 2.0 – для передач с резинотканевыми ремнями. Для клиноременных передач: аwравно
аwmin = 0.55×(Д1+ Д2 ) + h (4.4)
аwmax =2×(Д1+ Д2 ) (4.5)
Обычно для увеличения долговечности ремня принимают аw > аwmin и руководствуются следующей зависимостью:
аw = С×Д2 (4.6)
где C – числовой коэффициент равный 1.5 для передаточного числа U=1, C=1.2; для U=2, C=1.0, если U=3, C=0.95; для U=4, C=0.9, если U=5 и C=0.35; для U>6.
Расчетная длина ремня Lр стального тросика, ленты, шнура в зависимости от выбранного аwопределяется выражением /3/:
Значение угла зависит от тяговой способности и составляет для передач с резинотканевыми и синтетическими ремнями a1 >1500и клиноременных a1 >1200. По этому габариты клиноременных передач существенно меньше.
Достоинством передачи с гибкой связью, в качестве которой используется зубчатый ремень, является отсутствие скольжения. Зубчатый ремень (рис. 4.2) на внутренней поверхности имеет выступы или зубцы, расположенные с шагом Рр; зубцы входят в соответствующие впадины на шкивах.
Рис. 4.2. Основные размеры зубчатого ремня (а) и шкива (б)
Ремень состоит из жесткой кольцевой основы в виде тросиков 2 и резиновой массы 1. Согласно отраслевой нормали ОН-6-07-5-83, ремень характеризуется модулем m = Рр/π, общей толщиной Н, высотой зуба h, шириной В, углом 2γ=50° и толщиной S зуба. Стальные тросики диаметром d = 0.3 ÷ 0,75 мм размещают с шагом 1 ÷ 1,2 мм на расстоянии Δ от основания ремня. Число зубьев ремня берется равным 32, 36, 40, 45, 50, 56, 64, 71, 80, 90, 100, 112, 125, 140, 160. Рекомендуемые значения модуля m: в зависимости от передаваемой мощности Р имеют вид: для P ≤ 0,4 кВт, m = 2 мм или m = 3 мм, для 0,4 ≤ Р ≤ 3,0 кВт, m = 3 мм или m = 4 мм; для Р > 3 кВт, значения m = 4 мм или m = 5 мм.
При расчете размеров зубчатого шкива определяют диаметр начальной окружности Д0, соответствующий положению стальных тросиков в зубчатом ремне, когда ремень находится на шкиве.
Д0 =m·z (4.9)
Минимальное число зубьев на шкиве zmin зависит от
модуля ремня: при m = 2 - 4 мм zmin = 16, при m = 5 мм zmin = 18.
Наружный и внутренний диаметры, а также шаг впадин шкива Pш = Рр (рис. 4.2, б) находят из выражений
Дн = Д0 - 2∆ (4.10)
Двн = Дн - 2·(h) (4.11)
Рш = (π·Дн ) /z= Рр-2πΔ /z (4.12)
, (4.13)
где δ – угловой шаг впадин шкива.
Радиус округлений зубьев у головки и ножки шкива R = 0,25·m. Ширину основания впадины у шкива S’ш рассчитывают с учетом бокового f = 0,35·m и радиального е ≥ 3·m зазоров, при этом S’ = S - 2·е tgγ +f / cosγ. Передачи с гибкой связью с зацеплением выполняются также и с перфорированной лентой. В таких передачах зубчатые барабаны 1 соединены гибкой 2 перфорированной лентой (рис. 4. 3), которую изготавливают чаще всего из стали.
Минимальный радиус r барабана связан с толщиной δ стальной ленты зависимостью г = 120·δ. Передача с перфорированной лентой широко применяется в принтерах персональных компьютеров.
Передаточное отношение для зубоременных передач и передач с перфорированной лентой определяется выражением (1), где под Д1 и Д2 – понимают диаметры начальных окружностей.
Рис. 4.3. Передача с перфорированной лентой (а) и лобовой вариатор (б)
При последовательном соединении n-фрикционных механизмов передаточное отношение i1nравно произведению передаточных отношений отдельных механизмов.
i1n= i12× i43×i65 … in-1,n(4.14)
Если при последовательном соединении фрикционных механизмов диаметры дисков равны D1, D2,… Dn, то передаточное отношение i1nопределяется выражением
i1n = ξn∙ D2/D1∙D4/D3…Dn/Dn-1 (4.15)
Для лобового вариатора (рис. 1, б), при перемещении ролика 2, меняется передаточное отношение i12. Один из его основных параметров диапазон регулирования.
Д = =D2max/D2min, (4.16)
Диапазон регулирования лобового вариатора может изменяться в широких пределах.
Следует учитывать, что фрикционные механизмы с гибкой связью применяются для передачи вращения между валом при больших межосевых расстояниях и для преобразования вращательного движения в прямолинейное, и наоборот. Для передачи вращения (рис. 4.1, в) фрикционные механизмы имеют передаточное число 7÷10, обладают плавным ходом, демпфируют и сглаживают колебания крутящего момента, имеют низкую стоимость, не нуждаются в смазке и работают в широком температурном интервале от – 40 до + 80 °С. Эти особенности обусловливают широкое применение ременных передач в системах автоматики и в персональных компьютерах, приводах магнитофонов и видеомагнитофонов.
Кроме ременной передачи различают механизмы с непосредственными соединениями, когда гибкая связь 3 закреплена каким - либо способом на барабанах или шкивах; (рис. 4.4).
Для фрикционных передач с непосредственными соединениями в качестве гибких связей применяются гибкие стальные тросики: диаметром d = 0,6 - 1,02 мм; капроновые d = 0,3 - 0,8 мм и специальные для радиоприемников d = 0,8 - 1,3 мм или гибкие стальные ленты, для которых применяются высокоуглеродистые и пружинные стали толщиной 0,1; 0,12; 0,15; 0,18; 0,2; 0,22; 0,25; 0,28; 0,3 мм и шириной 4 - 30 мм. Предел прочности при растяжении таких лент 735 - 1175 МПа.
На рис. 4. 4 приведены схемы передач гибкой связью с непосредственными соединениями. Для передачи преобразующей линейное перемещение гибкой связи 3 во вращательное движение ролика 1 (рис. 4.4, а). уравнение движения имеет вид
φ1 = 180 / π×(2×l /Д + h), (4.17)
где φ1 – угол поворота ролика;
l – поступательное перемещение гибкой связи,
Д – диаметр ролика;
h – толщина или диаметр тросика
Для передачи (рис. 4.4, в) уравнение движения задается формулой
φ2 = φ1×(Д 1 + h) / (Д2 + h) (4.18)
Рис. 4.4. Схемы передач с гибкой связью
Передачи с гибкой связью могут работать как на ускорение, так и на замедление с i12 до 3:1 или 1:3. Необходимым условием работы передачи с гибкой связью является силовое или кинематическое замыкание. Силовое замыкание передач с одной ветвью чаще всего осуществляется с мощью пружин связанных с ведомым звеном.
В кинематических замкнутых передачах натяжение гибкой связи производится пружиной (рис. 4.4, а, в), натяжным роликом (рис. 4.4, г) или винтовой стяжкой (рис. 4.4, д). Шкивы и ролики для передач с гибкими тросиками выполняются с одной круговой и несколькими спиральными канавками. Профиль канавки шкива для увеличения трения обычно делают клиновидным (рис. 4.4, а). Ролики для передач с гибкой лентой выполняют в прямоугольной канавке (рис. 4.4 б). Иногда вместо двух дисков в фрикционной передаче используют три диска (рис. 4.4, е), повышая точность настройки.
Такие виды передач получили широкое применение в конструкциях современных аналово-цифровых приемников в качестве настройки на заданную частоту радиостанции.
4.2. Геометрия цилиндрической зубчатой передачи
В механизмах РЭС наиболее распространены эвольвентные зубчатые передачи /4/. Меньшее зубчатое колесо ( ) называют шестерней, а большое ( ) – колесом. Зацепление зубчатых колес и кинематически можно представить как качение без скольжения двух окружностей диаметрами и называемых начальными , для передач без смещения они совпадают с делительными и (рис. 4.4).
Положение линии зацепления, т.е. траектории общей точки контакта зубьев при ее движении относительно неподвижного звена зубчатой передачи, определяется углом зацепления (ГОСТ 16530-70). Окружность зубчатого колеса, делящуюся при его нарезании на равное число частей длинной P, называемых шагами и имеющую стандартный модуль, называют делительной. Диаметр такой окружности находят из равенства
, (4.19)
где m - модуль зубчатого зацепления.
Модуль m является основной характеристикой
зубчатого колеса и равен
(4.20)
Зубчатые колеса с модулем 0.1 мм 1мм называют мелкомодульными. Для снижения номенклатуры и унификации режущего и измерительного инструментов модули стандартизированы и выбираются из табл. 4.1. Первый ряд следует предпочитать второму.
Рис. 4.5. Схема зацепления двух зубчатых колес
У передачи, которая состоит из зубчатых колес и изготовленных без смещения, начальные и делительные окружности совпадают:
Высота зуба берется равной . При , , где - коэффициент высоты головки, - коэффициент радиального зазора (по ГОСТ 16532-70, значения
и ). Диаметры вершин зубьев равны:
(4.23)
, (4.24)
диаметры впадин: определяются выражениями
(4.25)
. (4.26)
Межосевое расстояние зубчатой пары: равно
. (4.27)
Исходный контур инструментальной рейки, используемый при нарезании зубчатых колес имеет угол профиля aw = 200. Ширина венца зубчатого колеса определяется произведением межосевого расстояния на соответствующий коэффициент ширины зубчатого венца ; . Выбор осуществляется из табл. 4.2.
Таблица 4.2
Значения
Применение
0.01 0.1
Кинематические и легконагруженные передачи
0.1 0.25
Легко и средненагруженные передачи при повышенной жесткости валов
0.25 0.40
Передачи повышенной и высокой нагруженности при достаточной жесткости валов
При увеличении коэффициента ширины зубчатого венца для обеспечения контакта по всей длине зуба необходимо повышать жесткость и точность изготовления зубчатых колес.
4.3. Конические зубчатые передачи
В конических передачах начальные и делительные
Конусы зубчатых колес и сопровождаются по своим образующим и перекатываются друг по другу без скольжения. Вершины конусов находятся в точке пересечения осей этих колес (рис. 4.6). Зубчатый венец ограничивает внешний и внутренний торцы колеса, а сама передача имеет межосевой угол и углы образующих начальных конусов и . Размеры зубчатых колес обозначают по их внешнему торцу (индекс C) и среднему сечению (индекс m).
Рис. 4.6. Схема конической передачи и геометрия конического зубчатого колеса
В соответствии ГОСТ 198824-74 зубчатые колеса без смещения при прямом зубе и торцевом модуле для имеют следующие параметры:
внешнее конусное расстояние ; среднее конусное расстояние ;
ширина зубчатого венца ;
углы делительные конусов ; ;
внешний делительный диаметр ; ;
внешний диаметр вершин ;
, где ; ;
внешняя высота зуба , где =0.2; расчетное расстояние .
Передаточное число в конической передаче . Погрешности зубчатых колес зависят от точности их изготовления.
4.4. Геометрия червячной передачи
Червячные передачи работают по принципу работы винтовой пары. Как правило, ведущим звеном является червяк, а ведомым – колесо. В червячной передаче с архимедовым червяком различают начальные диаметры и ; делительные диаметры червяка 1 и колеса 2 и и шаг P связанный с модулем зацепления в основном сечении червяка m соотношением (рис. 4.7).Резьба червяка может быть однозаходной и многозаходной, число витков червяка равно , число зубьев колеса - . Модули предпочтительного ряда в осевом сечении червяка должны выбираться из ряда:0.1; 0.125; 0.16; 0.2; 0.25; 0.315; 0.4; 0.5; 0.63; 0.8; 1.0; 1.25; 1.6; 2.0; 2.5; 3.15; 4.0; 5.0 и т.д.; допускается использование модулей 0.12; 0.15; 0.3; 0.6; 1.5; 3.0; 3.5; 4.5; 5.5 и т.д.
Рекомендуются следующие коэффициенты диаметра червяка (ряд 1): 6.3; 8.0; 10; 12.5; 16; 20; 25. Некоторые сочетания и по ГОСТ 2144-76 даны в табл. 4.3. Делительный (начальный) диаметр , диаметры вершин и впадин витков при ; , при =0.2 выражение в виде:
(4. 28)
(4. 29)
. (4. 30)
Таблица 4.3
Значения для выбора параметра
1.0
1.6
10; 12.5; 16; 20
1; 2; 4
1.25
12.5; 16; 20
1; 2; 4
2.0; 2.5; 3.15
8; 10; 12.5; 16; 20
1; 2; 4
Рис. 4.7. Геометрические параметры червячной передачи
Длина нарезанной части червяка:
при
при .
Угол обхвата витков червяка колесом , угол зацепления . При этом
(4. 31)
(4. 32)
(4. 33)
(4.34)
При , ; при , ; при , .
Ширину венца находят в соответствии с углом обхвата червяка колесом . Делительный угол подъема винтовой линии вычисляют из выражения:
. (4. 35)
Межосевое расстояние в червячной передаче без смещения:
. (4. 36)
Геометрические расчеты червячных передач во многом аналогичны расчетам зубчатых механизмов.
4.5. Передача винт-гайка
В передаче винт-гайка используют в основном трапецеидальную резьбу (рис. 4.8,.а) и лишь в отдельных случаях – метрическую (рис. 4.8, б). Резьба имеет наружный , внутренний и средний диаметры ( относится к винту, - к гайке), шаг , теоретическую высоту H и рабочую высоту профиля связаны H1 , угол профиля , угол подъема резьбы , число заходов , ход резьбы .
Рис. 4.8. Трапецеидальная (а) и метрическая (б) резьба
Для трапецеидальной резьбы в стандартах определены профиль и основные ее размеры. У этой резьбы , ; , мм, =1.5 мм.
Для метрической резьбы эти параметры даны в СТ СЭВ 640-77, угол профиля резьбы , шаг и высота профиля H. Теоретическая высота H и рабочая высота профиля связаны H1 = 5/8 H = 0,541 P для винта и для гайки соответственно H/8 и H/4.
Стандарт предусматривает для одного номинального диаметра резьбу с крупными и мелкими шагами (табл. 4.4).Резьбы с мелким шагом используют в соединениях, испытывающих вибрационные нагрузки, что обеспечивает лучшее самоторможение. Обозначение основной резьбы с указанием допуска имеют вид: для болтов M12-6q; для гаек M12-6H, для болтового соединения M12-6H/6q (для 6-й степени точности).
4.6. Механизмы прерывистого движения
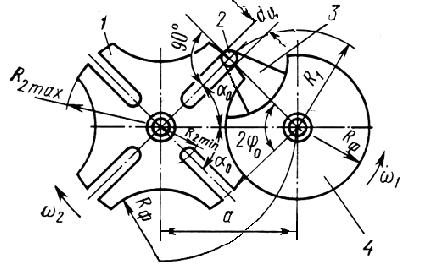
Рассмотрим геометрические параметры мальтийского механизма с внешним зацеплением и четырехпазовым крестом (рис. 4.9).
Таблица 4.4
Параметры метрической резьбы
Номиналь-ный диаметр
(1- ряд), мм
Шаг резьбы ,мм
Номи-нальный
диаметр (1-ряд), мм
Шаг резьбы ,мм
Круп-ный
Мел-кий
Круп-ный
Мелкий
0.25
0.2
1.5
1.25; 1.0; 0.75; 0.5
1.2
0.25
0.2
1.5
1.25; 1.0; 0.75; 0.5
1.6
0.35
0.2
1.75
1.5; 1.25; 1.0; 0.75; 0.5
0.4
0.25
1.75
1.5; 1.25; 1.0; 0.75; 0.5
2.5
0.45
0.35
1.5; 0.75; 0.5
0.5
0.35
2.5
2.0; 1.5; 1.0; 0.75; 0.5
0.7
0.5
2.0; 1.5; 1.0; 0.75
0.8
0.5
3.5
2.0; 1.5; 1.0; 0.75
1.0
0.75; 0.5
3.0; 2.0; 1.5; 1.0
1.25
1.0; 0.75; 0.5
4.5
3.0; 2.0; 1.5; 1.0
Его геометрическими параметрами являются межосевые расстояния , радиус кривошипа , радиус фиксатора , число пазов креста , угол между пазами креста , угол поворота кривошипа при повороте креста угол (рабочий угол кривошипа) и расчетные радиусы креста и .
Угол между пазами креста равен 2a0 = 2p /z, где =3-12.
Радиусы креста равны и R2max = A cos(p /z). Диаметр цевки кривошипа и ширина пазов креста связаны . Условием безударного зацепления цевки с пазами креста является зависимость .
Рис. 4.9. Геометрия мальтийского механизма
Кинематическими параметрами механизма являются период цикла , коэффициент цикла движения и наибольшая угловая частота креста . Период цикла механизма соответствует времени одного оборота кривошипа и равен сумме времени движения креста и времени его покоя :
, (4.38)
где - частота вращения кривошипа об/мин.
Коэффициент цикла движения равен x=tq/Tц=j0/p. Наибольшая угловая частота креста определяется выражением
. (4.39)
Динамические параметры механизма характеризуются ускорениями движения креста, значения которых в начальный и конечный моменты движения равны
. (4.40)
Ускорение уменьшается при увеличении числа пазов креста. Остановка механизма при выходе цевки из паза осуществляется секторным замком, выпуклая цилиндрическая поверхность которого входит в вогнутую поверхность креста и препятствует его повороту.
Основные параметры геометрии других механизмов прерывистого движения приведены на рис 4.10. Преимуществом секторного зубчатого механизма прерывистого движения по сравнению с мальтийским является возможность расширения характеристики цикла t = tд/tп, а его недостатком- наличие жесткого удара при входе в зацепление. Для предотвращения самопроизвольного поворота ведомого колеса в период его покоя используются фиксирующие устройства. Зубчатые механизмы прерывистого движения применяют в устройствах дискретной цифровой техники и в ограничителях движения.
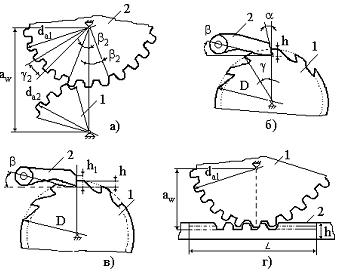
Если неполное число зубьев на ведущем колесе 1 (рис. 4.10 а) обозначить через Z11при полном числе зубьев Z1,а число зубьев на ведомом колесе Z2, то угол поворота колеса 2 за один полный оборот колеса 1при g2=2×p /Z2 равен
Число k можно получить делением двойного угла 2b2, охватывающего дугу зацепления, на угловой шагg2, т.е k равно целому числу при делении 2b на g2. Угол b2 для передач без коррекции зубьев при rа1=dа1/2. rа2=dа2/2 определяют из выражения
Рис. 4.10. Геометрические характеристики секторной зубчатой передачи (а), храпового механизма (б, в) и реечной передачи (г)
Храповые механизмы, получившие применение в конструкциях современных электронно- механических часов, используют для преобразования вращательного движения во вращательное с остановками Конструктивно такие механизмы содержат храповое колесо 1 и собачку 2, а основной характеристикой зацепления храпового колеса является модуль
m = P /p= D / Z, (4.43)
где D – наружный диаметр храпового колеса.
Число зубьев храпового колеса определяется наименьшим углом его поворота g.за один ход собачки
Z = 2p / g.(4.44)
Число зубьев на храповом колесе Z=8-48, однако предпочтительное Z=12 –20 .Число зубьев можно уменьшить, используя две или три собачки. Собачки обычно прижимаются к храповому колесу с помощью пружин. Профиль зуба у колеса может быть с поднутрением (рис 4.9 б) или без него(рис. 4.9 в). Угол поднутрения a составляет обычно a=10 –150и улучшает стопорение колеса. Угол b = 10 –120улучшает надежность зацепления. Высота зуба h = m, высота опорной части собачки h1 = 1.2 m. Длину зуба храпового колеса выбирают, исходя из допустимой удельной нагрузки [q]
b = Ft /[q] (4. 45)
Материал храпового колеса и собачки – термически обработанная сталь марок 20Х, 12ХН3, 40ХН.
При твердости НВ=280 –350 МПа величина [q] равна [q] £ 250 МПа, при твердости НВ=400 –500 МПа,[q] £ 400 МПа. Окружная сила, действующая на собачку и зуб храпового колеса
Ft = 2×T1×Kд /D (4. 46)
Для реечной передачи расчет геометрии зубчатого колеса производят как для обычного зубчатого зацепления, определяя делительный диаметр , диаметр впадин, диаметр выступов.
Затем рассчитывают длину рейки L реечной передачи
L = m×p× Z, (4. 47)
где Z– число зубьев рейки, m – модуль зубчатого зацепления.
Межосевое расстояние awв реечной передачи выбирают из соотношения
aw = d1 /2 + m /2 , (4. 48)
При этом высота рейки h, выбирается конструктивно и равна h=5-10мм, d1 – делительный диаметр колеса, определяемый выражением (4. 39), .m – модуль зубчатого зацепления
Контрольные вопросы
1. Что включает расчет геометрии фрикционных передач?
2. Каким образом определяется диапазон регулирования
лобового вариатора?
3. Как определяются межосевое расстояние, угол обхвата
и длина ремня для фрикционной передачи с гибкой связью?
4. Чем определяется угол поворота ролика для фрикцион-
ных передач, в которых силовое замыкание осуществляется с помощью пружин?
5. От чего зависит высота зуба в зубчатой передаче?
6. Каким образом определяется делительные диаметры,
диаметры выступов и впадин, межосевое расстояние для зубчатых механизмов?
7. Что такое модуль зубчатых механизмов и как он
выбирается?
8. Какие зубчатые колеса относят к мелкомодульным?
9. Чему равна ширина зубчатого венца и от чего она зави-
сит для зубчатых колес?
10. Как определяются геометрические характеристики
конической зубчатой передачи?
11. Каким образом определяется делительный диаметр,
диаметр вершин и впадин червяка?
12. Что входит в расчет геометрии червячного колеса?
13. Каким образом определяется длина нарезной части
червяка и угол подъема его винтовой линии?
14. Что относится к геометрическим характеристикам
мальтийского механизма?
15. Какими параметрами характеризуется трапецеидальная
метрическая резьбы в механизме винт-гайка и их основные
размеры?
16. Чему равны угловая скорость и угловое ускорение
мальтийского креста и как они связаны с геометрией мальтийского механизма?
17. От чего зависят радиусы креста и ширина его пазов для
мальтийского механизма?
18. Чем характеризуется расчет геометрии секторной
зубчатой передачи?
19. Как определяется число зубьев и модуль храпового
колеса ?
20. Что относится к геометрическим параметрам храпово-
го механизма?
21. Каким может быть профиль зуба храпового колеса
и от чего зависит его высота в храповом механизме?

 и
и  , межосевого расстояния, равного а w= 0.5 ((Д1 + Д2).
, межосевого расстояния, равного а w= 0.5 ((Д1 + Д2). , определяют
, определяют  , где
, где  - передаточное число.
- передаточное число.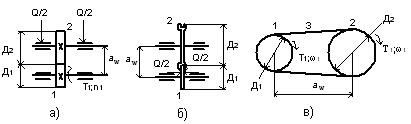
 (мм) для передач с резинотканевыми ремнями равны /3/:
(мм) для передач с резинотканевыми ремнями равны /3/: , (4.1)
, (4.1) - вращающий момент на валу малого шкива (н.м.).
- вращающий момент на валу малого шкива (н.м.). - крутящий момент на ведущем валу (н.м.).
- крутящий момент на ведущем валу (н.м.). , а вычисленные значения округляют до ближайших стандартных значений: 30; 45; 50; 56; 63; 71; 80; 90; 100; 112; 125; 140; 160; 180; 200 и т.д. Межосевое расстояние аw определяется конструктивными требованиями к ременному приводу и для плоскоременных передач:
, а вычисленные значения округляют до ближайших стандартных значений: 30; 45; 50; 56; 63; 71; 80; 90; 100; 112; 125; 140; 160; 180; 200 и т.д. Межосевое расстояние аw определяется конструктивными требованиями к ременному приводу и для плоскоременных передач: U=1, C=1.2; для U=2, C=1.0, если U=3, C=0.95; для U=4, C=0.9, если U=5 и C=0.35; для U>6.
U=1, C=1.2; для U=2, C=1.0, если U=3, C=0.95; для U=4, C=0.9, если U=5 и C=0.35; для U>6. зависит от тяговой способности и составляет для передач с резинотканевыми и синтетическими ремнями a1 >1500 и клиноременных a1 >1200. По этому габариты клиноременных передач существенно меньше.
зависит от тяговой способности и составляет для передач с резинотканевыми и синтетическими ремнями a1 >1500 и клиноременных a1 >1200. По этому габариты клиноременных передач существенно меньше.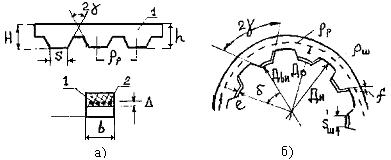
 , (4.13)
, (4.13)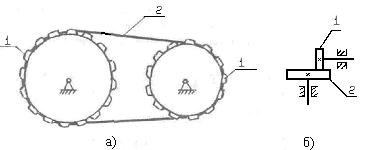
 =D2max/D2min, (4.16)
=D2max/D2min, (4.16)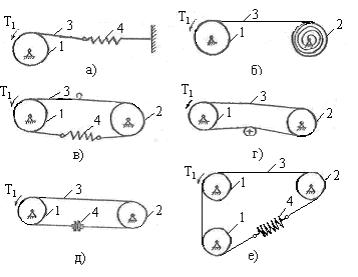
 ) называют шестерней, а большое (
) называют шестерней, а большое (  ) – колесом. Зацепление зубчатых колес
) – колесом. Зацепление зубчатых колес  и
и  называемых начальными , для передач без смещения они совпадают с делительными
называемых начальными , для передач без смещения они совпадают с делительными  и
и  (рис. 4.4).
(рис. 4.4). (ГОСТ 16530-70). Окружность зубчатого колеса, делящуюся при его нарезании на равное число частей длинной P, называемых шагами и имеющую стандартный модуль, называют делительной. Диаметр такой окружности находят из равенства
(ГОСТ 16530-70). Окружность зубчатого колеса, делящуюся при его нарезании на равное число частей длинной P, называемых шагами и имеющую стандартный модуль, называют делительной. Диаметр такой окружности находят из равенства , (4.19)
, (4.19) (4.20)
(4.20) 1мм называют мелкомодульными. Для снижения номенклатуры и унификации режущего и измерительного инструментов модули стандартизированы и выбираются из табл. 4.1. Первый ряд следует предпочитать второму.
1мм называют мелкомодульными. Для снижения номенклатуры и унификации режущего и измерительного инструментов модули стандартизированы и выбираются из табл. 4.1. Первый ряд следует предпочитать второму.
 окружности совпадают:
окружности совпадают: (4.21)
(4.21) (4.22)
(4.22) . При
. При  ,
,  , где
, где  - коэффициент высоты головки,
- коэффициент высоты головки,  - коэффициент радиального зазора (по ГОСТ 16532-70, значения
- коэффициент радиального зазора (по ГОСТ 16532-70, значения и
и  ). Диаметры вершин зубьев равны:
). Диаметры вершин зубьев равны: (4.23)
(4.23) , (4.24)
, (4.24) (4.25)
(4.25) . (4.26)
. (4.26) . (4.27)
. (4.27) определяется произведением межосевого расстояния
определяется произведением межосевого расстояния  ;
;  . Выбор
. Выбор  осуществляется из табл. 4.2.
осуществляется из табл. 4.2. 0.1
0.1
 и
и  сопровождаются по своим образующим и перекатываются друг по другу без скольжения. Вершины конусов находятся в точке пересечения осей этих колес (рис. 4.6). Зубчатый венец ограничивает внешний и внутренний торцы колеса, а сама передача имеет межосевой угол
сопровождаются по своим образующим и перекатываются друг по другу без скольжения. Вершины конусов находятся в точке пересечения осей этих колес (рис. 4.6). Зубчатый венец ограничивает внешний и внутренний торцы колеса, а сама передача имеет межосевой угол  и углы образующих начальных конусов
и углы образующих начальных конусов  и
и  . Размеры зубчатых колес обозначают по их внешнему торцу (индекс C) и среднему сечению (индекс m).
. Размеры зубчатых колес обозначают по их внешнему торцу (индекс C) и среднему сечению (индекс m).
 для
для  имеют следующие параметры:
имеют следующие параметры: ; среднее конусное расстояние
; среднее конусное расстояние  ;
; ;
; ;
;  ;
; ;
;  ;
; ;
; , где
, где  ;
;  ;
; , где
, где  =0.2; расчетное расстояние
=0.2; расчетное расстояние  .
. . Погрешности зубчатых колес зависят от точности их изготовления.
. Погрешности зубчатых колес зависят от точности их изготовления. (рис. 4.7).Резьба червяка может быть однозаходной и многозаходной, число витков червяка равно
(рис. 4.7).Резьба червяка может быть однозаходной и многозаходной, число витков червяка равно  (ряд 1): 6.3; 8.0; 10; 12.5; 16; 20; 25. Некоторые сочетания
(ряд 1): 6.3; 8.0; 10; 12.5; 16; 20; 25. Некоторые сочетания  и
и  и впадин
и впадин  витков при
витков при  ;
;  , при
, при  =0.2 выражение в виде:
=0.2 выражение в виде: (4. 28)
(4. 28) (4. 29)
(4. 29) . (4. 30)
. (4. 30)





 при
при 
 при
при  .
. , угол зацепления
, угол зацепления  . При этом
. При этом (4. 31)
(4. 31) (4. 32)
(4. 32) (4. 33)
(4. 33) (4.34)
(4.34) ,
,  ; при
; при  ,
,  ; при
; при  ,
,  .
. находят в соответствии с углом обхвата червяка колесом
находят в соответствии с углом обхвата червяка колесом 
 . Делительный угол подъема винтовой линии вычисляют из выражения:
. Делительный угол подъема винтовой линии вычисляют из выражения: . (4. 35)
. (4. 35) . (4. 36)
. (4. 36) , внутренний
, внутренний  и средний
и средний  диаметры (
диаметры (  - к гайке), шаг
- к гайке), шаг  , теоретическую высоту H и рабочую высоту профиля связаны H1 , угол профиля
, теоретическую высоту H и рабочую высоту профиля связаны H1 , угол профиля  , угол подъема резьбы
, угол подъема резьбы  , число заходов
, число заходов  .
.
 ,
,  ;
;  ,
,  мм,
мм,  =1.5 мм.
=1.5 мм. , шаг
, шаг  и высота профиля H. Теоретическая высота H и рабочая высота профиля связаны H1 = 5/8 H = 0,541 P для винта и для гайки соответственно H/8 и H/4.
и высота профиля H. Теоретическая высота H и рабочая высота профиля связаны H1 = 5/8 H = 0,541 P для винта и для гайки соответственно H/8 и H/4. , радиус кривошипа
, радиус кривошипа  , радиус фиксатора
, радиус фиксатора  , число пазов креста
, число пазов креста  , угол поворота кривошипа
, угол поворота кривошипа  при повороте креста угол
при повороте креста угол  и
и  .
. . (4. 37)
. (4. 37) и R2max = A cos(p /z). Диаметр цевки кривошипа и ширина пазов креста связаны
и R2max = A cos(p /z). Диаметр цевки кривошипа и ширина пазов креста связаны  . Условием безударного зацепления цевки с пазами креста является зависимость
. Условием безударного зацепления цевки с пазами креста является зависимость  .
.
 , коэффициент цикла движения
, коэффициент цикла движения  и наибольшая угловая частота креста
и наибольшая угловая частота креста  . Период цикла механизма соответствует времени одного оборота кривошипа и равен сумме времени движения креста
. Период цикла механизма соответствует времени одного оборота кривошипа и равен сумме времени движения креста  и времени его покоя
и времени его покоя  :
: , (4.38)
, (4.38) - частота вращения кривошипа об/мин.
- частота вращения кривошипа об/мин. . (4.39)
. (4.39) . (4.40)
. (4.40)