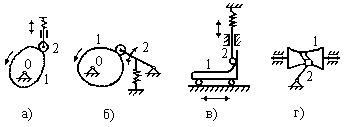
Исходя из кинематических, конструктивных и функциональных свойств, механизмы подразделяют на рычажные, кулачковые, фрикционные, зубчатые и механизмы прерывистого движения. Рычажными называют механизмы с геометрическим замыканием звеньев во вращательных и поступательных парах /1-5/. К рычажным механизмам относятся кривошипно-ползунный, кулисный, синусный, тангенсный, и пространственно-сферический (рис.2.1).
Рис. 2.1. Виды рычажных механизмов
Кривошипно-ползунный механизм, используемый для преобразования вращательного движения кривошипа 1 (рис. 2.1.а) в возвратно-поступательное движение ползуна 3. Ползун и кривошип соединяются с помощью звена 2, а сам ползун 3 совершает движение и оказывает давление на неподвижное звено 4. Кривошипно-кулисный механизм состоит из кривошипа 1 (рис. 2.1.б) и кулисы 3, представляющей собой подвижное направляющее звено, и звено 2, называемое кулисным камнем. Если , то вращательное движение кривошипа 1 преобразуется в возвратно-вращательное движение кулисы 3. Когда , то при равномерном вращении кривошипа 1 кулиса 3 вращается с переменной угловой скоростью. Для синусного механизма (рис. 2.1.в) при вращении кривошипа 1, точка А кривошипа двигается по окружности радиусом . Ползун 4 синусного механизма шарнирно соединен с кривошипом и может перемещаться по направляющей звена 2, которое в свою очередь, двигается в неподвижной прямолинейной направляющей 3. Любая точка звена 2 совершает возвратно-прямолинейное движение. Для тангенсного механизма (рис. 2.1 г) при движении кривошипа 1 ползун 3 совершает возвратно-поступательное движение. Пространственно-сферический механизм (рис. 2.1 .д) служит для передачи движения между пересекающимися осями под углом a, часто называемый карданной передачей. Кулачковые механизмы образуются путем силового замыкания звеньев кулачка 1 и толкателя (коромысла) 2. Кулачок обычно представляет собой диск или цилиндр, профиль которого очерчен определенной кривой, которая строго задает движение толкателю (рис. 2.2).
Рис. 2.2. Кулачковые механизмы
В зависимости от вида движения соединенное с кулачком звено называют толкателем (рис. 2.2 а, в). Механизмы используют для преобразования вращательного (рис. 2.2 а, б) или возвратно-поступательного движения (рис. 2.2 в) входного звена в возвратно-поступательное (рис. 2.2 а, в), угловое перемещение (рис 2.2 б) или для движения по сложнойпространственной траектории (рис. 2.2 г) выходного звена.
В фрикционных механизмах движение от ведущего звена к ведомому передается за счет сил трения, возникающих в результате контакта этих звеньев. Различают фрикционные передачи с жесткой связью (рис 2.3 а, б) и с гибкими связями (рис. 2.3 в).
Рис. 2.3. Фрикционные механизмы
Простейшая фрикционная передача состоит из двух цилиндрических дисков 1 и 2 (рис. 2.3 а), один из которых прижимается к другому силой упругости пружины, либо из трех дисков с торцевым зацеплением одного из них (рис. 2.3 б). Фрикционный механизм может быть выполнен и с гибкой связью (рис. 2.3 в) для передачи вращательного движения от одного диска к другому, находящемуся на большом расстоянии. Под гибкой связью понимают прямоугольные, клиновидные и круглые ремни, тросы, нити и ленты.
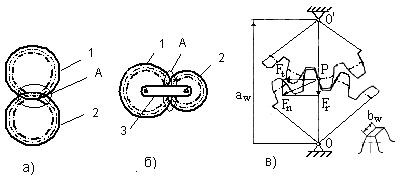
Зубчатыми называют механизмы, образованные зацеплением выступов или зубов, а передача нагрузки и движения между колесами осуществляется за счет воздействия зубьев друг на друга. В отличие от фрикционной передачи здесь исключено проскакивание звеньев.
Зубчатые механизмы состоят из двух колес (рис. 2.4 а) обеспечивающих внешнее зацепление или из двух колес 1 и 2 и дополнительного звена 3, получившего название водила (рис. 2.4 б), обеспечивающего планетарное движение колеса-сателлита 2. Передача, представленная на рис. 2.4 а, представляет простую зубчатую передачу, а на рис. 2.4 б – сложную планетарную зубчатую передачу. Возможны зубчатые механизмы с внутренним зацеплением колес и планетарные передачи, содержащие до трех колес-сателлитов. Планетарную передачу с гибким сателлитом называют волновой и движение в такой передаче передается за счет «бегущей волны» деформации гибкого колеса. К механизмам прерывистого движения относятся, мальтийский механизм, секторная зубчатая передача, реечная зубчатая передача и храповой механизм.
Рис. 2.4. Зубчатые механизмы (а, б) и вид зацепления (в) двух колес
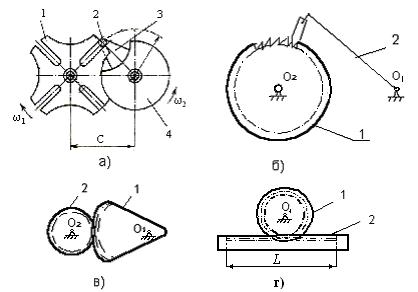
Мальтийские механизмы используют для преобразования непрерывного вращательного движения во вращательное движение с остановками. Такой механизм состоит из мальтийского креста 1 (рис. 2.5 а) и кривошипа 3 с цевкой 2 и фиксатором 4, где ведущим звеном является кривошип с цевкой. Секторный зубчатый механизм состоит ведущего неполнозубого 1 и ведомого полнозубого колеса 2 (рис. 2.5 б).
Храповые механизмы (рис.2.5 в) используют для преобразования вращательного движения во вращательное движение с остановками ведомого звена. Возможно также преобразование возвратно-поступательного движения во вращательное с остановками. Содержат зубчатое колесо 1 и собачку 2. К механизмам прерывистого движения относится реечная зубчатая передача, состоящая из зубчатого колеса 1 и рейки 2 (рис 2.5 г) и осуществляющее движение с остановками.
Рис. 2.5. Механизмы прерывистого движения
Реечный механизм служит для преобразования вращательного движения колеса в возвратно-поступательное перемещение рейки.
Данный механизм вместе с зубчатыми передачами и секторным механизмом получили широкое применение в конструкциях современных персональных компьютеров в качестве основных для обеспечения установки и возврата CD- и DVD-дисков и для дальнейшего считывания информации с этих дисков объемом памяти до 4 Гбайт.
Контрольные вопросы
1. Какие существуют основные виды механизмов?
Охарактеризуйте основные звенья рычажных,
кулачковых и фрикционных механизмов?
Какие существуют основные типы кулачковых
механизмов?
Чем определяются различные зубчатые механизмы и
какие звенья образуют кинематические пары?
Какие существуют основные виды механизмов РЭС
прерывистого движения?
В чем различие зубчатых механизмов прерывистого
движения от передаточных механизмов
Какие существуют основные типы рычажных
механизмов?
Для чего предназначены мальтийские механизмы и
какие звенья определяют структуру этих механизмов?
Охарактеризуйте назначение реечной передачи и ее
применение в современных конструкциях РЭС.
Какие существуют основные типы фрикционных
механизмов РЭС?
В чем различие простой и сложной зубчатых передач?


 , то вращательное движение кривошипа 1 преобразуется в возвратно-вращательное движение кулисы 3. Когда
, то вращательное движение кривошипа 1 преобразуется в возвратно-вращательное движение кулисы 3. Когда  , то при равномерном вращении кривошипа 1 кулиса 3 вращается с переменной угловой скоростью. Для синусного механизма (рис. 2.1.в) при вращении кривошипа 1, точка А кривошипа двигается по окружности радиусом
, то при равномерном вращении кривошипа 1 кулиса 3 вращается с переменной угловой скоростью. Для синусного механизма (рис. 2.1.в) при вращении кривошипа 1, точка А кривошипа двигается по окружности радиусом  . Ползун 4 синусного механизма шарнирно соединен с кривошипом и может перемещаться по направляющей звена 2, которое в свою очередь, двигается в неподвижной прямолинейной направляющей 3. Любая точка звена 2 совершает возвратно-прямолинейное движение. Для тангенсного механизма (рис. 2.1 г) при движении кривошипа 1 ползун 3 совершает возвратно-поступательное движение. Пространственно-сферический механизм (рис. 2.1 .д) служит для передачи движения между пересекающимися осями под углом a, часто называемый карданной передачей. Кулачковые механизмы образуются путем силового замыкания звеньев кулачка 1 и толкателя (коромысла) 2. Кулачок обычно представляет собой диск или цилиндр, профиль которого очерчен определенной кривой, которая строго задает движение толкателю (рис. 2.2).
. Ползун 4 синусного механизма шарнирно соединен с кривошипом и может перемещаться по направляющей звена 2, которое в свою очередь, двигается в неподвижной прямолинейной направляющей 3. Любая точка звена 2 совершает возвратно-прямолинейное движение. Для тангенсного механизма (рис. 2.1 г) при движении кривошипа 1 ползун 3 совершает возвратно-поступательное движение. Пространственно-сферический механизм (рис. 2.1 .д) служит для передачи движения между пересекающимися осями под углом a, часто называемый карданной передачей. Кулачковые механизмы образуются путем силового замыкания звеньев кулачка 1 и толкателя (коромысла) 2. Кулачок обычно представляет собой диск или цилиндр, профиль которого очерчен определенной кривой, которая строго задает движение толкателю (рис. 2.2).