Как измерить для ДСА в процессе его движения координаты , , ? Измерение координаты было рассмотрено в разделе датчиков. Гораздо труднее получить информацию о продольной - и поперечной - дальностях.
Если ПА движется по прямой, то пройденный путь , а V можно измерить, например, средствами гидроакустики – доплеровским методом; по скоростному напору, на торпедах – от винтов.
Но если ДСА движется не по прямой, как получить информацию о положении? Существует два принципиально разных подхода.
1. Информацию о , может быть получена извне посредством спутниковых навигационных систем. Их много, но наиболее точная и общедоступная – это система GPS. Под этим именем подразумеваются три навигационные системы: Navstar – разработки США, ГЛОНАСС – разработки СССР (Россия), Галилео – разработки Евросоюза. Навигационная система Navstar полностью развернута и функционирует более 10-ти лет(в ее составе более 24 спутников): Развертывание системы ГЛОНАСС завершается. Она функционирует на всей территории России. Развертывание системы Галилео только начинается. Навигационные системы GPS позволяют получить один раз в секунду : три геодезические координаты- широту, долготу и высоту, скорость движения и мировое время. Для получения этой информации в поле зрения приемника GPS должны находиться минимум 4 спутника. При наличии в поле зрения 3-х спутников можно получить только три геодезические координаты и время. Все спутники одной системы работают синхронно и один раз в секунду излучают электромагнитный сигнал. В сигнале содержится информация о факте излучения сигнала и служебная информация о принадлежности сигнала конкретному спутнику и другая информация. В точке приема по разности по времени приема сигналов и служебной информации от нескольких спутников можно определить геодезические координаты точки приема. Точность системы Navstar по координатам ~ 10м – в общедоступном варианте, ~ 3м – в оборонном варианте, ~ 1м – в дифференциальном режиме для определенных районов. Для системы ГЛОНАСС заявлена точность ~ 10м. О наличии оборонного варианта нет информации. Евросоюз обещает точность для системы Галилео ~1м.
Для того чтобы пользоваться услугами спутниковой навигационной системы необходимо иметь антенну и приемник. Приемное оборудование GPS ничего в пространство не излучает, а работает только на прием. Антенна в ширпотребном варианте имеет размер спичечного коробка половинной толщины, и примерно такие же размеры имеет электронная печатная плата приемника. В специальном варианте размеры антенны могут немного больше. Например для надводного корабля - в размер яблока. (10 лет назад размеры печатных плат для приемника были немного большего размера –привести пример).
Область применения систем GPS чрезвычайно велика и постоянно расширяется. (От прогулки по лесу до крылатых ракет и КАБов) Существенными недостатками системы GPS являются следующие. Невозможность работы в подводном положении. Невозможность работы вне планеты Земля.
2. Второй способ получения информации о точке нахождения аппарата это получение ее непосредственно на борту аппарата без использования внешних источников информации. Чтобы понять принцип как это сделать упростим задачу. Будем считать поверхность земли плоской. Принципиально это ничего не меняет кроме упрощения математических преобразований. Существуют такие приборы, которые измеряют линейное ускорение. Эти приборы называют акселерометрами. Разместим эти приборы на ДСА измерительными осями вдоль осей системы как показано на нижеследующем рисунке.
В этом случае координаты можно вычислять в процессе движения аппарата путем двойного интегрирования ускорений , , по следующим формулам
. Для выполнения вычислений необходимо знать начальные значения координат и начальных скоростей и текущие значения ускорений вдоль осей системы .
Трудность реализации расчета по приведенным формулам состоит в том, что компоненты ускорения должны измеряться вдоль осей неизменно направленных в пространстве. Но ДСА изменяет свое угловое положение в полете. Чтобы получить фиксированное направление осей , , внутри ДСА, существует такой прибор – гиростабилизированная платформа (ГСП). При любых угловых эволюциях ДСА в пространстве ГСП сохраняет свое положение относительно осей . Тогда, разместив на ней акселерометры так, чтобы они измеряли , , , можно вычислить согласно приведенным формулам. Следует отметить, что ГСП – сложнейшее и дорогостоящее электромеханическое устройство. Запуск ГСП в работу требует существенного времени, что подчас снижает тактические возможности ДСА.
Можно обойтись без ГСП. Это так называемая БИНС – бесплатформенная инерциальная навигационная система. Для реализации на борту ДСА БИНС поступают следующим образом.
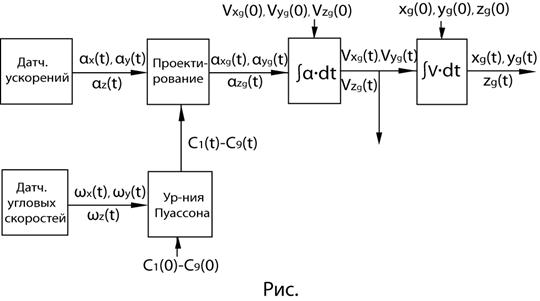
На борту аппарата закрепляют жестко вдоль связанных осей , , акселерометры, измеряющие ускорения , , . Проектируют ускорения , , на направление осей , , и получают значения ускорений вдоль осей стартовой земной системы координат , , . Для вычисления проекций ускорений , , на направление осей , , нужно иметь значения косинусов углов между осями связанной системы координат и осями стартовой земной системы координат, т.е. иметь значения направляющих косинусов связанной системы координат.
Зная текущие значения компонент ускорения аппарата , , , путем первого интегрирования непрерывно получают значения скоростей аппарата . Интегрируя скорости непрерывно получают координаты аппарата . Текущие значения направляющих косинусов движущегося аппарата вычисляют следующим образом. Помимо трех акселерометров на борту аппарата устанавливают три датчика угловых скоростей вращения аппарата, измеряющих угловые скорости вращения аппарата вокруг связанных осей.- , , . Используя текущие значения , , и решая в реальном масштабе времени уравнения Пуассона, получают текущие значения направляющих косинусов. Уравнения Пуассона для направляющих косинусов имеют следующий вид. , где , , , , , , , , . Структурная схема алгоритма БИНС приведена на следующем рисунке.
Не следует забывать, что приведенный алгоритм является упрощенным. При учете формы Земли и ее вращении алгоритм БИНС усложнится. БИНС является сложной и дорогостоящей системой. При ее реализации возникает ряд трудностей. К счастью существовавшая раньше трудность - наличие для реализации БИНС значительных вычислительных мощностей к настоящему времени преодолена. Основной трудностью является требование высокой точности датчиков угловых скоростей и акселерометров. Необходима высокая точность начальной ориентации и скорости аппарата.
Для БИНС характерно накопление ошибок в процессе ее работы. Поэтому при большом времени работы используют всевозможные методы коррекции БИНС от внешних источников информации.

 ,
,  ,
,  ?
? , а V можно измерить, например, средствами гидроакустики – доплеровским методом; по скоростному напору, на торпедах – от винтов.
, а V можно измерить, например, средствами гидроакустики – доплеровским методом; по скоростному напору, на торпедах – от винтов. как показано на нижеследующем рисунке.
как показано на нижеследующем рисунке.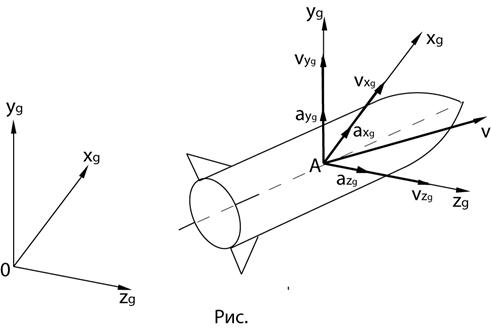
 можно вычислять в процессе движения аппарата путем двойного интегрирования ускорений
можно вычислять в процессе движения аппарата путем двойного интегрирования ускорений  ,
,  ,
,  по следующим формулам
по следующим формулам

 .
. и начальных скоростей
и начальных скоростей  и текущие значения ускорений вдоль осей системы
и текущие значения ускорений вдоль осей системы  ,
,  ,
,  внутри ДСА, существует такой прибор – гиростабилизированная платформа (ГСП). При любых угловых эволюциях ДСА в пространстве ГСП сохраняет свое положение относительно осей
внутри ДСА, существует такой прибор – гиростабилизированная платформа (ГСП). При любых угловых эволюциях ДСА в пространстве ГСП сохраняет свое положение относительно осей  . Тогда, разместив на ней акселерометры так, чтобы они измеряли
. Тогда, разместив на ней акселерометры так, чтобы они измеряли  ,
,  ,
,  акселерометры, измеряющие ускорения
акселерометры, измеряющие ускорения  ,
,  ,
,  .
. на направление осей
на направление осей  на направление осей
на направление осей  . Интегрируя скорости
. Интегрируя скорости  ,
,  ,
,  . Используя текущие значения
. Используя текущие значения 
 ,
, ,
,  ,
,  ,
, ,
,  ,
,  ,
, ,
,  ,
,  .
.