Исполнительными органами СУ траекторией движения ДСА являются рулевые привода. Рулевой привод преобразует слабый управляющий сигнал из СУтд в физическое отклонение руля (высоты, курса, элеронов). В настоящее время в подавляющем числе случаев на ДСА используются линейные рулевые привода. В линейном рулевом приводе угол отклонения руля прямо пропорционален управляющему сигналу от СУ. Линейность соблюдается в некотором заданном диапазоне управляющего сигнала. При превышении управляющего сигнала зоны линейности руль не реагирует на управляющий сигнал. Структурная схема линейного рулевого привода приведена ниже. Рулевой привод состоит: из рулевой машинки РМ , преобразующей подаваемый на нее электрический сигнал в отклонение руля с привлечение того или иного вида энергии, потенциометра обратной связи ПОС, преобразующего фактическое положение руля в электрический сигнал, возможно наличие устройства коррекции УК, разностного устройства (сумматора ), формирующего разность между управляющим сигналом от СУ и сигналом от ПОС, усилителя мощности разностного сигнала УМ. Работает рулевой привод следующим образом. Пусть в начале работы . Тогда . Управляющий сигнал от СУ проходит через сумматор ,усиливается УМи поступает на РМ. Выходной шток или вал РМ начнет перемещаться до тех пока сигнал на входе РМ не станет равным нулю или шток РМ не достигнет упора. Остановится перемещение штока РМ при , т.е. при . Таким образом руль отклонится на величину пропорциональную управляющему сигналу. Устройство коррекции УК применяют для улучшения динамических свойств рулевого привода. При использовании на борту ЛА БЦВМ структура рулевого привода приведена ниже. Управляющий сигнал в цифровом виде поступает в блок управления рулевыми приводами, конкретно на контроллер управления рулевыми приводами. Контроллер осуществляет функцию взаимодействия с БЦВМ и поочередную обработку информации для каждого ( обычно четырех) рулевого привода (формирование разностного сигнала, коррекции). В блоке есть два коммутатора поочередно подключающих к контроллеру разные рулевые привода. Также присутствует АЦП и ЦАП.
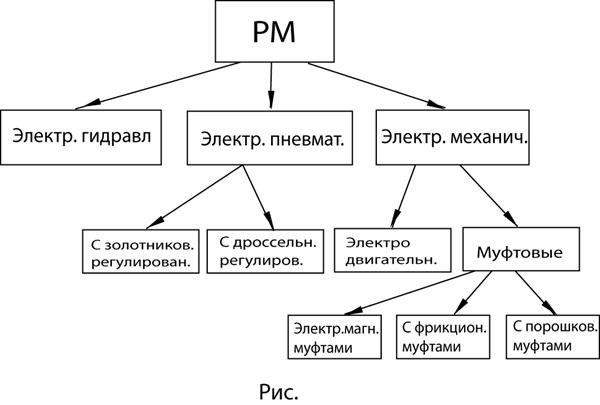
Типы рулевых приводов. Классифицируются рулевые привода по типу энергии подводимой для силового использования привода. См. рисунок.
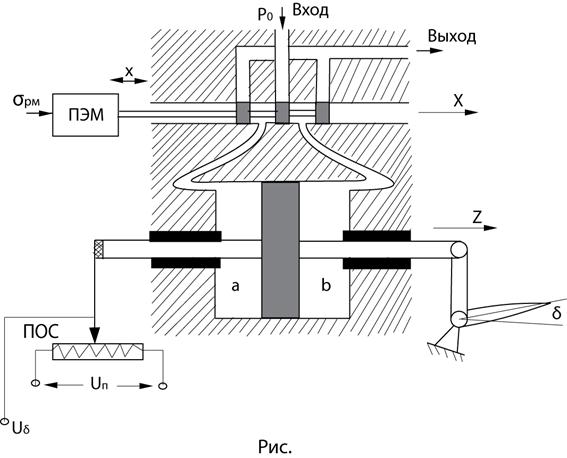
В настоящее время в соответствии с типами РП на рисунке используются три типа энергии для рулевых приводов. Это энергия жидкости находящейся под давлением. В этом случае на борту аппарата должен быть резервуар для жидкости находящейся под давлением, резервуар для жидкости, отдавшей энергию приводу и насос накачивающий жидкость в резервуар под давлением. Это энергия газа находящегося под давлением. На аппарате газ под давлением содержится либо в баллонах, закачиваемых при подготовке аппарата, либо газ под давлением вырабатывается в газогенераторах при сжигании твердого топлива, либо используется давление воздуха набегающего потока. И третий вид энергии это электрическая энергия. На борту используется электроэнергия либо от аккумуляторов, либо от бортовых электрогенераторов. Далее РП классифицируется по типу устройства, управляющего газом или жидкостью под давлением. Электрический РП подразделяется на электродвигательный и муфтовый. Муфтовый РП классифицируется по типу используемой муфты. Коротко рассмотрим каждый РП. Начнем с электрогидравлического РП. Схематическое устройство электрогидравлической РМ приведено на нижеследующем рисунке. Устройство и принцип работы электрогидравлической РМ. Силовым элементом, преобразующим энергию жидкости под давлением в механическую энергию, является цилиндр с поршнем. Шток поршня с одной стороны через рычажный механизм отклоняет руль, с другой стороны перемещает ползунок потенциометра обратной связи ПОС на величину, пропорциональную углу отклонения руля. С ползунка потенциометра снимается напряжение эквивалентное углу отклонения руля. Управляет подачей жидкости в пространство силовой цилиндр- поршень механизм , называемый золотник. На рисунке он изображен над силовым цилиндром. Золотник состоит из цилиндра, существенно меньшего по диаметру чем силовой цилиндр и специальной формы поршня, (например, силовой -50мм, золотник – 3мм.). Поршень золотника состоит из трех частей, размещенных на одном штоке. На поверхности цилиндра золотника имеются пять отверстий.
К центральному верхнему отверстию подводится рабочая жидкость под давлением. Левое и правое верхние отверстия объединены, и через них сливается в дренажную емкость отработавшая жидкость. Левое нижнее отверстие в цилиндре золотника соединена с полостью а силового цилиндра. Правое нижнее отверстие в цилиндре золотника соединена с полостью b силового цилиндра. Шток золотника соединен с выходом поляризованного электромагнита ПЭМ. ПЭМ перемещает шток золотника пропорционально сигналу , поступающему на электромагнит. Принцип работы РМ состоит в следующем. В исходном положении, изображенном на рисунке, золотник находится в положении, когда каналы подвода жидкости под давлением и слива жидкости перекрыты. Ход золотника обозначим величиной (+ вправо). Подадим сигнал , пусть при этом шток золотника переместится вправо . Откроется доступ жидкости под давлением в полость а.Из полости bоткроется доступ на дренаж. Силовой поршень начнет перемещаться вправо до тех пока поршень золотника не перекроет верхние отверстия , или пока поршень силового цилиндра не дойдет до упора. Чем больше был перемещен поршень золотника, тем больше была площадь проходных отверстий в золотнике, тем быстрее перемещался поршень силового цилиндра. Что может сделать . Это сигнал ПЭМ . Согласно первому рисунку темы . Отсюда следует , или как только руль отклониться на величину рулевая машинка перестанет отклонять руль. Что нам и требуется. Аналогичная картина получается при . Рассмотрим динамические свойства электрогидравлического рулевого привода. Движение РМ при ряде значительных упрощающих допущений может быть описана следующим дифференциальным уравнением. , (9.1) где - нормированное перемещение золотника , - максимальная угловая скорость отклонения руля при полностью открытом золотнике и ненагруженной РМ, , где - передаточное отношение от хода штока силового поршня к углу отклонения руля, - площадь сечения силового поршня, - максимальный расход жидкости, , - коэффициент расхода, - максимальная площадь проходного отверстия золотника. Подставляя в ДУ РМ выражение для получим , подставляя получим (9.2) Записывая это ДУ в преобразовании Лапласа получим . Передаточная функция от к будет иметь вид . Структура передаточной функции, а именно наличие единственной компоненты зависящей от вида говорит о том, что РМ от входа ПЭМ к углу отклонения руля представляет интегрирующее звено с масштабным коэффициентом . При подаче от СУ на ПЭМ сигнала в виде скачка (см. рис.) руль будет отклоняться в виде линейной функции (интеграл от константы). При обнулении входного сигнала руль останется в состоянии, которое наинтегрировалось к моменту обнуления сигнала..
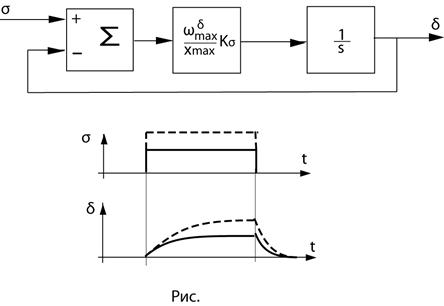
Ситуация совершенно измениться, если на вход ПЭМ подать разность сигнала от СУ и от ПОС РМ, как показано на рис.
Такое включение РМ называется включение с обратной связью, а систему называю РП. ДУ РП получим , заменив в ДУ (9.2) . (9.3) Передаточная функция от управляющего сигнала от СУ к углу отклонения руля примет вид , где . Это передаточное звено называют инерционным с постоянной времени . Зависимость выходного сигнала от скачкообразного входного для инерционного звена приведена на рисунке. В первом приближении такой характер зависимости выходной переменной от входной присущ практически всем рулевым приводам. Полная математическая модель РП представляет систему нелинейных дифференциальных уравнений не решаемых аналитически. Путем линеаризации удается получить более точные линейные уравнения движения привода чем приведенные выше. Приведем линейные дифференциальные уравнения гидравлической РМ, учитывающей нагрузку на руль (шарнирный момент, трение, инерционные силы, момент от скорости перекладки руля). Без учета сжимаемости жидкости эти уравнения имеют вид. , (9.4) где - давление в магистрали жидкости, - перепад давления на поршне, - площадь поршня, , - момент приложенный из вне к рулям. Уравнение (9.4) дополняют уравнением для (9.5) Выражение связывает уравнения (9.4) и (9.5). Система (9.4) и (9.5) используется в модели РП с обратной связью. Рассмотрим электропневматический рулевой привод. Конструкция электропневматического рулевого привода с золотниковым распределительным механизмом в большей части совпадает с гидравлическим рулевым приводом. Упрощенное ДУ пневматической РМ также совпадает с гидравлической РМ, т.е. . Однако степень приближения описания этим ДУ движения реальной РМ еще меньше чем для гидравлической РМ, т.к. газ сжимается и расширяется значительно в большей степени чем жидкость. Более точная модель пневматической РМ, учитывающая упругие свойства газа, имеет следующий вид. , (9.6) где - перепад давлений на поршне, , . Уравнение (9.6) следует дополнить ДУ для момента действующего на рули (9.5) и связью . Электродвигательный рулевой привод. В этом приводе в качестве силового элемента используется электрический двигатель. На одну обмотку двигатель постоянно подается напряжение электропитания. На другую обмотку подается усиленное управляющее напряжение, позволяющее двигателю вращаться быстро или медленно, в одну или другую сторону. Вал электродвигателя через редуктор связан с осью руля. На выходном валу редуктора размещен потенциометр обратной связи, позволяющий реализовать систему с обратной связью. Структурная схема электродвигательного рулевого привода приведена ниже.
Управляющий сигнал от СУ и сигнал обратной связи поступают на разностное устройство. На выходе разностного устройства образуется сигнал ошибки . Сигнал ошибки показывает на сколько и в какую сторону фактическое положение руля отличается от требуемого СУ. После усиления сигнал ошибки подается на управляющую обмотку электродвигателя. Двигатель вращается в сторону уменьшения сигнала ошибки. Как только сигнал ошибки станет равным нулю двигатель перестанет вращаться. В разомкнутом виде (когда нет обратной связи) динамические свойства РМ в основном определяются динамическими свойствами двигателя. Упрощенную передаточную функцию разомкнутой электродвигательной РМ можно записать как где постоянная времени электродвигателя, определяемая моментом инерции его ротора. Структурно электродвигательную разомкнутую РМ и ее реакцию на скачкообразный управляющий сигнал можно изобразить следующим образом.
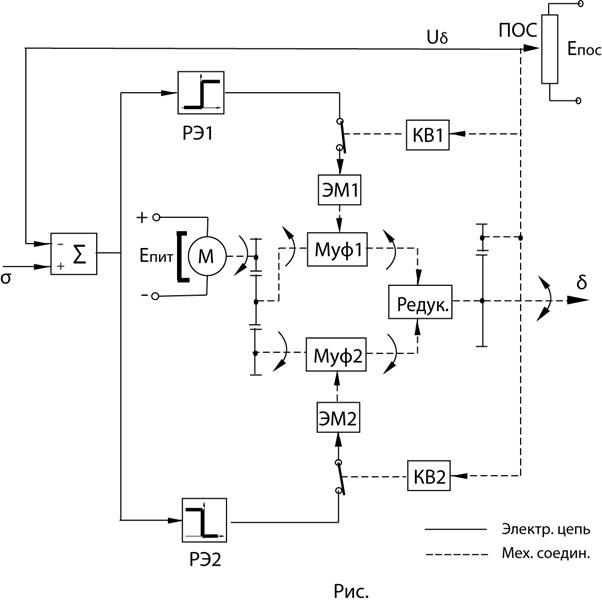
При замыкании РМ обратной связью без КУ передаточная функция РП будет иметь второй порядок. Корни характеристического уравнения могут быть как действительными отрицательными, так и комплексно сопряженными с отрицательными действительными частями в зависимости от инерционности двигателя и коэффициента усиления РМ. При комплексно сопряженных корнях характеристического уравнения применяют корректирующее устройство КУ для улучшения качества переходных процессов в РП. Рассмотрим электромеханический фрикционный РП. Функциональная схема фрикционного РП приведена ниже. Работает этот привод следующим образом. 1) При появлении бортового электропитания Епитначинает вращаться электродвигатель М . Он вращается в одном направлении все время полета ЛА. 2) Если и , то оба электромагнита ЭМ1 и ЭМ2 выключены, муфты Муф1 и Муф2 разомкнуты, и вращательное движение от электродвигателя не передается на редуктор Редук. и далее на выходной вал отклонения руля. 3) При подаче на вход привода положительного управляющего сигнала включится электромагнит ЭМ1 ,замкнется муфта Муф1,и вращательное движение от электродвигателя через муфту Муф1и редуктор будет передаваться на выходной вал, отклоняя руль в положительную сторону. При подаче на вход привода отрицательного управляющего сигнала включится электромагнит ЭМ2, замкнется муфта Муф2,и вращательное движение от электродвигателя через муфту Муф2и редуктор будет передаваться на выходной вал, отклоняя руль в отрицательную сторону. 4) При изменении угла отклонения руля перемещается ползунок потенциометра обратной связи ПОС, изменяя напряжение . Как только станет равным , т.е. , электромагнит ЭМ1илиЭМ2выключится , муфта 1 или 2 разомкнется, и вращательное движение на выходной вал не будет передаваться. Руль остановится в положении , что и требовалось ( за счет зоны нечувствительности релейных элементов РЭ1, РЭ2).
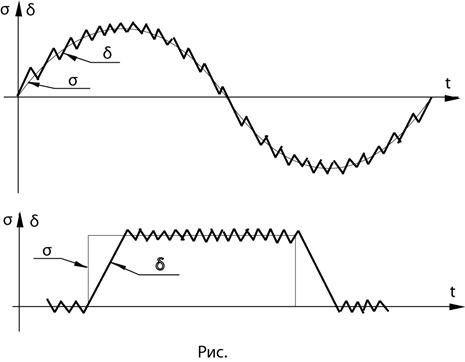
5) Максимальное отклонение руля контролируется концевыми выключателями КВ1 или КВ2 путем прекращения подачи сигнала от релейного элемента на электромагнит. Механическое ограничение угла отклонения руля на этом РП недопустимо т.к это может привести к разрушению привода (редуктор, муфта, двигатель). При работе фрикционного рулевого привода руль совершает малые частые колебания относительно значения управляющего сигнала , как показано на следующем рисунке. Фактически за счет упругости механических связей эти колебания частично сглаживаются в приводе и полностью отфильтровываются самим ЛА, как значительно более инерционным объектом чем РМ. Основное преимущество электрофрикционного рулевого привода по сравнению с электродвигательным это высокое быстродействие, приближающееся к электропневматическому РП. Однако в настоящее время проводятся разработки мощных малоинерционных электродвигателей переменного тока, и возможно появление быстродействующего электродвигательного РП как более простой альтернативы электрофрикционному РП. Основные требования, предъявляемые к РП сводятся к следующему 1) Функциональные требования. а) Усилие, развиваемое РП при заданной скорости перекладки руля. б) Скорость перекладки руля при заданном усилии (момента) 2) Габаритно-весовые характеристики и энергопотребление. 3) Эксплуатационные характеристики: надежность работы, условия хранения, условия эксплуатации

 ), формирующего разность между управляющим сигналом от СУ и сигналом от ПОС, усилителя мощности разностного сигнала УМ.
), формирующего разность между управляющим сигналом от СУ и сигналом от ПОС, усилителя мощности разностного сигнала УМ. . Тогда
. Тогда  . Управляющий сигнал от СУ проходит через сумматор
. Управляющий сигнал от СУ проходит через сумматор 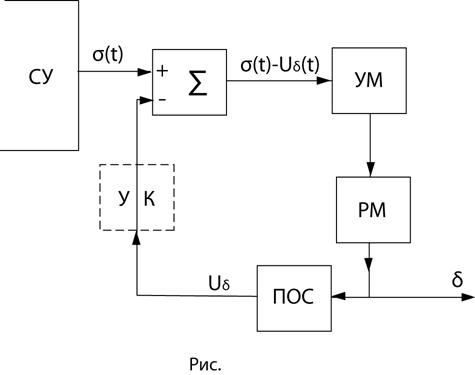
 , т.е. при
, т.е. при  . Таким образом руль отклонится на величину пропорциональную управляющему сигналу. Устройство коррекции УК применяют для улучшения динамических свойств рулевого привода.
. Таким образом руль отклонится на величину пропорциональную управляющему сигналу. Устройство коррекции УК применяют для улучшения динамических свойств рулевого привода.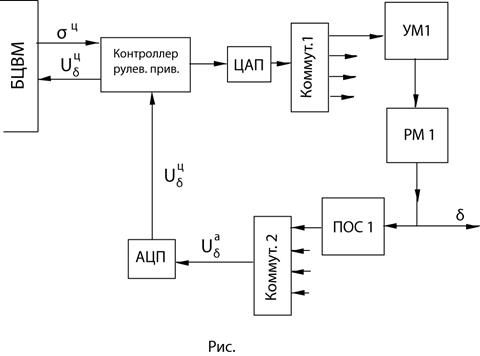
 , поступающему на электромагнит.
, поступающему на электромагнит. (+ вправо). Подадим сигнал
(+ вправо). Подадим сигнал  , пусть при этом шток золотника переместится вправо
, пусть при этом шток золотника переместится вправо  . Откроется доступ жидкости под давлением в полость а.Из полости bоткроется доступ на дренаж. Силовой поршень начнет перемещаться вправо до тех пока поршень золотника не перекроет верхние отверстия
. Откроется доступ жидкости под давлением в полость а.Из полости bоткроется доступ на дренаж. Силовой поршень начнет перемещаться вправо до тех пока поршень золотника не перекроет верхние отверстия  , или пока поршень силового цилиндра не дойдет до упора. Чем больше был перемещен поршень золотника, тем больше была площадь проходных отверстий в золотнике, тем быстрее перемещался поршень силового цилиндра.
, или пока поршень силового цилиндра не дойдет до упора. Чем больше был перемещен поршень золотника, тем больше была площадь проходных отверстий в золотнике, тем быстрее перемещался поршень силового цилиндра. . Это сигнал ПЭМ
. Это сигнал ПЭМ  . Согласно первому рисунку темы
. Согласно первому рисунку темы  . Отсюда следует
. Отсюда следует  , или как только руль отклониться на величину
, или как только руль отклониться на величину  рулевая машинка перестанет отклонять руль. Что нам и требуется. Аналогичная картина получается при
рулевая машинка перестанет отклонять руль. Что нам и требуется. Аналогичная картина получается при  .
. , (9.1)
, (9.1) - нормированное перемещение золотника
- нормированное перемещение золотника  ,
, - максимальная угловая скорость отклонения руля при полностью открытом золотнике и ненагруженной РМ,
- максимальная угловая скорость отклонения руля при полностью открытом золотнике и ненагруженной РМ, , где
, где  - передаточное отношение от хода штока силового поршня к углу отклонения руля,
- передаточное отношение от хода штока силового поршня к углу отклонения руля, - площадь сечения силового поршня,
- площадь сечения силового поршня,  - максимальный расход жидкости,
- максимальный расход жидкости,  ,
,  - коэффициент расхода,
- коэффициент расхода,  - максимальная площадь проходного отверстия золотника.
- максимальная площадь проходного отверстия золотника. получим
получим , подставляя
, подставляя  получим
получим  (9.2)
(9.2) .
. к
к  будет иметь вид
будет иметь вид .
.
 вида
вида  говорит о том, что РМ от входа ПЭМ к углу отклонения руля представляет интегрирующее звено с масштабным коэффициентом
говорит о том, что РМ от входа ПЭМ к углу отклонения руля представляет интегрирующее звено с масштабным коэффициентом  . При подаче от СУ на ПЭМ сигнала
. При подаче от СУ на ПЭМ сигнала  в виде скачка (см. рис.) руль будет отклоняться в виде линейной функции (интеграл от константы). При обнулении входного сигнала руль останется в состоянии, которое наинтегрировалось к моменту обнуления сигнала..
в виде скачка (см. рис.) руль будет отклоняться в виде линейной функции (интеграл от константы). При обнулении входного сигнала руль останется в состоянии, которое наинтегрировалось к моменту обнуления сигнала..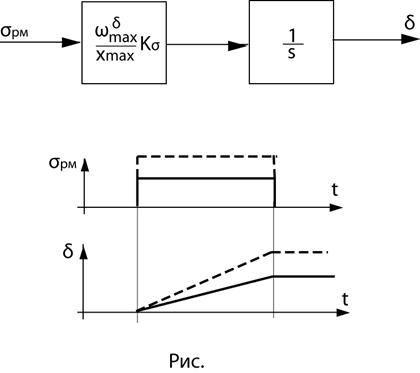
 .
. (9.3)
(9.3) ,
,  .
. . Зависимость выходного сигнала
. Зависимость выходного сигнала  от скачкообразного входного
от скачкообразного входного  для инерционного звена приведена на рисунке.
для инерционного звена приведена на рисунке. , (9.4)
, (9.4) - давление в магистрали жидкости,
- давление в магистрали жидкости, - перепад давления на поршне,
- перепад давления на поршне, - площадь поршня,
- площадь поршня,  ,
,  - момент приложенный из вне к рулям.
- момент приложенный из вне к рулям. (9.5)
(9.5) связывает уравнения (9.4) и (9.5). Система (9.4) и (9.5) используется в модели РП с обратной связью.
связывает уравнения (9.4) и (9.5). Система (9.4) и (9.5) используется в модели РП с обратной связью. , (9.6)
, (9.6) - перепад давлений на поршне,
- перепад давлений на поршне, ,
,  .
.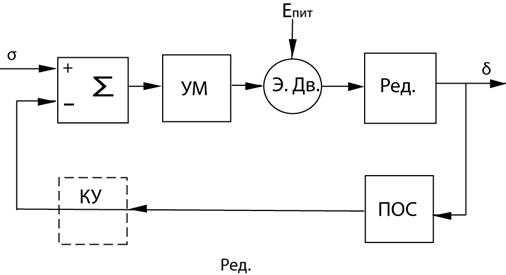
 от СУ и сигнал обратной связи
от СУ и сигнал обратной связи  поступают на разностное устройство. На выходе разностного устройства образуется сигнал ошибки
поступают на разностное устройство. На выходе разностного устройства образуется сигнал ошибки  . Сигнал ошибки показывает на сколько и в какую сторону фактическое положение руля отличается от требуемого СУ. После усиления сигнал ошибки подается на управляющую обмотку электродвигателя. Двигатель вращается в сторону уменьшения сигнала ошибки. Как только сигнал ошибки станет равным нулю двигатель перестанет вращаться.
. Сигнал ошибки показывает на сколько и в какую сторону фактическое положение руля отличается от требуемого СУ. После усиления сигнал ошибки подается на управляющую обмотку электродвигателя. Двигатель вращается в сторону уменьшения сигнала ошибки. Как только сигнал ошибки станет равным нулю двигатель перестанет вращаться.
 постоянная времени электродвигателя, определяемая моментом инерции его ротора. Структурно электродвигательную разомкнутую РМ и ее реакцию на скачкообразный управляющий сигнал можно изобразить следующим образом.
постоянная времени электродвигателя, определяемая моментом инерции его ротора. Структурно электродвигательную разомкнутую РМ и ее реакцию на скачкообразный управляющий сигнал можно изобразить следующим образом.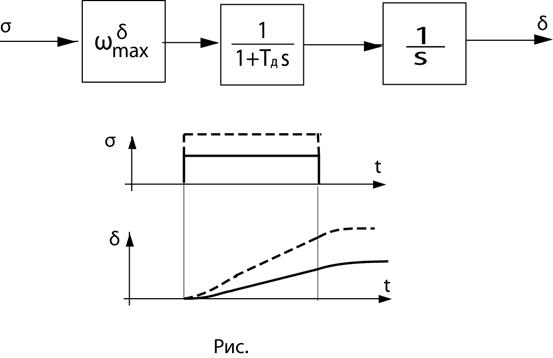
 и
и  , то оба электромагнита ЭМ1 и ЭМ2 выключены, муфты Муф1 и Муф2 разомкнуты, и вращательное движение от электродвигателя не передается на редуктор Редук. и далее на выходной вал отклонения руля.
, то оба электромагнита ЭМ1 и ЭМ2 выключены, муфты Муф1 и Муф2 разомкнуты, и вращательное движение от электродвигателя не передается на редуктор Редук. и далее на выходной вал отклонения руля. включится электромагнит ЭМ1 ,замкнется муфта Муф1,и вращательное движение от электродвигателя через муфту Муф1и редуктор будет передаваться на выходной вал, отклоняя руль
включится электромагнит ЭМ1 ,замкнется муфта Муф1,и вращательное движение от электродвигателя через муфту Муф1и редуктор будет передаваться на выходной вал, отклоняя руль  в положительную сторону.
в положительную сторону. . Как только
. Как только  , электромагнит ЭМ1илиЭМ2выключится , муфта 1 или 2 разомкнется, и вращательное движение на выходной вал не будет передаваться. Руль остановится в положении
, электромагнит ЭМ1илиЭМ2выключится , муфта 1 или 2 разомкнется, и вращательное движение на выходной вал не будет передаваться. Руль остановится в положении  , что и требовалось (
, что и требовалось (  за счет зоны нечувствительности релейных элементов РЭ1, РЭ2).
за счет зоны нечувствительности релейных элементов РЭ1, РЭ2).