При углы и теряют смысл. Произвольное угловое положение аппарата в пространстве может быть определено девятью косинусами углов между осями связанной с аппаратом системы координат и осями системы координат , оси которой параллельны стартовой системе . Эти девять косинусов называются направляющими косинусами. Количество направляющих косинусов для однозначного описания произвольного углового положения аппарата избыточно. Из теоретической механики известно, что минимальное значение числа параметров полностью определяющих угловое положением ДСА в пространстве равно четырем. В качестве примера можно привести параметры Родрига-Гамильтона. На практике чаще используют 3 параметра - , , , доопределив их при четвертым параметром.
3) Третья группа параметров:
, , – угловые скорости движения ДСА вокруг связанных осей.
4) Четвертая группа параметров: - скорость полюса аппарата, - угол атаки аппарата, - угол дрейфа или скольжения. Вместо этих параметров могут применяться проекции скорости аппарата на связанные оси , , .
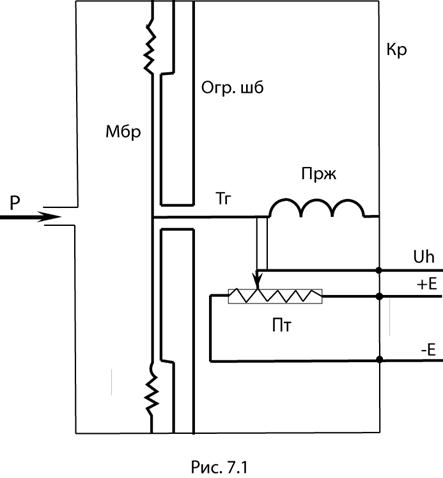
Для получения значений параметров каждой из перечисленных групп существуют свои датчики или измерительные системы. Измерительные системы для получения значений параметров первой группы , , будут рассмотрены в следующем разделе. Наиболее просто из этих параметров измеряется высота или глубина ДСА. В этом разделе рассмотрим измерение глубины и высоты ДСА. Глубина ДСА измеряется либо путем измерения давления водяного столба, либо гидроакустическим методом путем измерения времени распространения гидроакустического сигнала от аппарата до поверхности воды и обратно. Более распространен метод измерения глубины путем измерения давления водяного столба. 10 метров глубины соответствует давлению 1 атм. Для измерения используются датчики давления. Находят применение датчики давления мембранного типа, датчики давления с витой мембраной и тензометрические датчики давления. На рис.7.1 приведена схема датчика давления мембранного типа. Рассмотрим принцип его действия.
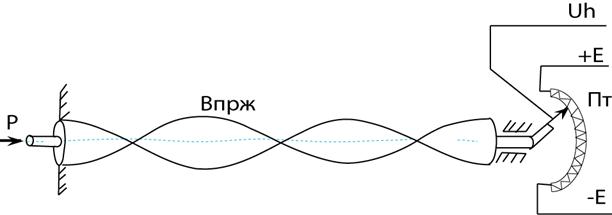
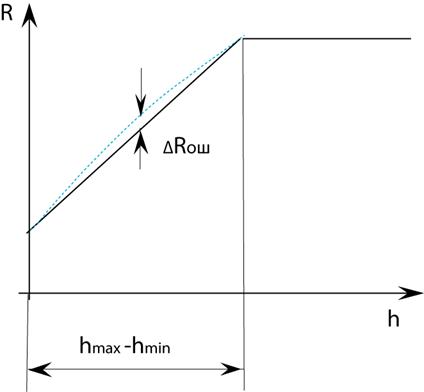
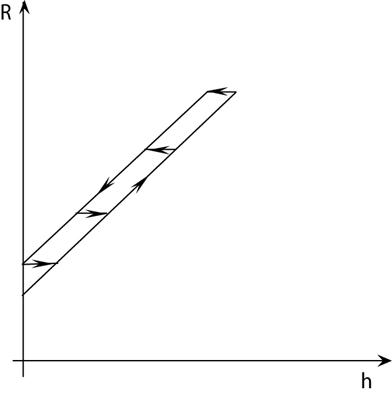
Корпус датчика Кр разделен мембраной Мбр на две полости. Левая полость корпуса соединена с забортным давлением воды. Правая часть герметична и заполнена нейтральным газом под давлением одна атмосфера. В правой полости размещается измерительная часть датчика. При погружении аппарата увеличивается давление Р и мембрана перемещается вправо. Мембрана соединена тягой Тг с тарированной пружиной Прж. Тяга перемещается прямо пропорционально давлению Р. Внутри правой полости размещен линейный переменный резистор Пт. Ползунок переменного резистора Пт соединен с тягой Тг. На намотку переменного резистора подается напряжение +/- Е.Напряжение Uh, снимаемое с ползунка, будет прямо пропорционально измеряемому давлению и следовательно глубине аппарата. В правой полости также размещается ограничительная шайба Огр.шб предотвращающая разрушение датчика при глубинах Р значительно больших чем диапазон измерения датчика. Точность мембранных датчиков составляет 1% от максимальной глубины измерения. Максимальная глубина измерения мембранных датчиков достигает 250 метров. Второй тип датчиков давления, используемых для измерения глубины ДСА, это датчики давления с витой мембраной. Устройство измерительной части такого датчика (не показан корпус датчика) приведена на следующем рисунке. Рис Витая пружина Впрж представляет собой сплющенную до овального сечения трубку, скрученную вокруг продольной оси. Выполнена трубка из упругой стали. Правый конец трубки заварен и закреплен на корпусе датчика в подшипнике. Левый конец трубки жестко закреплен на корпусе датчика и имеет доступ жидкости из внешней среды (давление Р). Правый конец трубки – ось подшипника соединены с ползунком переменного резистора Пт. При увеличении забортного давления (глубины) трубка начнет раскручиваться. Угол поворота трубки будет пропорционален забортному давлению (глубине) и пропорциональным глубине будет напряжение Uh с ползунка переменного резистора. Максимальная глубина измерения такими датчиками лежит от 200м до 1.5км. Точность датчиков с витой мембранных составляет 0.8% от максимальной глубины измерения. Третий тип датчиков давления, применяемый для измерения глубины, это тензометрические датчики. В этом датчике давления механо-электрический преобразователь (тензометрический элемент) приклеен к плоской или выпуклой упругой пружине. Точность тензометрических датчиков давления достигает 0,1 – 0,2 % от максимальной глубины измерения. Максимальная глубина измерения такими датчиками достигает 1.5км. Погрешность измерения давления датчиками складывается из погрешности типа гладкой нелинейности (см. рисунок), из погрешности типа гистерезиса и нечувствительности (см. следующий рисунок). Рис Третья погрешность это нестабильность параметров датчика во времени. На входе датчиков давления иногда ставят фильтр из мелкой сетки для сглаживания пульсаций давления в показаниях датчика. Иногда устанавливают разделитель сред, чтобы морская вода не попадала в датчик давления. Рис
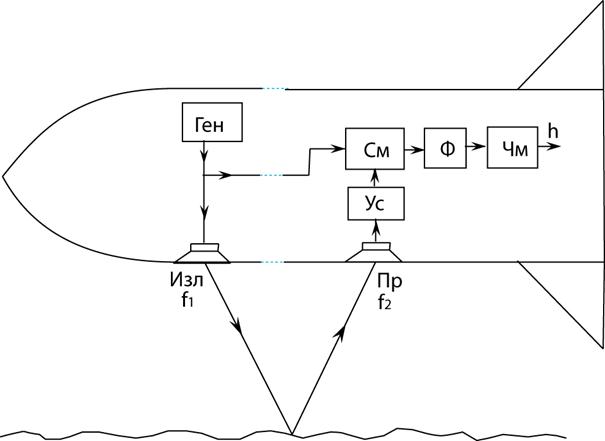
Измерение высоты полета крылатой ракеты. Основным измерительным прибором является радио высотомер. Принцип работы любого радиовысотомера состоит в измерении разности времени распространения электромагнитной волны от источника электромагнитных колебаний до приемника по двум путям - внутри ракеты и вне ракеты (до морской поверхности и обратно). Зная скорость распространения электромагнитных волн и геометрию распространения легко рассчитать высоту полета. Рассмотрим структуру радиовысотомера с линейной частотной модуляцией. На борту ракеты находится генератор высокочастотных колебаний ГЕН. (см. рис.) Частота колебаний генератора меняется по линейному закону (см. следующий рисунок). От генератора высокочастотное напряжение подается на излучающую антенну Изл, расположенную в нижней части носового отсека, и на смеситель См, расположенный в хвостовом отсеке ракеты. В нижней части хвостового отсека размещена приемная антенна Пр. Передающая антенна излучает электромагнитные волны во внешнюю среду в сторону Рис моря. Приемная антенна принимает электромагнитные волны со стороны моря и преобразует их в высокочастотный электрический сигнал. От приемной антенны высокочастотный сигнал усиливается усилителем Ус и поступает на второй вход смесителя См. Смеситель выполняет операцию типа перемножения двух входных сигналов – непосредственно от генератора Ген и от приемной антенны Пр. На выходе смесителя получаются электрические сигналы суммарной частоты и разностной частоты входных сигналов. Принятый сигнал имеет частоту, показанную пунктиром на рис. за счет того, что приходит позже, чем сигнал от генератора, проходящий внутри ракеты до смесителя. В каждый момент времени разность частот остается постоянной за исключением моментов времени, в который происходит изменение роста частоты на уменьшение и наоборот (см. нижний рисунок). От смесителя сигнал поступает на фильтр Ф, где выделяется электрический сигнал разностной частоты . Таким образом за счет частотной модуляции задержка по Рис времени принятого сигнала преобразуется в электрический сигнал разностной частоты . От фильтра электрический сигнал разностной частоты поступает на частотомер Чм. Разностная частота пропорциональна высоте полета ракеты. Тогда выходной сигнал частотомера с точностью до постоянного коэффициента является высотой полета ракеты.
Вторая группа датчиков – это измерители углов - курса, - дифферента (тангажа), - крена. В настоящее время текущие значения углов курса, дифферента и крена ДСА получают при помощи:
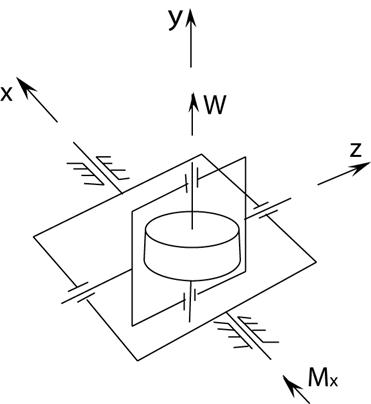
3) интегрирования дифференциальных уравнений, связывающих пер вые производные по времени углов курса, дифферента и крена с , , . Основой гироскопического датчика является свободный гироскоп, упрощенно представляющий собой устройство, изображенное на следующем рисунке. X, Y, Z – оси связанные с основанием, на котором установлен гироскоп, например ДСА.
Существует осесимметричное тело (ротор) в рассматриваемом случае с вертикальной осью симметрии (ось вращения). Ось вращения с помощь подшипников закреплена в двух рамках карданова подвеса, как показано на рисунке. Ось вращения внешней рамки карданова подвеса закреплена на корпусе ДСА. Данная механическая конструкция становится свободным гироскопом, если осесимметричное тело вращается с большой угловой скоростью –тысячи или десятки тысяч оборотов в минуту. Для рассмотрения свойств свободного гироскопа используют величину, называемую кинитическим моментом ротора , где . - момент инерции ротора относительно оси вращения, - угловая скорость вращения ротора относительно оси вращения. Кинитический момент - векторная величина. Основное свойство свободного гироскопа будем рассматривать в рамках прецессионной теории гироскопа. (не будем рассматривать высокочастотные колебания в гироскопе -нутацию). Пусть трение в осях карданова подвеса ничтожно мало. Если к внешней рамке приложить постоянный момент вокруг оси Х – , то внешняя рамка останется неподвижной, а внутренняя рамка станет вращаться с постоянной угловой скорость вокруг оси Z – . Угловая скорость называется прецессией. Величина угловой скорости прецессии вокруг оси Z равна . Вектор направлен так, чтобы совместить вектор и вектор . Если к внутренней рамке приложить постоянный момент вокруг оси Z – , то внутренняя рамка останется неподвижной, а внешняя рамка станет вращаться с постоянной угловой скорость вокруг оси X – . Угловая скорость также называется прецессией. Величина угловой скорости прецессии вокруг оси X равна . Вектор направлен так, чтобы совместить вектор и вектор . Из изложенного следует - если возмущающие моменты равны нулю, то положение вектора кинитического момента остается неизменным. Для сохранения неизменности направления вектора кинитического момента нужно уменьшать возмущающие моменты и увеличивать значение кинитического момента ротора. Особое значение имеет то свойство гироскопа, что возмущение рамки вокруг ее оси вращения не приводит к изменению ее положения.
На основе свободного гироскопа выполняют приборы измеряющие углы курса, дифферента и крена. Рассмотрим гироскопический прибор, измеряющий угол курса. Для ДСА с горизонтальным стартом в начале функционирования системы прибор устанавливают так, чтобы вектор кинитического момента был направлен вдоль оси Х ДСА, как показано на рисунке. Круговой переменный резистор неподвижно устанавливается на корпусе прибора и естественно на корпусе ДСА. Ползунок потенциометра связан с осью вращения внешней рамки гироскопа. Этот потенциометр непосредственно преобразует механический угол поворота в эквивалентный электрический сигнал.
Потенциометр является датчиком угла.
Если трение в осях вращения рамок гироскопа мало и трение в точке контакта ползунка с намоткой потенциометра также мало, то вектор кинитического момента очень точно сохраняет первоначальное направление. При повороте аппарата вокруг оси Y ползунок потенциометра остается неподвижным в пространстве поскольку неподвижными остаются рамки гироскопа, а корпус потенциометра поворачивается совместно с аппаратом. С ползунка потенциометра при этом снимается электрический сигнал пропорциональный углу поворота аппарата . При наличии трения в точке контакта ползунка с намоткой потенциометра внутренняя рамка гироскопа будет поворачиваться относительно оси Z. В настоящее время в гироскопах измеряющих , , в качестве датчиков угла переменный резистор используется достаточно редко. В большинстве случаев используют бесконтактные датчики угла, работающие на переменном токе бортовой сети, это
1) вращающийся трансформатор,
2) индукционный датчик угла. ( можно рассказать о принципе действия таких датчиков угла)
Рассмотрим гироскопический прибор, измеряющий одновременно углы дифферента и крена. Упрощенный рисунок этого датчика для и приведен на нижеследующем рисунке. Кинитический момент волчка гироскопа располагают вертикально. Внешняя рамка гироскопа располагается горизонтально. Ось вращения внешней рамки направляют вдоль связанной с аппаратом оси Х. На оси вращения внешней рамки закреплена внутренняя часть датчика угла крена (обычно индукционный датчик). Внешняя часть датчика угла крена закреплена на корпусе прибора. Внутреннюю рамку располагают вертикально , а ось ее вращения совпадает с осью Z. Ось вращения внутренней рамки в подшипниках закрепляют на внешней рамке. На оси вращения внутренней рамки закреплена внутренняя часть датчика угла дифферента (обычно вращающийся трансформатор). Внешняя часть датчика угла дифферента закреплена на внешней рамке прибора. Таким образом датчик угла крена измеряет угол между плоскость внешней рамки и горизонтальной плоскостью аппарата XAZ, т.е. угол крена. Датчик угла дифферента измеряет угол между плоскость внешней рамки и плоскостью внутренней рамки, т.е. угол дифферента.
При длительном функционировании ПА возможен дрейф направления кинитического момента W , и, как следствие, рост погрешностей измерения углов крена и дифферента. Для повышения точности измерения в приборе используют дополнительные устройства (маятник и моментные датчики) для коррекции направления вектора кинитического момента. На приведенном рисунке цепи коррекции не приведены. Приведенный на рисунке прибор с цепями коррекции называется гировертикалью. Из двух рассмотренных приборов наиболее точным является курсовой прибор.
Датчики угловой скорости . Для измерения компонент угловой скорости вращения аппарата ( , , .) обычно используют двухстепенные гироскопы (гиротахометры, ДУСы). Что это такое? На следующем рисунке приведена упрощенная схема двухстепенного гироскопа, закрепленного на аппарате так, чтобы измерять угловую скорость .
Гироскоп имеет одну рамку, в которой помещен волчок. Рамка расположена горизонтально. Ось ее вращения направлена вдоль связанной оси X. Вектор кинитического момента волчка также расположен горизонтально и направлен вдоль связанной оси Z. На оси вращения рамки размещена пружина, одним концом закрепленная на корпусе прибора, а другим через плечо рычага подсоединенная к оси рамки. Пружина может работать как на растяжение так и сжатие. На оси вращения рамки размещен также кольцевой переменный резистор. Кольцо намотки переменного резистора закреплено на корпусе, а ползунок соединен с осью рамки. На намотку резистора подается напряжение питания, а с ползунка снимается напряжение, пропорциональное угловой скорости аппарата вокруг оси Y.
Как работает этот прибор? Угловая скорость вызывает гироскопический момент вокруг оси X. Рамка гироскопа начнет поворачивается под действием этого момента до тех пор, пока гироскопический момент не станет равным моменту от упругой пружины. Угол, на который повернется ось рамки, растянув (или сжав) пружину, будет пропорционален . Технически пружина может быть механической или электрической. Датчики угла поворота оси рамки могут быть, как приведено в примере, потенциометрическими или в виде вращающегося трансформатора и т.д. Датчики приведенной конструкции имеют точность порядка 2% от максимального диапазона измерения. В настоящее время существует много типов гироскопических измерителей углов и угловых скоростей. Например такие: 1) гироскопы с воздушной опорой – механическая опора в подшипниках заменена газовой. 2) поплавковые гироскопы – подвижные элементы конструкции в герметичном виде помещены в жидкость с тяжелым удельным весом и силы давления в опорах компенсируются архимедовыми силами. 3) Динамически настраиваемые гироскопы (ДНГ). Это гироскопы с упругим подвесом ротора. Применяется внутренний карданов подвес с торсионным подвесом ротора. Ротор – снаружи. Торсионный внутренний карданов подвес внутри. Вращение внешнего ротора производится от двигателя через внутренний карданов подвес. Упругие свойства торсионов компенсируются надлежащим выбором моментов инерции элементов кардана. 4) Кольцевые лазерные гироскопы. (дусы) 5)Волоконно – оптические гироскопы (дусы) 6) Твердотельные волновые гироскопы (дусы) - фужер. 7) Вибрационный гироскоп (дус) – ножка камертона с частотой колебаний, а амплитуда пропорциональна угловой скорости платформы. 8) Микромеханические (микро 7) 9) Гироскопы с неконтактным подвесом – реализуется состояние левитации с электростатическим подвесом, и электромагнитным подвесом. Измерение , , Для измерения проекций скорости движения ПА на его связанные оси применяют гидроакустический метод. Используют эффект Доплера реверберационных сигналов в ближней зоне ПА.(см. ФМП)

 – продольная дальность;
– продольная дальность; – поперечная дальность;
– поперечная дальность; – глубина (высота) движения;
– глубина (высота) движения; – угол дифферента;
– угол дифферента; - угол курса;
- угол курса; – угол крена.
– угол крена. углы
углы  и осями системы координат
и осями системы координат  , оси которой параллельны стартовой системе
, оси которой параллельны стартовой системе  . Эти девять косинусов называются направляющими косинусами. Количество направляющих косинусов для однозначного описания произвольного углового положения аппарата избыточно. Из теоретической механики известно, что минимальное значение числа параметров полностью определяющих угловое положением ДСА в пространстве равно четырем. В качестве примера можно привести параметры Родрига-Гамильтона.
. Эти девять косинусов называются направляющими косинусами. Количество направляющих косинусов для однозначного описания произвольного углового положения аппарата избыточно. Из теоретической механики известно, что минимальное значение числа параметров полностью определяющих угловое положением ДСА в пространстве равно четырем. В качестве примера можно привести параметры Родрига-Гамильтона. ,
,  ,
,  – угловые скорости движения ДСА вокруг связанных осей.
– угловые скорости движения ДСА вокруг связанных осей. - скорость полюса аппарата,
- скорость полюса аппарата, - угол атаки аппарата,
- угол атаки аппарата, - угол дрейфа или скольжения.
- угол дрейфа или скольжения. ,
,  ,
,  .
.
 остается постоянной за исключением моментов времени, в который происходит изменение роста частоты на уменьшение и наоборот (см. нижний рисунок). От смесителя
остается постоянной за исключением моментов времени, в который происходит изменение роста частоты на уменьшение и наоборот (см. нижний рисунок). От смесителя 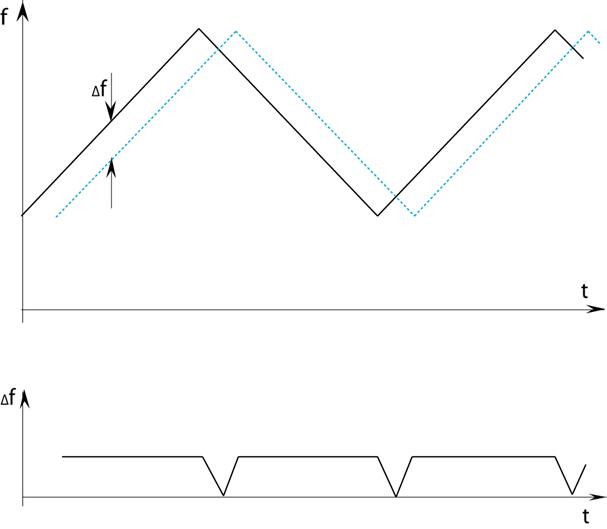
 принятого сигнала преобразуется в электрический сигнал разностной частоты
принятого сигнала преобразуется в электрический сигнал разностной частоты  - курса,
- курса,  - дифферента (тангажа),
- дифферента (тангажа),  - крена. В настоящее время текущие значения углов курса, дифферента и крена ДСА получают при помощи:
- крена. В настоящее время текущие значения углов курса, дифферента и крена ДСА получают при помощи: .
.
 , где .
, где .  - момент инерции ротора относительно оси вращения,
- момент инерции ротора относительно оси вращения,  - угловая скорость вращения ротора относительно оси вращения. Кинитический момент - векторная величина. Основное свойство свободного гироскопа будем рассматривать в рамках прецессионной теории гироскопа. (не будем рассматривать высокочастотные колебания в гироскопе -нутацию). Пусть трение в осях карданова подвеса ничтожно мало.
- угловая скорость вращения ротора относительно оси вращения. Кинитический момент - векторная величина. Основное свойство свободного гироскопа будем рассматривать в рамках прецессионной теории гироскопа. (не будем рассматривать высокочастотные колебания в гироскопе -нутацию). Пусть трение в осях карданова подвеса ничтожно мало. , то внешняя рамка останется неподвижной, а внутренняя рамка станет вращаться с постоянной угловой скорость вокруг оси Z –
, то внешняя рамка останется неподвижной, а внутренняя рамка станет вращаться с постоянной угловой скорость вокруг оси Z –  . Угловая скорость
. Угловая скорость  . Вектор
. Вектор  и вектор
и вектор  , то внутренняя рамка останется неподвижной, а внешняя рамка станет вращаться с постоянной угловой скорость вокруг оси X –
, то внутренняя рамка останется неподвижной, а внешняя рамка станет вращаться с постоянной угловой скорость вокруг оси X –  . Угловая скорость
. Угловая скорость  . Вектор
. Вектор 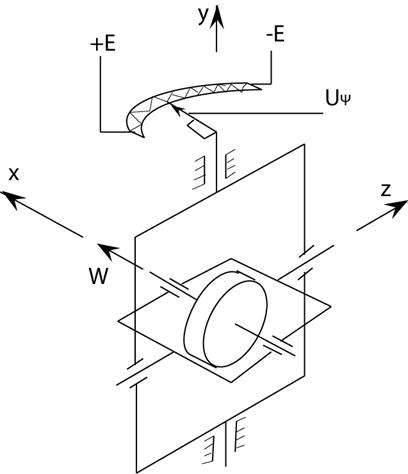
 и
и  приведен на нижеследующем рисунке. Кинитический момент волчка гироскопа располагают вертикально. Внешняя рамка гироскопа располагается горизонтально. Ось вращения внешней рамки направляют вдоль связанной с аппаратом оси Х. На оси вращения внешней рамки закреплена внутренняя часть датчика угла крена (обычно индукционный датчик). Внешняя часть датчика угла крена закреплена на корпусе прибора. Внутреннюю рамку располагают вертикально , а ось ее вращения совпадает с осью Z. Ось вращения внутренней рамки в подшипниках закрепляют на внешней рамке. На оси вращения внутренней рамки закреплена внутренняя часть датчика угла дифферента (обычно вращающийся трансформатор). Внешняя часть датчика угла дифферента закреплена на внешней рамке прибора. Таким образом датчик угла крена измеряет угол между плоскость внешней рамки и горизонтальной
приведен на нижеследующем рисунке. Кинитический момент волчка гироскопа располагают вертикально. Внешняя рамка гироскопа располагается горизонтально. Ось вращения внешней рамки направляют вдоль связанной с аппаратом оси Х. На оси вращения внешней рамки закреплена внутренняя часть датчика угла крена (обычно индукционный датчик). Внешняя часть датчика угла крена закреплена на корпусе прибора. Внутреннюю рамку располагают вертикально , а ось ее вращения совпадает с осью Z. Ось вращения внутренней рамки в подшипниках закрепляют на внешней рамке. На оси вращения внутренней рамки закреплена внутренняя часть датчика угла дифферента (обычно вращающийся трансформатор). Внешняя часть датчика угла дифферента закреплена на внешней рамке прибора. Таким образом датчик угла крена измеряет угол между плоскость внешней рамки и горизонтальной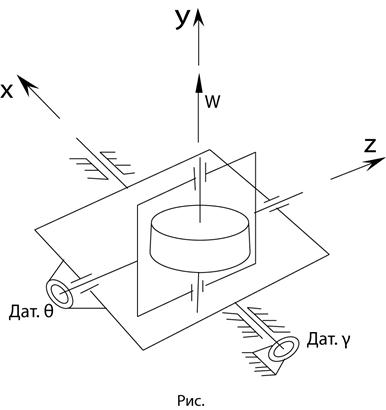
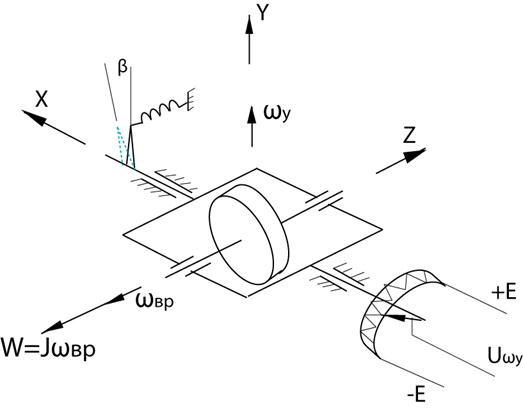
 не станет равным моменту от упругой пружины. Угол, на который повернется ось рамки, растянув (или сжав) пружину, будет пропорционален
не станет равным моменту от упругой пружины. Угол, на который повернется ось рамки, растянув (или сжав) пружину, будет пропорционален