Вариант задания определяется двухзначным числом, соответствующим двум последним цифрам шифра зачетной книжки. По последней цифре шифра выбирается номер схемы, по предпоследней цифре шифра - номер условия. Например № 123945 –шифр зачетной книжки. Две последние цифры 45, 5 – схема, 4 – четвертая строка по таблице условий.
Примеры решения и варианты схем к заданиям
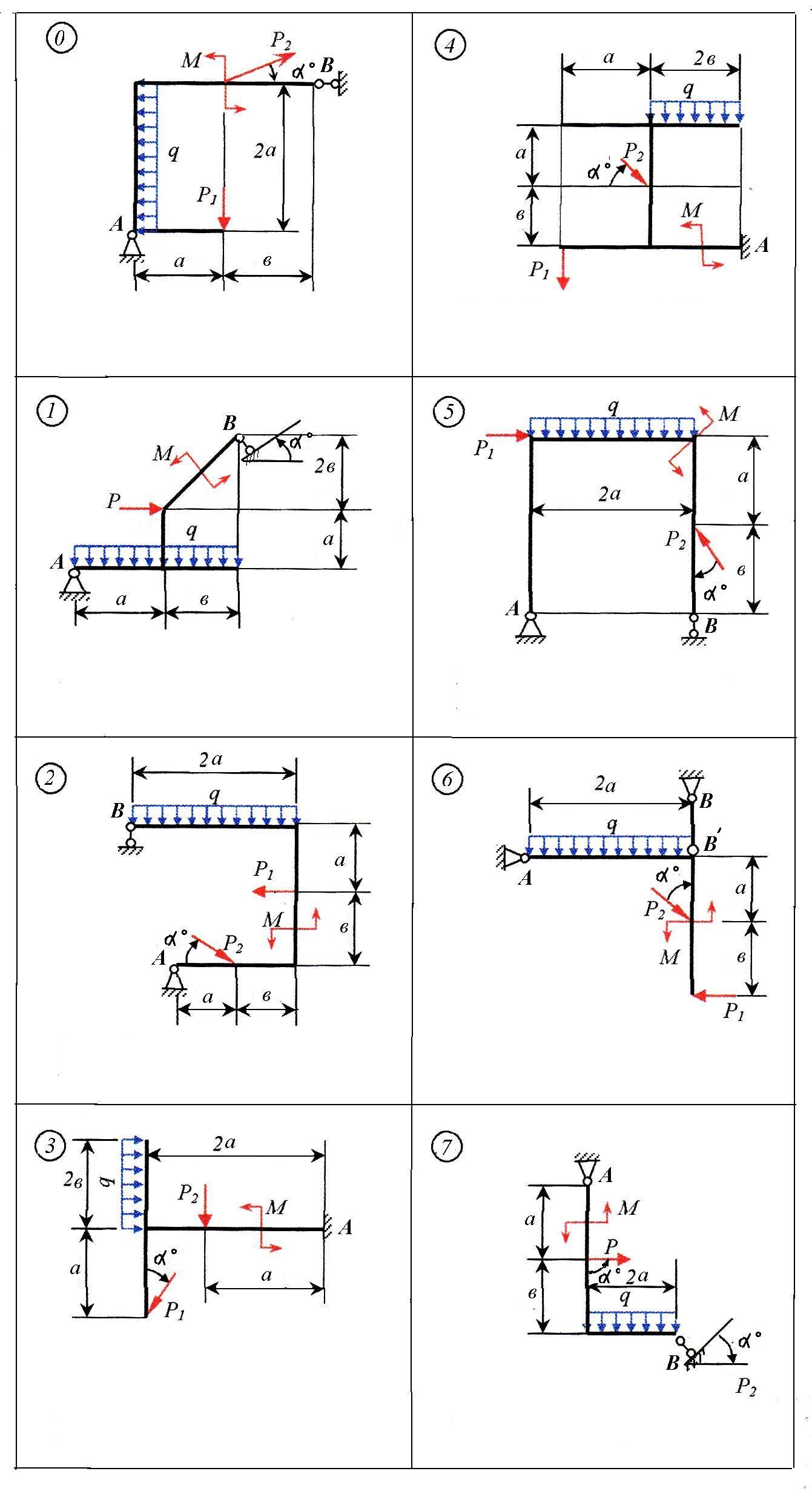
Задание №1 Равновесие плоской системы произвольно расположенных сил
Найти реакции связей рамы, схемы которых представлены на рисунках 3,4. Необходимые данные приведены в таблице 1.
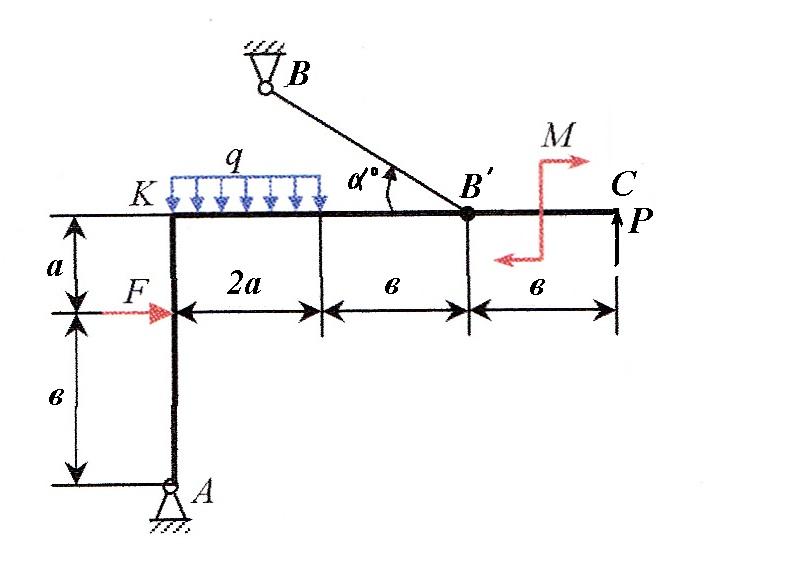
Пример выполнения задания №1
Дано: F = 10 кН, P = 5 кН, M = 8 кН×м, q = 0,5 кН/м, а = 1м, в = 2м, = 30 .
Определить реакцию опоры А и реакцию стержня BВ'?
Рисунок 1 – Схема к заданию №1
Решение
На раму наложены следующие связи: шарнирно-неподвижная опора, стержень BD и нить. Отбросим связи, заменив их силами (рисунок 2).
1 м
2 м
2 м
F
A
300
у
K
M
P
C
х
1 м
XA
YA
B
Q
Рисунок 2 – Расчетная схема к примеру решения задания №1
Так как направление реакции шарнирно-неподвижной опоры А неизвестно, то определим её составляющие и . Реакция стержня S направлена вдоль этого стержня, реакция нити по модулю равна весу груза Р. Распределённую нагрузку интенсивностью q заменим сосредоточенной силой Q, равной кН и приложенной в центре тяжести эпюры этой нагрузки. Проводим оси координат.
Для плоской системы сил, приложенных к раме, составим три уравнения равновесия:
; (1)
; (2)
(3)
Момент от силы S найден с использованием теоремы Вариньона: момент равнодействующей равен сумме моментов составляющих.
Из уравнения (3) находим
Из уравнения (1)
Из уравнения (2)
Ответ: , ,
Знаки минус в значениях ХА и УА указывают на то, что принятые направления этих сил противоположны действительным.
Варианты схем к заданию №1
Таблица 1-Условия к заданию №1
Номер условия
Р1, кН
Р2, кН
М, кН∙м
q, кН/м
а, м
в, м
град.
0,6
0,4
0,8
0,6
0,10
0,8
0,4
0,2
0,4
0,6
0,2
0,4
0,8
0,6
0,3
0,8
0,4
0,2
0,8
0,6
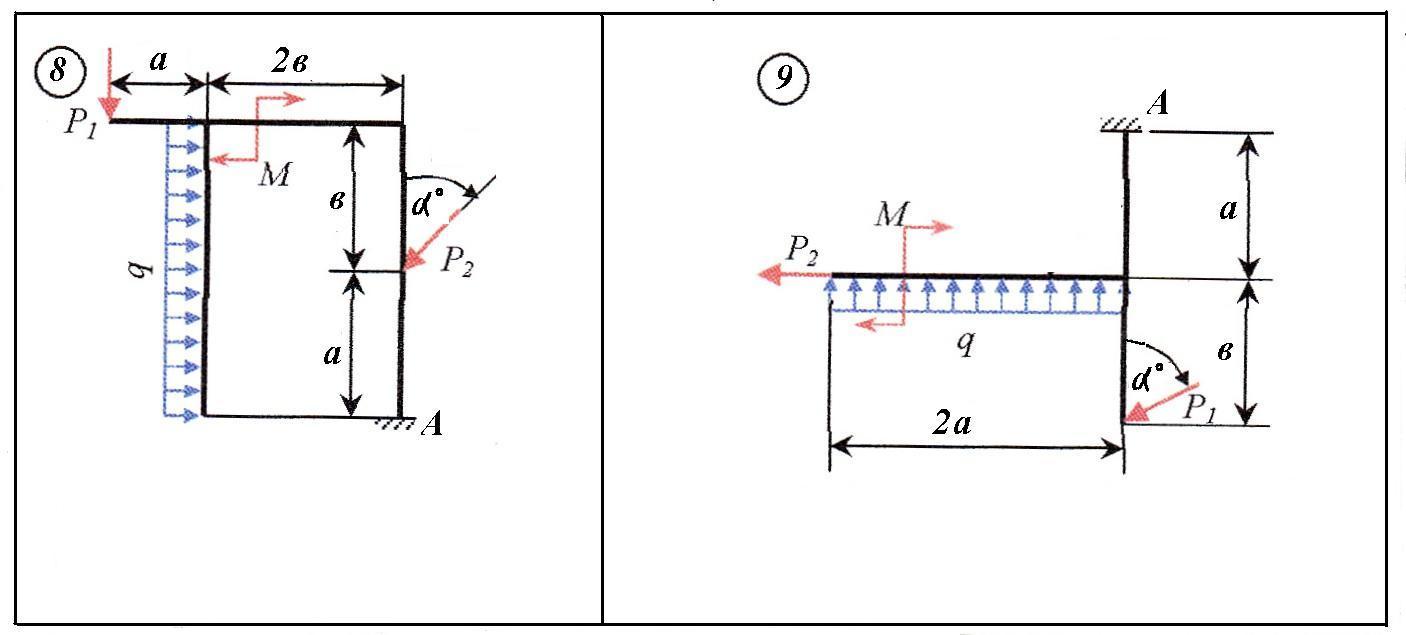
Рисунок 3 - Варианты схем к заданию №1
Рисунок 4 – Варианты схем к заданию №1
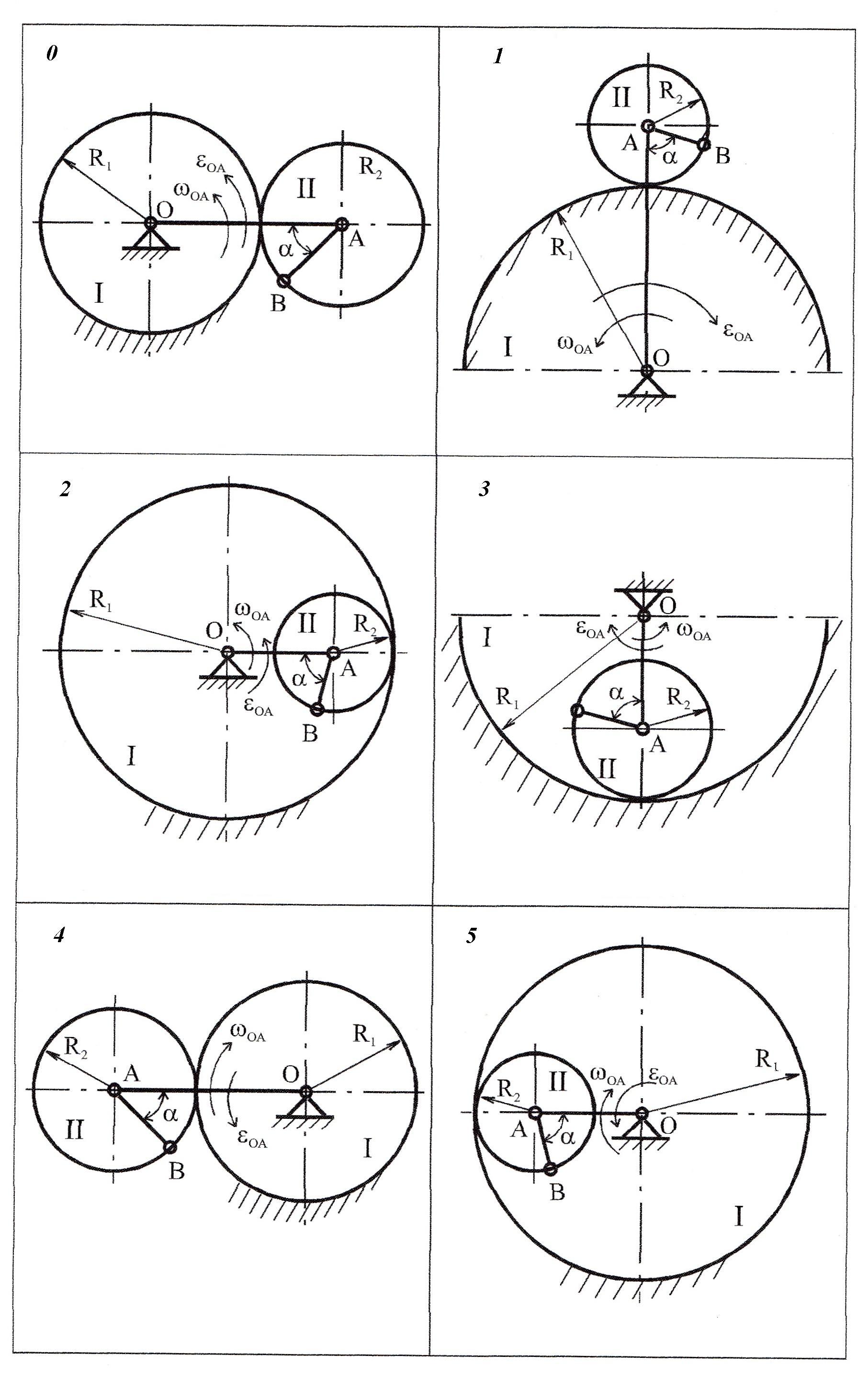
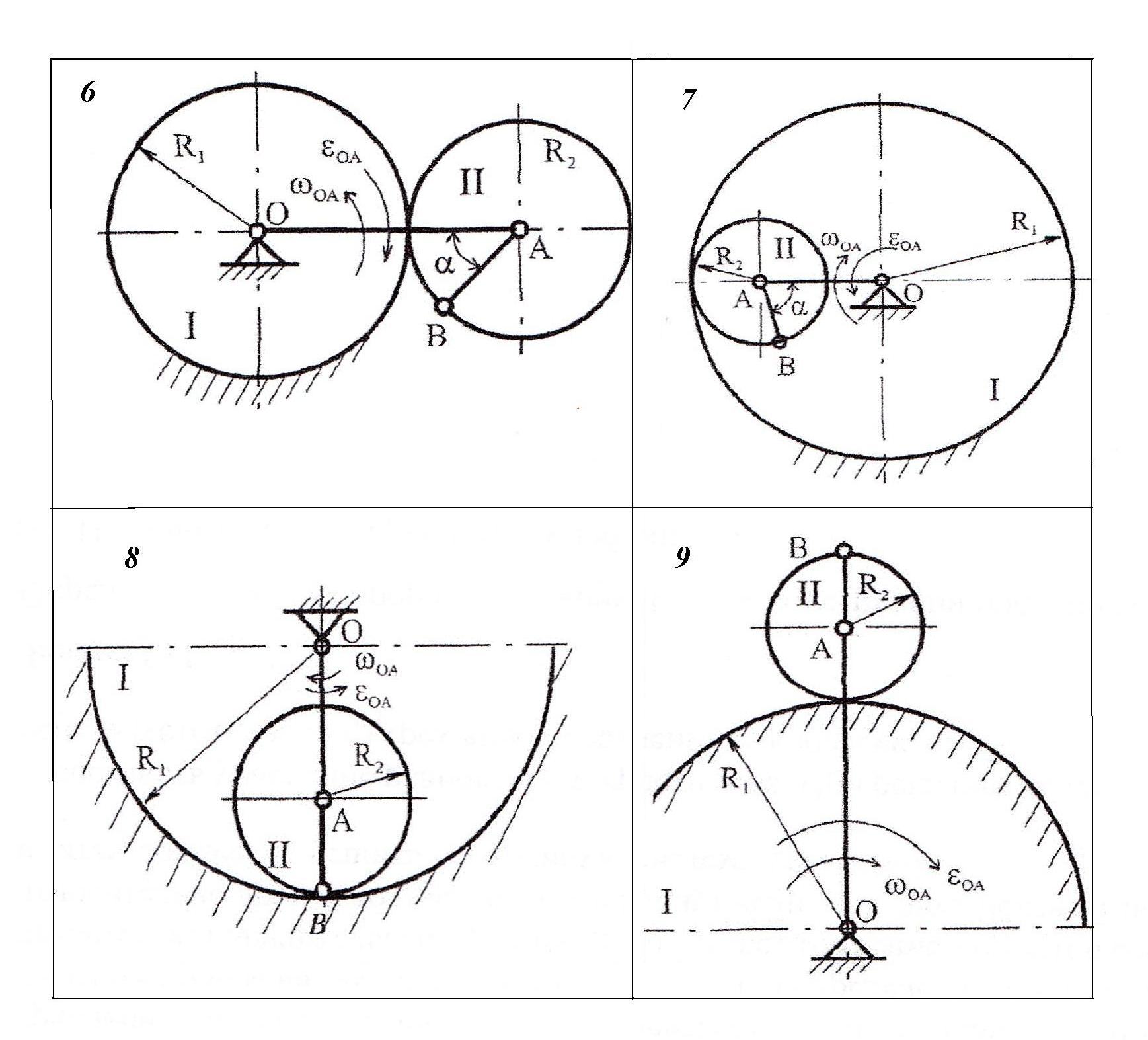
Задание №2 Кинематика планетарных механизмов
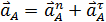
В планетарном механизме шестерня I радиуса R1 неподвижна, а кривошип ОА, вращаясь вокруг неподвижной оси, проходящей через точку О перпендикуляр- но плоскости рисунка, приводит в движение свободно насаженную на его конец А шестерню II радиуса R2 . Для указанного на рисунке положения механизма найти скорости и ускорения кривошипа ( ). Угол следует поворачи-вать против часовой стрелки от исходного положения. Схемы к решению задания №2 представлены на рисунках 6,7. Необходимые данные в таблице 2.
Пример выполнения задания №2
Дана кинематическая схема планетарного механизма (рисунок 5)
R1= 0,6 м; R2= 0,4 м; wOA= 1 с-1; eOA= 1 с-2.
Определить скорости и ускорения точек A и B, показанных на рисунке, если a = 60°.
Решение
Рассмотрим последовательно движения каждого из двух подвижных звеньев планетарного механизма.
Начинать при этом необходимо со звена, угловая скорость и угловое ускорение которого заданы. Таким образом, начнем исследование кинематики механизма с кривошипа.
1. Кривошип OA совершает вращательное движение вокруг неподвижной оси, проходящей через точку О перпендикулярно плоскости рисунка. Определим скорость и ускорение точки А кривошипа, которая одновременно принадлежит и подвижной шестерне II.
Абсолютная величина скорости точки A ( ) определяется по формуле.
(1)
Для заданного положения механизма
(2)
Вектор скорости направлен перпендикулярно ОА (радиусу вращения) в направлении вращения, указанному на рис.3.5 дуговой стрелкой
. (3)
Величины нормального ( ) и касательного ( ) ускорений определим соответственно по формулам:
(4)
(5)
Для заданного положения механизма
(6)
(7)
При этом нормальное ускорение точки А ( ) направлено по радиусу
окружности, описываемой точкой к центру этой окружности - к точке О.
Рисунок 5 – К примеру решения задания №2
Касательное ускорение ( ) направлено по касательной к этой окружности
(перпендикулярно OA) в сторону, указанную дуговой стрелкой . Это объясняется тем, что при замедленном вращении (по условию задачи кривошип ОА вращается замедленно) касательное ускорение направляется в сторону, противоположную направлению вращения, указанного дуговой стрелкой . В то же время при замедленном вращении угловое ускорение направляется также в сторону, противоположную направлению угловой скорости.
Величина ускорения точки А в соответствии с соотношением (3) и с учетом (6) и (7) для заданного положения механизма определится по
формуле:
.
2. Шестерня II совершает плоскопараллельное (плоское) движение. Учитывая, что шестерня II катится без скольжения по неподвижной шестерне I, мгновенный центр скоростей (точка ) подвижной шестерни будет находиться в точке соприкосновения двух шестерен (рис.3.5).
Для заданного положения планетарного механизма выше определена скорость центра шестерни II (точки А). Таким образом, зная величину скорости одной из точек и положение мгновенного центра скоростей подвижной шестерни, можно определить величину ее мгновенной угловой скорости ( ) по формуле
, (7)
где расстояние .
В результате подстановки значения и (1) в соотношение (7) получим
(8)
Для заданного положения механизма
. (9)
Направление мгновенного вращения шестерни II вокруг мгновенного центра скоростей (точки ), определяемое направлением скорости точки А ( ), условно показано на рисунке 5 дуговой стрелкой .
Шестерня II в указанном положении движется замедленно. Это следует
из сопоставления направлений векторов и (они направлены в противоположные стороны). Следовательно, угловое ускорение шестерни II ( ) направлено в сторону, противоположную направлению угловой скорости , что условно показано на рисунке 5 дуговой стрелкой .
Величину углового ускорения определим по формуле
(10)
Учитывая (8), на основании (10) получим
(11)
где - величина углового ускорения кривошипа ОА. Для заданного положения механизма
(12)
Таким образом, для некоторого момента времени найдены положение мгновенного центра скоростей, угловая скорость, угловое ускорение подвижной шестерни II, а также ускорение точки А. Это позволяет найти скорость и ускорение любой точки шестерни.
Прежде всего определим абсолютную величину скорости точки B ( ) по формуле
, (13) где - расстояние от точки В до мгновенного центра скоростей. Расстояние определим из треугольника A . Этот треугольник
равносторонний и, следовательно,
. (14) Для заданного положения механизма, учитывая (9) и (14), на основании
(13) получим
. (15)
Вектор скорости направлен перпендикулярно прямой . Ускорение точки B можно найти на основании теоремы об ускорениях точек плоской фигуры, приняв точку A за полюс
, (16)
где и - соответственно нормальное и касательное ускорения точки B при относительном вращательном движении шестерни II вокруг полюса А. Учитывая (3), формулу (16) представим в виде
. (17)
Величины нормального ( ) и касательного ( ) ускорений точки B при относительном вращательном движении шестерни II вокруг полюса A определяются по формулам
, (18)
, (19)
Для заданного положения механизма на основании (18) и (19) с учетом (9) и (12) получим
(20)
. (21)
При этом нормальное ускорение направлено вдоль ВА к центру относительного вращения (к полюсу А), а касательное ускорение направлено перпендикулярно прямой АВ в сторону, указанную дуговой стрелкой .
Таким образом, найдены модули четырех векторов ускорений, стоящих в правой части векторного равенства (17), и показаны их направления в точке В на рисунке 5. Найдем ускорение точки В как геометрическую сумму четырех показанных в точке ускорений аналитическим способом. Для этого спроектируем векторы, стоящие в правой и левой части равенства (17), на две оси координат x, y.
. (22)
. (23)
Учитывая (6), (7) (20) и (21), на основании (22) и (23) найдем для заданного положения механизма проекции ускорения точки В на оси x, y.
Проекции вектора ускорения (лежащего в плоскости xy) на две оси координат полностью определяют его модуль и направление. Итак, величина

 - центростремительной (нормальное) ускорение т.А, м/с2
- центростремительной (нормальное) ускорение т.А, м/с2 - касательное (тангенсальное) ускорение т.А. м/с2
- касательное (тангенсальное) ускорение т.А. м/с2 - угловая скорость звена,с-1
- угловая скорость звена,с-1 -угловое ускорение звена, с-2
-угловое ускорение звена, с-2 ин- сила инерции, Н
ин- сила инерции, Н ин -реакция инерции, Н
ин -реакция инерции, Н = 30
= 30  .
.

 и
и  . Реакция стержня S направлена вдоль этого стержня, реакция нити по модулю равна весу груза Р. Распределённую нагрузку интенсивностью q заменим сосредоточенной силой Q, равной
. Реакция стержня S направлена вдоль этого стержня, реакция нити по модулю равна весу груза Р. Распределённую нагрузку интенсивностью q заменим сосредоточенной силой Q, равной  кН и приложенной в центре тяжести эпюры этой нагрузки. Проводим оси координат.
кН и приложенной в центре тяжести эпюры этой нагрузки. Проводим оси координат. ; (1)
; (1) ; (2)
; (2) (3)
(3)


 ,
,  ,
, 
 град.
град.
 ). Угол
). Угол  следует поворачи-вать против часовой стрелки от исходного положения. Схемы к решению задания №2 представлены на рисунках 6,7. Необходимые данные в таблице 2.
следует поворачи-вать против часовой стрелки от исходного положения. Схемы к решению задания №2 представлены на рисунках 6,7. Необходимые данные в таблице 2. ) определяется по формуле.
) определяется по формуле. (1)
(1) (2)
(2) направлен перпендикулярно ОА (радиусу вращения) в направлении вращения, указанному на рис.3.5 дуговой стрелкой
направлен перпендикулярно ОА (радиусу вращения) в направлении вращения, указанному на рис.3.5 дуговой стрелкой 
 . (3)
. (3) ) и касательного (
) и касательного (  ) ускорений определим соответственно по формулам:
) ускорений определим соответственно по формулам: (4)
(4) (5)
(5) (6)
(6) (7)
(7) ) направлено по радиусу
) направлено по радиусу
 ) направлено по касательной к этой окружности
) направлено по касательной к этой окружности . Это объясняется тем, что при замедленном вращении (по условию задачи кривошип ОА вращается замедленно) касательное ускорение направляется в сторону, противоположную направлению вращения, указанного дуговой стрелкой
. Это объясняется тем, что при замедленном вращении (по условию задачи кривошип ОА вращается замедленно) касательное ускорение направляется в сторону, противоположную направлению вращения, указанного дуговой стрелкой  . В то же время при замедленном вращении угловое ускорение направляется также в сторону, противоположную направлению угловой скорости.
. В то же время при замедленном вращении угловое ускорение направляется также в сторону, противоположную направлению угловой скорости. .
. ) подвижной шестерни будет находиться в точке соприкосновения двух шестерен (рис.3.5).
) подвижной шестерни будет находиться в точке соприкосновения двух шестерен (рис.3.5). ) по формуле
) по формуле , (7)
, (7) .
. и (1) в соотношение (7) получим
и (1) в соотношение (7) получим (8)
(8) . (9)
. (9) ), условно показано на рисунке 5 дуговой стрелкой
), условно показано на рисунке 5 дуговой стрелкой  .
. и
и  ) направлено в сторону, противоположную направлению угловой скорости
) направлено в сторону, противоположную направлению угловой скорости  (10)
(10) (11)
(11) - величина углового ускорения кривошипа ОА. Для заданного положения механизма
- величина углового ускорения кривошипа ОА. Для заданного положения механизма (12)
(12) ) по формуле
) по формуле , (13) где
, (13) где  - расстояние от точки В до мгновенного центра скоростей. Расстояние
- расстояние от точки В до мгновенного центра скоростей. Расстояние  определим из треугольника A
определим из треугольника A  . (14) Для заданного положения механизма, учитывая (9) и (14), на основании
. (14) Для заданного положения механизма, учитывая (9) и (14), на основании . (15)
. (15) направлен перпендикулярно прямой
направлен перпендикулярно прямой  , (16)
, (16) и
и  - соответственно нормальное и касательное ускорения точки B при относительном вращательном движении шестерни II вокруг полюса А. Учитывая (3), формулу (16) представим в виде
- соответственно нормальное и касательное ускорения точки B при относительном вращательном движении шестерни II вокруг полюса А. Учитывая (3), формулу (16) представим в виде . (17)
. (17) ) и касательного (
) и касательного (  ) ускорений точки B при относительном вращательном движении шестерни II вокруг полюса A определяются по формулам
) ускорений точки B при относительном вращательном движении шестерни II вокруг полюса A определяются по формулам , (18)
, (18) , (19)
, (19) (20)
(20) . (21)
. (21) . (22)
. (22) . (23)
. (23)

 (лежащего в плоскости xy) на две оси координат полностью определяют его модуль и направление. Итак, величина
(лежащего в плоскости xy) на две оси координат полностью определяют его модуль и направление. Итак, величина .
. (с-1)
(с-1)
 (с-2)
(с-2)