Аналитические методы исследования кинематики механизмов позволяет определить функциональные зависимости между параметрами движения входных и выходных звеньев.
Кинематический расчет включает определение функции положения и передаточных характеристик механизма. Функцией положения называют зависимость между координатами y и соответственно входного и выходного звеньев.
(3.1)
Функция положения – математическое выражение геометрических связей в механизме, обусловливающих определенное преобразование движения. Дифференцируя выражение (3.1) получаем скорость и ускорение выходных звеньев
(3.2)
(3.3)
Входящие в выражения (3.2) и (3.3) производные и называются первой и второй передаточными функциями или аналогами скорости и ускорения. Они как и функция положения (3.1) выражают только структурные и геометрические связи механизма, т.е. зависят от положения входного звена. Рассмотрим функции положения отдельных механизмов и их передаточные характеристики и . Для кулачкового механизма с качающим толкателем (рис.2.2 б) функция положения равна
, (3.4)
где - угол поворота, равный , - постоянная.
Передаточные функции равны
(3.5)
(3.6)
Для синусного механизма кинематические характеристики имеют вид:
y ( ) = r×sin j (3.7)
- угол поворота
(3.8)
(3.9)
В случае тангенсного механизма эти характеристики имеют вид
(3.10)
- угол поворота
(3.11)
(3.12)
Для кривошипно-ползунного механизма функция положения и первая передаточная характеристика имеют вид
(3.13)
(3.14)
Вторая передаточная функция представляет производную от для такого механизма:
(3.15)
Для большинства рычажных и кулачковых механизмов функции положения и передаточные характеристики являются нелинейными функциями, поэтому эти механизмы используют в качестве исполнительных. Для цилиндрических зубчатых передач и фрикционных механизмов функция положения и передаточные характеристики и являются наоборот линейными функциями. Поэтому эти механизмы используются часто в промежуточных звеньях и выступают в качестве передаточных механизмов. Для фрикционных и зубчатых механизмов функция положения равна
(3.16)
- постоянные; где - угол поворота, равный .
Первая и вторая передаточная функции равны
(3.17)
(3.18)
Кинематический расчет таких механизмов включает определение передаточного отношения и нахождения передаточного числа .
Для фрикционных передач передаточное отношение с учетом упругого скольжения равно
, (3.19)
где и - диаметры ведущего и ведомого дисков;
и - угловые скорости вращения этих дисков;
- коэффициент, учитывающий скольжение и
зависящий от модуля упругости материала, шероховатости
поверхности, наличия смазки и условий эксплуатации.
В зубчатых передачах роль диаметров фрикционных катков играют делительные диаметры и , так называемых начальных окружностей, находящихся в зацеплении зубчатых колес.
Точки касания этих окружностей имеют одинаковую скорость .
Тогда передаточное отношение зубчатой передачи, состоящей из двух колес, равно:
, (3.20)
где знак минус относится к внешнему, а знак плюс – к внутреннему зацеплению; и - число зубьев второго и первого колес..
Для червячной передачи передаточное отношение равно /3/ равно делению числа зубьев червячного колеса на число заходов червяка
(3.21)
Таким же образом определяется передаточное отношение для конической и винтовой зубчатых передач, где - число зубьев ведомого колеса, - число зубьев ведущего колеса. Эти зубчатые механизмы изменяют плоскость вращения колес и передаточное отношение.
Рис. 3.1. Коническая (а), червячная (б) и винтовая (в) зубчатые передачи
В многоступенчатой цилиндрической зубчатой передаче с последовательным соединением зубчатых колес (рис. 3.2 а) передаточное отношение равно:
, (3.22)
где k- число пар сопряжения колес внешнего касания (зацепления); - число зубьев последнего n – го колеса; - число зубьев первого колеса.
Промежуточные колеса не влияют на величину передаточного отношения и получили название передаточных.
Назначение паразитных колес сводится к изменению направления вращения ведомого звена механизма, а также к уменьшению габаритов последнего при значительных межосевых расстояниях.
Для механизмов со ступенчатым соединением колес (рис. 3.2 б) на каждом промежуточном валу закреплено по два колеса, а на ведущем и ведомом валах – по одному.
Рис. 3.2. Последовательное (а), ступенчатое (б) соединения колес и смешанное с последовательным соединением
ступенчатой, конической и планетарной передач (в)
Передаточное отношение такого механизма с учетом того, что и определяется выражением:
(3.23)
Или в общем случае n – колес:
, (3.24)
где k – число пар сопряженных колес внешнего касания
(зацепления);
- число зубьев соответствующих колес.
Рассмотренное соединение колес позволяет реализовать большое передаточное отношение. При определении передаточного отношения планетарной передачи (рис.3.2 в) применим метод обращения движения (метод Виллиса), сообщим всей системе вращение с угловой скоростью минус ώн (ώн – угловая скорость водила Н). Тогда водило оказывается неподвижным, а передача превращается в соосный зубчатый механизм с неподвижными осями или обращенный механизм. Угловые скорости и исходного механизма: колесо 7 имеет угловую скорость ώ7, водило - ώн, колесо 9 ώ9= 0. Обращенный механизм имеет угловые скорости: колесо7 - ώ7 (н) = ώ7 - ώн , колесо 9 - ώ9 (н) = - ώн, водило ώн = 0. Причем верхний индекс в скобках указывает неподвижное звено. Передаточное отношение обращенного механизма от звена 7 к звену 9 равно
При расчете передаточного отношения -i79 (н) обращенного механизма с неподвижными в пространстве осями нужно учитывать знак передаточного отношения . Так как в рассматриваемой передаче одно зацепление внешнее, а другое внутреннее, то в соответствии с формулой (3.20) имеем
Таким образом, при последовательно соединенных механизмах передаточное отношение от ведущего звена к ведомому равно произведению передаточных отношений отдельных зубчатых передач. Следует отметить, что и при последовательном соединении нескольких планетарных передач, изображенных на рис 3.2 в, общее передаточное отношение равно произведению передаточных отношений отдельных планетарных механизмов.
Контрольные вопросы
1. Что понимают под кинематическими характеристиками механизмов?
2. Какой метод используется для определения
передаточного отношения планетарных передач и в чем его сущность?
3. От чего зависят фунция положения, первая и вторая
передаточная характеристики кривошипно- ползунного механизма?
4. Что такое передаточное отношение зубчатых
механизмов?
5. Каким образом определяется передаточное отношение
для последовательно соединенных зубчатых передач?
6. Чему равно передаточное отношение для ступенчатого

 y и
y и  соответственно входного и выходного звеньев.
соответственно входного и выходного звеньев. (3.1)
(3.1) (3.2)
(3.2) (3.3)
(3.3) и
и  называются первой и второй передаточными функциями или аналогами скорости и ускорения. Они как и функция положения (3.1) выражают только структурные и геометрические связи механизма, т.е. зависят от положения входного звена. Рассмотрим функции положения отдельных механизмов и их передаточные характеристики
называются первой и второй передаточными функциями или аналогами скорости и ускорения. Они как и функция положения (3.1) выражают только структурные и геометрические связи механизма, т.е. зависят от положения входного звена. Рассмотрим функции положения отдельных механизмов и их передаточные характеристики  , (3.4)
, (3.4) - угол поворота, равный
- угол поворота, равный  ,
,  - постоянная.
- постоянная. (3.5)
(3.5) (3.6)
(3.6) (3.8)
(3.8) (3.9)
(3.9) (3.10)
(3.10) (3.11)
(3.11) (3.12)
(3.12) и первая передаточная характеристика имеют вид
и первая передаточная характеристика имеют вид (3.13)
(3.13) (3.14)
(3.14) для такого механизма:
для такого механизма:
 (3.15)
(3.15) (3.16)
(3.16) - постоянные; где
- постоянные; где  (3.17)
(3.17) (3.18)
(3.18) и нахождения передаточного числа
и нахождения передаточного числа  .
. , (3.19)
, (3.19) и
и  - диаметры ведущего и ведомого дисков;
- диаметры ведущего и ведомого дисков; и
и  - угловые скорости вращения этих дисков;
- угловые скорости вращения этих дисков; - коэффициент, учитывающий скольжение и
- коэффициент, учитывающий скольжение и и
и  , так называемых начальных окружностей, находящихся в зацеплении зубчатых колес.
, так называемых начальных окружностей, находящихся в зацеплении зубчатых колес. .
. , (3.20)
, (3.20) и
и  - число зубьев второго и первого колес..
- число зубьев второго и первого колес.. равно /3/ равно делению числа зубьев червячного колеса
равно /3/ равно делению числа зубьев червячного колеса  (3.21)
(3.21)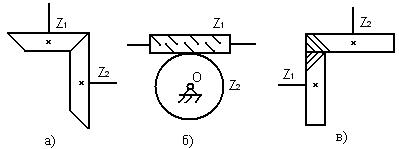
 , (3.22)
, (3.22) - число зубьев последнего n – го колеса;
- число зубьев последнего n – го колеса; 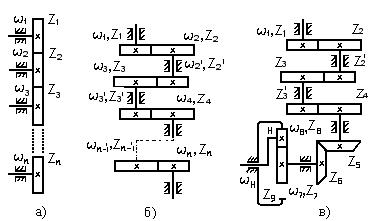
 и
и  определяется выражением:
определяется выражением: (3.23)
(3.23) , (3.24)
, (3.24) - число зубьев соответствующих колес.
- число зубьев соответствующих колес.