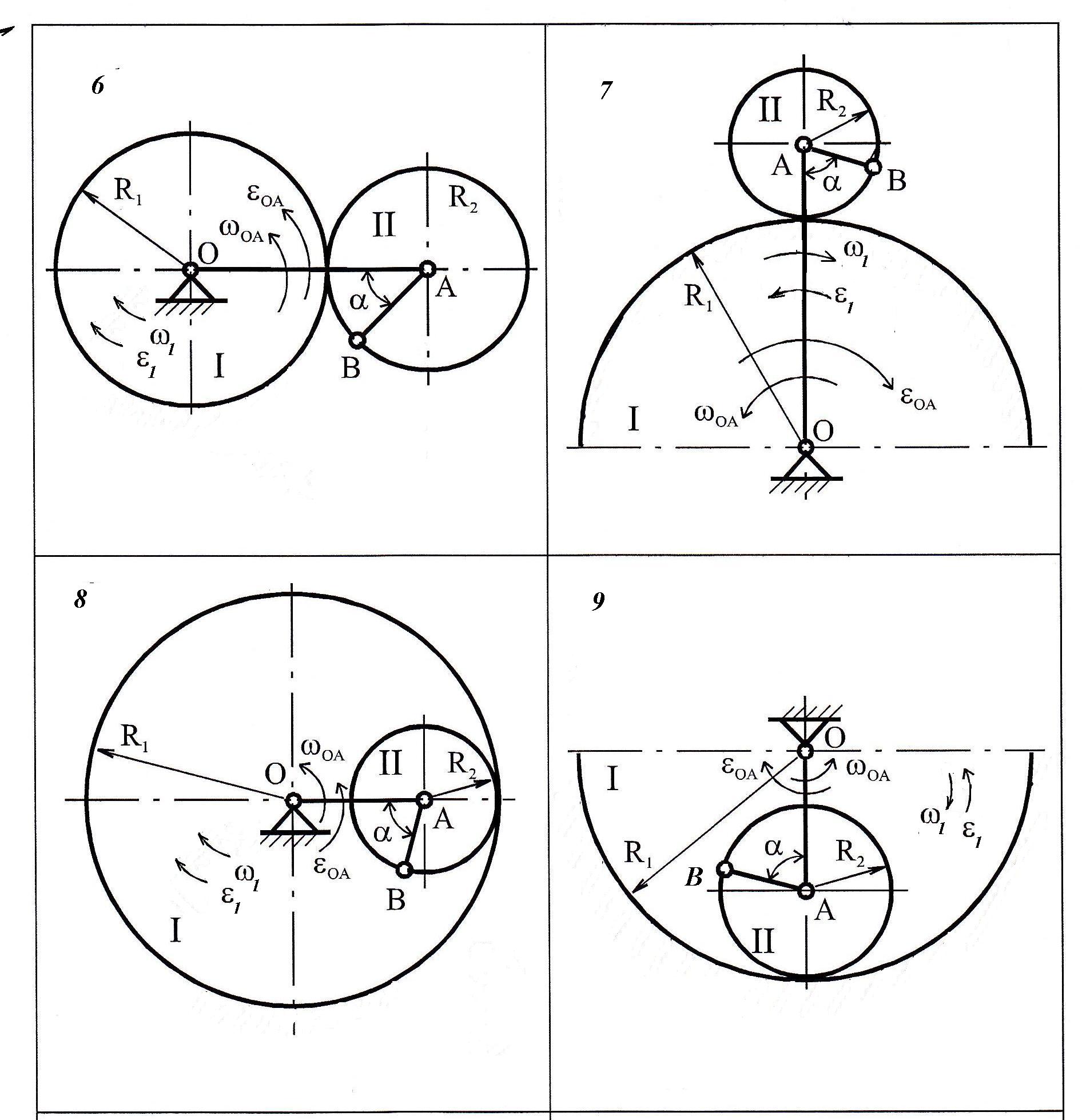
В дифференциальном механизме шестерня I радиуса R1 и кривошип ОА вращаются независимо друг от друга вокруг неподвижной оси О. Кривошип ОА приводит в движение свободно насаженную на его конец шестерню II радиуса R2. Для указанного на рисунке положения механизма найти скорости и ускорения точек А и В, если для момента времени, соответствующего указанному положению механизма, известны абсолютные величины угловой скорости и углового ускорения шестерни I ( ) и кривошипа ОА ( ). Варианты схем приведены на рисунках 9,10. Необходимые данные приведены в таблице 3.
Пример выполнения задания №3
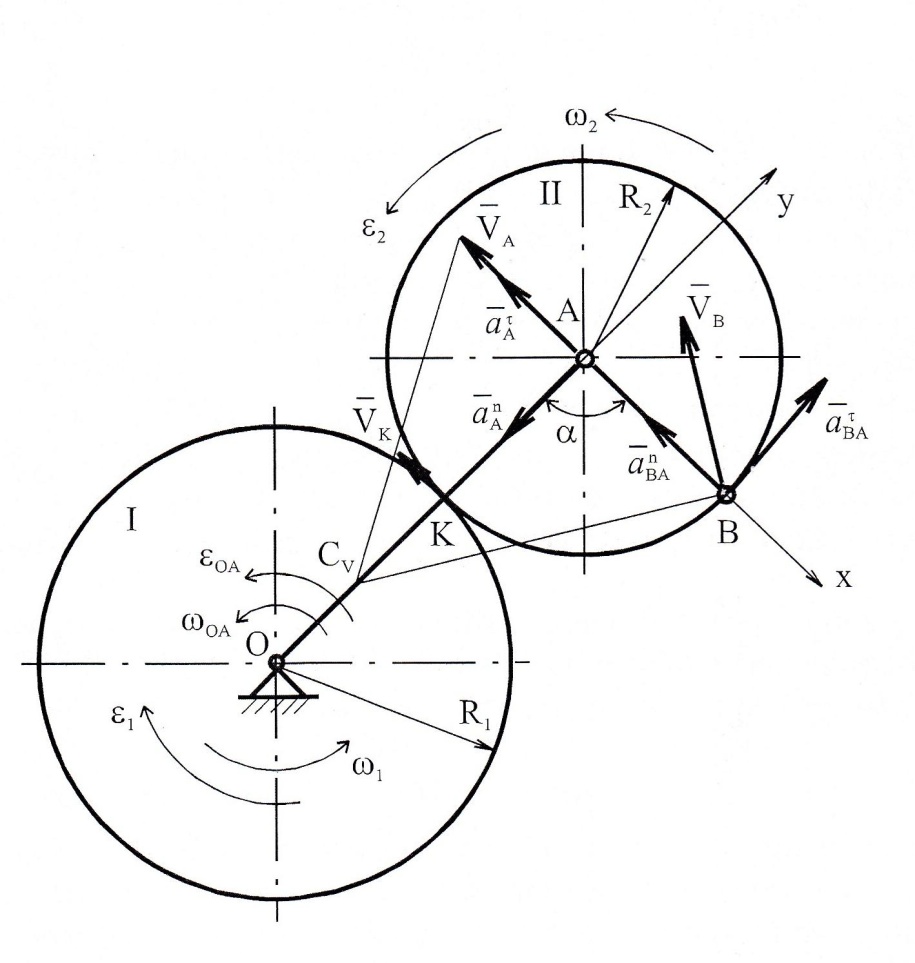
Дана кинематическая схема дифференциального механизма (рисунок 8);
Определить скорости и ускорения точек A и B, показанных на рисунке, если a= 90° .
Решение
Рассмотрим последовательно движение каждого из трех звеньев дифференциального механизма, начиная с одного из ведущих звеньев, то есть, начиная со звена, угловая скорость и угловое ускорение которого заданы.
1. Кривошип ОА совершает вращательное движение вокруг неподвижной оси, проходящей через точку O перпендикулярно плоскости рисунка. Определим скорость и ускорение точки A кривошипа, принадлежащей одновременно шестерне II. Величину скорости точки A ( ) определим по формуле
(1)
Для заданного положения механизма
(2)
Вектор скорости точки А (VA) направлен перпендикулярно радиусу вращения (ОА) в направлении вращения кривошипа, указанному на рисунке 4 дуговой стрелкой .
Ускорение точки A представим в виде геометрической суммы нормального и касательного ускорений
. (3)
Величины нормального ( ) и касательного ( ) ускорений определим
соответственно по формулам:
(4)
(5)
Для заданного положения механизма
(6)
(7)
Рисунок 8 – К примеру решения задания №3
ри этом нормальное ускорение точки А ( направлено по радиусу окружности, описываемой точки А, к центру этой окружности – к точке О, а касательное ускорение ( ) – по касательной к этой окружности, перпендикулярно ОА, в сторону, указанную дуговой стрелкой eOA .
Величина ускорения точки А в соответствии с (3) и с учетом (6) и (7) будет равна
2. Шестерня I совершает вращательное движение вокруг той же оси, что и кривошип ОА.
Определим величину скорости точки К касания двух шестерен ( )
= w1∙ . (8)
Дл указанного положения механизма =1∙ 0,2= 0,2 м/с.
Вектор скорости точки К ( ) направлен перпендикулярно радиусу вращения ) в направлении вращения шестерни I, указанном на рисунке 8 дуговой стрелкой w1.
3.Шестерня IIсовершает плоскопараллельное движение (плоское) движение. Для момента времени, соответствующего заданному положению механизма, выше определены скорости двух точек этой шестерни ( точек А и К), а также ускорение точки А. Это позволяет определить скорость и ускорение любой точки шестерни II.
Прежде всего, необходимо найти положение мгновенного центра скоростей (точку ) шестерни II. Так как скорости точек A и K параллельны друг другу и при этом линия AK перпендикулярна скоростям и , то мгновенный центр скоростей, находящийся в точке пересечения прямых, проведенных через начала и концы векторов скоростей. Здесь учтено, на основании сравнения (2) и (9), что > .
Величина угловой скорости шестерни II может быть определена на основании соотношения
(10)
Из свойств пропорции получим
(11)
Подставляя (1) и (8) в равенство (11), получим
(12)
Для заданного положения механизма
. (13)
Направление вращения шестерни II вокруг мгновенного центра скоростей (точки ), определяемое направлением скоростей точек A и K, условно показано на рисунке дуговой стрелкой .
Алгебраическую величину углового ускорения шестерни II определим на основании формулы
(14) Учитывая (12), на основании (14) получим
(15)
По условию задачи кривошип OA вращается ускоренно. Это значит, что абсолютная величина угловой скорости кривошипа возрастает. В этом случае , то есть
, (16) где - заданная абсолютная величина углового ускорения кривошипа.
Шестерня I вращается замедленно. При этом абсолютная величина угловой скорости шестерни I убывает и, следовательно, . Таким образом
, (17) где - заданная величина углового ускорения шестерни I.
В результате подстановки (16) и (17) в (15) найдем
Для заданного положения механизма
Так как знаки и совпадают, шестерня II вращается ускоренно. Направление покажем на рисунке дуговой стрелкой в сторону .
На основании (1),(10) и (12) нетрудно найти расстояние A:
Для заданного положения механизма, учитывая (2) и (13), получим
Величину скорости точки B (VB) можно найти по формуле
, (19)
где (20)
Учитывая (13) и (20) на основании (19) найдем величину скорости точки B для заданного положения механизма
Вектор скорости ( ) направлен перпендикулярно прямой в сторону вращения шестерни II, указанную дуговой стрелкой .
Ускорение точки B можно найти на основании теоремы об ускорениях точек плоской фигуры, приняв точку A за полюс
, (21)
где и - соответственно нормальное и касательное ускорения точки B при относительном вращательном движении шестерни II вокруг полюса А.
С учетом (3), (21) примет вид
. (22)
Величины нормального ( ) и касательного ( ) ускорений точки B при относительном вращательном движении шестерни II вокруг полюса A определяются по формулам
, (23)
, (24)
Для заданного положения дифференциального механизма на основании (23) и (24) с учетом (13) и (18) получим
, (25)
. (26)
При этом нормальное ускорение направлено вдоль ВА к центру относительного вращения (к полюсу А), а касательное ускорение направлено перпендикулярно ВA в сторону, указанную дуговой стрелкой . Таким образом, в векторном равенстве (22) известны модули и направления всех четырех векторов, стоящих справа от знака равенства. Для определения ускорения точки B ( ) найдем его проекции на две оси координат x, y, показанные на рис. 4.5. Проекция на любую ось равна алгебраической сумме проекций ускорений на ту же ось. Проекции этих ускорений легко найти из чертежа. Таким образом
.
.
По найденным двум проекциям ускорения точки B нетрудно найти его модуль и направление. Модуль ускорения точки B

 ) и кривошипа ОА (
) и кривошипа ОА (  ). Варианты схем приведены на рисунках 9,10. Необходимые данные приведены в таблице 3.
). Варианты схем приведены на рисунках 9,10. Необходимые данные приведены в таблице 3. ) определим по формуле
) определим по формуле (1)
(1) (2)
(2) .
. . (3)
. (3) ) и касательного (
) и касательного (  ) ускорений определим
) ускорений определим (4)
(4) (5)
(5) (6)
(6) (7)
(7)
 ри этом нормальное ускорение точки А (
ри этом нормальное ускорение точки А (  направлено по радиусу окружности, описываемой точки А, к центру этой окружности – к точке О, а касательное ускорение (
направлено по радиусу окружности, описываемой точки А, к центру этой окружности – к точке О, а касательное ускорение (  ) – по касательной к этой окружности, перпендикулярно ОА, в сторону, указанную дуговой стрелкой eOA .
) – по касательной к этой окружности, перпендикулярно ОА, в сторону, указанную дуговой стрелкой eOA . 
 )
) . (8)
. (8) =1∙ 0,2= 0,2 м/с.
=1∙ 0,2= 0,2 м/с. ) в направлении вращения шестерни I, указанном на рисунке 8 дуговой стрелкой w1.
) в направлении вращения шестерни I, указанном на рисунке 8 дуговой стрелкой w1. ) шестерни II. Так как скорости точек A и K параллельны друг другу и при этом линия AK перпендикулярна скоростям
) шестерни II. Так как скорости точек A и K параллельны друг другу и при этом линия AK перпендикулярна скоростям  и
и  (10)
(10) (11)
(11) (12)
(12) . (13)
. (13) .
. (14) Учитывая (12), на основании (14) получим
(14) Учитывая (12), на основании (14) получим (15)
(15) возрастает. В этом случае
возрастает. В этом случае  , то есть
, то есть , (16) где
, (16) где  - заданная абсолютная величина углового ускорения кривошипа.
- заданная абсолютная величина углового ускорения кривошипа. . Таким образом
. Таким образом , (17) где
, (17) где  - заданная величина углового ускорения шестерни I.
- заданная величина углового ускорения шестерни I.

 и
и  совпадают, шестерня II вращается ускоренно. Направление
совпадают, шестерня II вращается ускоренно. Направление  покажем на рисунке дуговой стрелкой в сторону
покажем на рисунке дуговой стрелкой в сторону  .
. Для заданного положения механизма, учитывая (2) и (13), получим
Для заданного положения механизма, учитывая (2) и (13), получим
 , (19)
, (19) (20)
(20)
 ) направлен перпендикулярно прямой
) направлен перпендикулярно прямой  в сторону вращения шестерни II, указанную дуговой стрелкой
в сторону вращения шестерни II, указанную дуговой стрелкой  , (21)
, (21) и
и  - соответственно нормальное и касательное ускорения точки B при относительном вращательном движении шестерни II вокруг полюса А.
- соответственно нормальное и касательное ускорения точки B при относительном вращательном движении шестерни II вокруг полюса А. . (22)
. (22) ) и касательного (
) и касательного (  ) ускорений точки B при относительном вращательном движении шестерни II вокруг полюса A определяются по формулам
) ускорений точки B при относительном вращательном движении шестерни II вокруг полюса A определяются по формулам , (23)
, (23) , (24)
, (24) , (25)
, (25) . (26)
. (26) направлено перпендикулярно ВA в сторону, указанную дуговой стрелкой
направлено перпендикулярно ВA в сторону, указанную дуговой стрелкой  . Таким образом, в векторном равенстве (22) известны модули и направления всех четырех векторов, стоящих справа от знака равенства. Для определения ускорения точки B (
. Таким образом, в векторном равенстве (22) известны модули и направления всех четырех векторов, стоящих справа от знака равенства. Для определения ускорения точки B (  ) найдем его проекции на две оси координат x, y, показанные на рис. 4.5. Проекция
) найдем его проекции на две оси координат x, y, показанные на рис. 4.5. Проекция  на ту же ось. Проекции этих ускорений легко найти из чертежа. Таким образом
на ту же ось. Проекции этих ускорений легко найти из чертежа. Таким образом .
. .
. .
. (с-1)
(с-1)
 (с-2)
(с-2)
 (с-1)
(с-1)
 (с-2)
(с-2)
 (град.)
(град.)