Современное проектирование бортовых автоматических систем (БАС) , отдельных приборов, устройств и подсистем подчинено идее единого (интегрированного) комплекса (ИБАС). Бортовые комплексы автоматических систем ДСА представляют собой системы функционирующие в различных условиях и ситуациях, определяемых состоянием внешней среды, внутренним состоянием систем и аппарата в целом. Представим состав БАС с точки зрения информационных систем. В состав бортовых автоматических комплексов с информационной точки зрения входят объекты управления и управляющие системы. Объектами управления являются рулевые органы, двигатели, средства разгона и торможения, различные исполнительные органы и т.д.
Рис.5
Элементами управляющих систем являются датчики информации о внешней среде, о состоянии бортовых систем и положении аппарата в пространстве, преобразователи информации, каналы связи и бортовые цифровые вычислительные машины (БЦВМ). Отметим, что их может быть несколько – одна центральная и несколько периферийных. Графически состав БАС приведен на рис.
Перечислим основные свойства интегрированных комплексов бортовых автоматических систем (КБАС):
1. КБАС имеют входные параметры и выходные параметры.
2. КБАС обладают состоянием и функциями перехода состояний. Состояние определяется значениями входных переменных в текущий момент и вообще за все предыдущее время сеанса функционирования.
3. КБАС бывают дискретные и непрерывные.
4. КБАС могут иметь как детерминированные, так и случайные параметры.
5. Для КБАС характерна сложная структура.
6. КБАС обладают многокритериальностью оценок.
7. Современные КБАС должны быть способны к реконфигурации в зависимости от режимов и условий движения ДСА.
8.Современные КБАС должны обладать элементами искусственного интеллекта.
Отметим характерные черты процесса создания современных КБАС.
1. Процесс создания комплекса БАС является длительным и итерактивным процессом.
2. Процесс создания комплекса БАС включает ряд последовательных этапов, начиная от предварительного проектирования и кончая эксплуатацией.
3. Каждый из этапов реализует последовательность фаз разработки, таких как: постановка задачи, решение задачи, оценка и принятие решения о результатах выполнения задачи.
4. На этапах разработки КБАС используются различные математические методы и модели. Большая их часть использует для реализации ЦВМ.
5. На этапах технического проектирования и отработки, наряду с математическими методами, используются методы имитационного моделирования, полунатурного моделирования и натурной отработки.
Каждый этап создания КБАС отличается определенным уровнем проработки и познания будущей системы. С каждым этапом этот уровень растет. В чем это заключается: 1) корректируется формулировка задачи, 2) повышается уровень адекватности моделей, 3) снижается степень неопределенности значений параметров, 4) обеспечивается реализуемость системы, 5) исключается несовместимость функций и параметров, 6) устраняется субъективность оценок качества системы.
Такая методика связана со значительными материальными и временными затратами. Для рационального процесса проектирования БАС, повышения качества создаваемых БАС используется процедура, называемая комплексирование БАС.
Комплексирование – это проектная процедура, которая позволяет совмещать и оптимизировать: 1) общесистемные, информационно-алгоритмические и технические ресурсы; 2) физические процессы; 3) эксплуатационные и организационные мероприятия.
Цель комплексирования – создание на базе современной технологии высокоэффективных бортовых автоматических комплексов. Эти комплексы должны удовлетворять требованиям совместимости подсистем, должны быть способными переносить неблагоприятное влияние различных факторов, должны использовать в управлении возможности искусственного интеллекта при реализации различных видов поведения (программируемого, адаптивного, импровизационного). Все это должно выполняться с помощью различных способов энергетического, информационного и механического взаимодействия комплексов с различной внешней средой.
Предметом комплексирования является как комплекс в целом, так и функции, алгоритмы, датчики информации, БЦВМ и программы, каналы связи, конструктивные элементы, физические процессы (электрические, электронные, тепловые, механические, …), а также эксплуатационные и организационные процедуры. Рассмотрим принципы комплексирования (из чего состоит процедура комплексирования). Принципы комплексирования формулируются на предварительных этапах проектирования. Принципы комплексирования определяют функциональные, алгоритмические и технические особенности реализации КБАС.
Принципы комплексирования включают:
1) формирование структуры (структурирование) комплекса;
2) организацию алгоритмического и программного обеспечения;
3) организацию управления и контроля КБАС;
4) организацию информационного взаимодействия элементов комплекса;
5) техническую реализацию;
6) стандартизацию и унификацию элементов КБАС.
Рассмотрим подробнее каждый принцип комплексирования.
1. Формирование структуры (структурирование) комплекса включает в себя два компонента. Первый - определение состава и распределение функций между элементами комплекса. Второй – формирование иерархического характера построения комплекса. Выделяют основные три уровня иерархического построения комплекса: нижний – первичного физического и функционального преобразования информации; средний – комплексной обработки информации и управления; верхний – прогноза, планирования и организации поведения. Трехуровневому характеру построения комплекса соответствует трехуровневая аппаратурно-функциональная организация комплекса.
Первый уровень образуют информационные и исполнительные элементы – например, датчики глубины или высоты, датчики углов ДСА (гироскопы), гидроакустические преобразователи и т.д.; исполнительные элементы – это рулевые машинки, пиропатроны, клапана, запалы.
Второй уровень – информационно-исполнительные системы. Это системы, которые по определенному алгоритму на основе информации с датчиков вырабатывают сигналы на функционирование исполнительных элементов.
Третий уровень – информационно-управляющие системы. Это системы, которые на основе всей или части значений датчиков первичной информации могут менять алгоритмы для второго уровня.
На каждом уровне могут использоваться или не использоваться БЦВМ соответствующей комплектации и производительности.
2. Второй принцип комплексирования - организация алгоритмического и программного обеспечения.Она включает в себя следующие положения:
1) необходима иерархия построения уровней алгоритмической организации в соответствии с организацией общей структуры;
2) необходима управляемость и технологичность алгоритмов, возможность их локальных изменений;
3) необходима модульность алгоритмического и программного обеспечения;
4) необходима минимальная разветвленность и унификация алгоритмов.
3. Третий принцип комплексирования - организация управления и контроля КБАС. К нему относится 1) использование иерархической системы управления режимами работы; 2) централизация средств управления. Реализация этих двух положений возможна на базе разделения функций управления и контроля в соответствии с иерархической организацией структуры КБАС.
На высшем уровне должны решаться задачи распознавания и анализа ситуаций. Далее решаются задачи управления общими режимами работы. Затем задачи контроля, визуализации и документирования (по необходимости). Решение этих задач может осуществляться при участии оператора.
4. Следующий принцип комплексирования – организация информационного взаимодействия элементов комплекса. В соответствии с этим принципом должно быть обеспечено требование по скорости передачи, помехоустойчивости, гибкости и унификации связей. Вес приемо-передающей аппаратуры и кабельных соединений должен быть минимальным. Этим требованиям в наибольшей степени удовлетворяет принцип цифрового обмена с использованием проводных линий связи. Целесообразна не менее чем двухуровневая организация структуры системы информационного обмена.
Канал верхнего уровня – межсистемный. Он осуществляет интеграцию комплекса в целом, т.е. обеспечивает связь информационно-исполнительных систем с системами управления комплексом.
Локальный канал нижнего уровня обеспечивает информационный обмен в информационно-исполнительных системах.
Организация локального канала связи в информационно-исполнительной системе определяется на основе анализа загрузки канала верхнего уровня, на основе анализа размещения подблоков, на основе требований к живучести и автономности систем, а также учитывается целесообразность осуществления информационного обмена в цифровой форме между элементами системы.
И, наконец, последние два принципа комплексирования - техническая реализация, стандартизация и унификация элементов КБАС.
Эти два принципа требуют
- модульности построения систем и конструкций;
- использования стандартных интерфейсов в источниках и приемниках информации;
- универсализации и унификации аппаратуры;
- использования ряда совместных БЦВМ с модульной структурой и конструкцией;
- максимально возможной унификации информационно-исполнительных систем.
Моделирование процессов функционирования КБАС
Изложенные принципы комплексирования представляют не более чем задание на комплексирование бортовой автоматической системы (БАС). Эти принципы состоят из нескольких пунктов (шести), начиная от формирования структуры (п.1) и кончая стандартизацией и унификацией элементов КБАС. Но как реализовать эти принципы, как проследить (проанализировать) взаимное влияние различных параметров КБАС, как устранить противоречия между значениями различных параметров?
Существенную помощь при создании бортовых автоматических систем оказывает проектная процедура, которая называется моделирование.
Под моделированием понимается замещение исследуемого объекта (оригинала) его условным образом или другим объектом (моделью) и изучение свойств оригинала путем исследования свойств модели.
При выполнении моделирования должны выполняться два условия:
1) нужно чтобы модель обеспечивала корректное (адекватное) отображение свойств оригинала, существенных с точки зрения проводимого исследования;
2) нужно чтобы модель обеспечивала проведение измерений исследуемых параметров.
Все модели в зависимости от способа реализации разделяют на два класса: физические и математические.
Физические модели предполагают, как правило, реальное воплощение тех физических свойств оригинала, которые интересуют исследователя. Например, при проектировании подводной или крылатой ракеты создается ее макет, обладающий теми же гидродинамическими или аэродинамическими характеристиками. В связи с этим физическое моделирование называют также макетированием.
Математическая модель представляет собой формализованное описание системы с помощью некоторого абстрактного языка, например в виде совокупности математических соотношений или схемы алгоритма. Вообще любое математическое выражение, в котором фигурируют физические величины, можно рассматривать как математическую модель того или иного процесса или явления. В частности уравнение представляет собой модель прямолинейного равноускоренного движения.
Принципы математического моделирования сводятся к следующим позициям:
· Принцип информационной достаточности. При полном отсутствии информации об исследуемой системе построение ее модели невозможно. При наличии полной информации о системе ее моделирование лишено смысла. Существует некоторый критический уровень априорных сведений о системе (уровень информационной достаточности), при достижении которого может быть построена ее адекватная модель.
· Принцип осуществимости. Создаваемая модель должна обеспечивать достижение поставленной цели исследования за конечное (приемлемое) время. (При статистическом моделировании задается вероятность достижения поставленной цели)
· Принцип множественности моделей. Данный принцип является ключевым. Создаваемая модель должна отражать в первую очередь те свойства реальной системы, которые влияют на исследуемые параметры. При использовании любой конкретной модели познаются лишь некоторые стороны реальности. Для более полного ее исследования необходим ряд моделей, позволяющих с разных сторон и с разной степенью детальности отражать рассматриваемый процесс.
· Принцип агрегирования. В большинстве случаев сложную систему можно представить состоящей из подсистем (агрегатов). Адекватное математическое описание подсистем естественно более простое чем всей системы и часто оказываются пригодными некоторые стандартные математические схемы. Принцип агрегирования позволяет, кроме того, достаточно гибко перестраивать модель в зависимости от задач исследования.
· Принцип параметризации. В ряде случаев моделируемая система имеет в своем составе некоторые относительно изолированные подсистемы, характеризующиеся определенным параметром, в том числе векторным. Такие подсистемы можно заменять в модели соответствующими числовыми величинами, а не описывать процесс их функционирования. При необходимости зависимость значений этих величин от ситуации может задаваться в виде таблицы, графика или аналитического выражения (формулы). Принцип параметризации позволяет сократить объем и продолжительность моделирования. Однако надо иметь ввиду, что параметризация снижает адекватность модели.
Степень реализации перечисленных принципов в каждой конкретной модели может быть различной, причем это зависит не только от желания разработчика, но и от соблюдения им технологии моделирования. А любая технология предполагает наличие определенной последовательности действий.
Остановимся на компьютерном моделировании. Компьютерное моделирование – это математическое моделирование с использованием средств вычислительной техники. Технология компьютерного моделирования предполагает выполнение следующих действий:
1) определение цели моделирования;
2) разработка концептуальной модели;
3) формализация модели;
4) программная реализация модели;
5) планирование модельных экспериментов;
6) реализация плана эксперимента;
7) анализ и интерпретация результатов моделирования.
Различают два подхода к построению математической модели при компьютерном моделировании. Один подход именуется как «аналитическое моделирование», второй именуется как «имитационное моделирование».
Аналитическое моделирование предполагает использование математической модели реального объекта в форме алгебраических, дифференциальных, интегральных и других уравнений, связывающих входные переменные с выходными, дополненных системой ограничений. При этом предполагается наличие однозначной вычислительной процедуры получения точного решения уравнений.
При имитационном моделировании используемая математическая модель воспроизводит логику (алгоритм) функционирования исследуемой системы во времени при различных сочетаниях значений параметров системы и внешней среды.
В одних случаях более предпочтительным является аналитическое моделирование, в других – имитационное (или сочетание того или другого). Для выбора типа моделирования (аналитического или имитационного) нужно выполнить две первые позиции технологии моделирования – определить цель моделирования и разработать концептуальную модель.
Цель моделирования конкретизируется исходя из общей цели исследования.
Концептуальная модель – это абстрактная модель, определяющая структуру моделируемой системы, свойства её элементов и причинно-следственные связи, присущие системе и существенные для достижения цели моделирования.
Построение концептуальной модели включает следующие этапы:
1) определение типа системы;
2) описание совокупности внешних воздействий;
3) декомпозицию системы.
На первом этапе осуществляется сбор фактических данных о моделируемой реальной системе на основе работы с литературой, технической документацией, проведении натурных экспериментов, сбора экспертной информации и т.д. Выдвигаются гипотезы относительно значений параметров и переменных, для которых отсутствует возможность получения фактических данных. Если полученные результаты соответствуют принципам информационной достаточности и осуществимости, то они могут служить основой для отнесения моделируемой системы к одному из известных типов (классов).
Укажем на некоторые классификационные признаки, по которым моделируемую систему можно отнести к тому или иному типу. Начнем с оценки множества состояний моделируемой системы. По этому признаку системы делятся на статические и динамические.
Система называетсястатической, если множество ее состояний содержит один элемент.
Система называетсядинамической, если состояний больше одного и они могут изменяться во времени.
Различают два типа динамических систем:
· с дискретными состояниями (множество состояний дискретно или счетно)
· с непрерывным множеством состояний.
Возможны смешанные случаи.
Процесс смены состояний называетсядвижением системы
Смена состояний может происходить либо в фиксированные моменты времени либо непрерывно.
Различают детерминированные системы и стохастические.
В детерминированных системах новое состояние зависит только от текущего состояния, времени и условий перехода из одного состояния в другое, т.е. можно однозначно рассчитать новое состояние.
В стохастической системе можно рассчитать лишь множество возможных состояний, в которое перейдет система в последующий момент времени, и в некоторых случаях вероятности перехода в каждое из этих состояний.
Приведенные классификационные признаки относятся к реальным системам, но могут быть применены к разрабатываемым моделям. При этом исследуемая система и ее модель могут относиться как к одному, так и к разным классам. Принадлежность реальной системы и ее модели к одному классу говорит о корректности модели, однако это является не всегда полезным для исследования, а иногда и невозможным для реализации модели.
На втором этапе рассматривается совокупность внешних воздействий (СВВ), оказывающих влияние на работу реальной системы, ее параметры, критерии качества. Описание СВВ является не только важной, но и достаточно сложной задачей. Иногда вводят понятие модели СВВ, подчеркивая сопоставимость уровня сложности описания собственно системы и ее совокупности внешних воздействий.
Модель совокупности внешних воздействий должна обладать следующими основными свойствами:
· совместимостью с моделью системы;
· представительностью;
· управляемостью;
· системной независимостью.
Свойство совместимости означает, что во-первых степень детализации описания СВВ соответствует детализации описания системы, во- вторых, модель СВВ должна быть сформулирована в тех же категориях предметной области, что и модель системы.
Представительность модели СВВ означает ее способность адекватно представить СВВ в соответствии с целями исследования, т.е . модель совокупности внешних воздействий должна отвечать целям исследования системы.
Под управляемостью СВВ понимается возможность изменения параметров модели СВВ в некотором диапазоне, определяемом целями исследования.
Системная независимость – это возможность переноса модели СВВ с одной системы на другую с сохранением ее представительности. Это свойство наиболее важно при сравнении различных систем или их модификаций.
На третьем этапе построения концептуальной модели выполняется декомпозиция системы. Декомпозиция системы производится исходя из выбранного уровня детализации модели, который, в свою очередь, определяется тремя факторами:
· целями моделирования;
· объемом априорной информации о системе;
· требованиями к точности и достоверности результатов моделирования.
Детализация системы должна производиться до такого уровня, чтобы для каждого элемента были известны или могли быть получены зависимости его выходных параметров от входных, существенные с точки зрения качества моделирования.
Повышение уровня детализации описания системы позволяет получить более точную ее модель, но усложняет процесс моделирования и ведет к росту затрат времени на его проведение. При выборе уровня детализации системы целесообразно руководствоваться следующим правилом: в модель должны войти все параметры, которые обеспечивают определение интересующих исследователя характеристик системы на заданном временном интервале ее функционирования; остальные параметры по возможности следует исключить из модели. Здесь следует иметь ввиду, что перед началом моделирования мы не всегда знаем какие параметры существенно влияют на результат исследования, а какие – нет.
При имитационном моделировании для оценки выбранного уровня детализации можно использовать специальные критерии.
Первый критерий – отношение времени моделирования к времени реального функционирования системы. При одних и тех же подходах к программной реализации модели чем выше это отношение тем глубже степень детализации описания системы.
Второй критерий - разрешающая способность модели. Сюда входит:
разрешающая способность по времени. Она может быть определена как кратчайший интервал модельного времени между изменением состояния системы;
разрешающая способность по информации. Это наименьшая регистрируемая порция информации, представимая в модели.
Третий критерий – число различных моделируемых состояний системы.
Для компонентов модели, относительно которых известно или предполагается, что они сильнее влияют на точность результатов, степень детальности может быть выше других.
С увеличением детальности возрастает устойчивость модели, но возрастают и затраты машинного времени на проведение машинного эксперимента. Под устойчивостью модели понимают ее способность сохранять адекватность моделируемому объекту при всем диапазоне совокупности внешних воздействий. В общем случае можно утверждать, что чем ближе структура модели к структуре системы и чем выше степень детализации, тем устойчивее модель. Совместимость элементов КБАС
Комплексирование КБАС требует совместимости всех элементов структуры КБАС, принадлежащих различным уровням.
Совместимость– это такое свойство элементов целого, при котором элементы могут соединяться, объединяться, сопрягаться при выполнении некоторых условий в целях совместного функционирования частей или целого.
Совместимость элементов предполагает необязательно их физическое объединение. Это может быть их одновременная работа в некотором пространстве ( в одной автоматической системе).
Совместимость является необходимым условием комплексирования, т.е. если комплексирование выполнено, то все входящие в систему элементы совместимы. В зависимости от выполнения объема условий совместимости совместимость может быть частичной или полной. Невыполнение условий совместимости называется несовместностью. Несовместность бывает устранимая и неустранимая. Устранимая несовместность требует и допускает изменения значений параметров элементов. Неустранимая несовместность приводит к принципиальным видоизменениям элементов. Отметим области совместимости. Совместимость элементов КБАС обычно рассматривают в следующих областях:
1) внешняя среда – цель – система;
2) информационная и алгоритмическая совместимость;
3) технические средства (физические процессы, конструкционные элементы, эксплуатационные процессы и др.).
Вообще анализ совместимости и ее обеспечение может рассматриваться как разрешение противоречий. Эти противоречия разрешаются на уровне «заказчик – проектировщик», «проектировщик – модель комплекса», «проектировщик комплекса – проектировщик подсистем».
Обеспечение совместимости элементов и параметров КБАС - важнейшая составляющая процедуры комплексирования КБАС. Виды комплексирования
1. Целевое комплексирование
Целевое комплексирование – это проектная процедура, в которой решается задача достижения ДСА-ом цели в той или иной ситуации. Ситуация определяется состоянием внешней среды, параметрами цели и параметрами ДСА. Фактически рассматриваются различные варианты действия ДСА в различных ситуациях. Большая часть целевого комплексирования выполняется на этапах предварительного проектирования. После отработки схема действия может быть перенесена на структуру и алгоритмы работы КБАС, то есть структура и алгоритмы работы разрабатываются в соответствии со схемой действия. Таким образом, при целевом комплексировании разрабатывается схема действия.
Информационно-алгоритмическое комплексирование – это проектная процедура, в которой совмещаются информационные алгоритмы, структуры моделей всех частей комплекса. Информационно-алгоритмическое комплексирование является необходимым условием комплексирования..
Эта совместимость достигается объединением математических моделей ДСА, объектов внешней среды (целей), средств наблюдения в единую динамическую систему.
Объединение моделей движения, наблюдения и внешней среды в единую динамическую систему приводит: к сложным многосвязным системам большой размерности, разномасштабности, использованию различных временных шкал. Требуются исследования причинно-следственных связей и возможностей декомпозиции и реализуемости.
На основе информационно-алгоритмического комплексирования можно перейти к функциональному комплексированию.
3. Функциональное комплексирование – это определение функциональной последовательности работы КБАС. Покажем на примере управления траекторией движения ДСА.
1) Информационная система (система датчиков) на основе физических процессов обеспечивает данными параметров внешней среды, цели и ДСА систему управления комплексом.
2) Система управления комплексом решает задачу анализа ситуаций, осуществляет выбор целей, прогноз и планирование поведения, формирует возможные области достижения фазовых координат. Выдает системе управления движением заданные значения фазовых координат, принадлежащих области достижимости.
3) Система управления движением на основе информации от системы управления комплексом и от информационной системы формирует команды на рулевые привода для обеспечения движения ДСА по требуемой траектории.
Рис.6
4. Техническое комплексирование.
Техническое комплексирование является синтезом реальной структуры технических средств в соответствии с информационно-алгоритмической структурой комплекса.
Если элементами информационно-алгоритмической структуры комплекса являются алгоритмы системы управления комплексом и алгоритмы системы управления движением, а отношениями выступают логические условия связей алгоритмов, то в технической структуре элементами являются реальные блоки (вычислители, преобразователи и др.), а отношениями выступают реальные линии связи.
Особенностью задач формализованного синтеза технических структур является то, что они относятся к задачам дискретной оптимизации и отличаются многокритериальностью, большой размерностью и требуют практически реализуемых решений.
В процессе комплексирования реальной технической структуры требуется решить систему задач распределения алгоритмов по вычислителям, распределения программного обеспечения в структуре БЦВМ, информации по каналам связи и т.д.
Если в задаче синтеза технической структуры присутствуют ограничения по размещению блоков на реальном ДСА, то при формализованном синтезе имеет место задача синтеза топологической структуры комплекса.
Элементы структурной организации бортовых вычислительных систем. Варианты структур интегрированных комплексов бортовых автоматических систем.
Бортовые вычислительные системы являются в настоящее время неотъемлемой частью ИБАС ДСА. Более того, они используются центральным узлом ИБАС в подсистемах инерциальной навигации, управления траекторией движения, в подсистемах обнаружения и пеленгации целей, самонаведения и самоконтроля.
Современная универсальная БЦВМ разрабатывается и изготавливается по модульному принципу и содержит в своем составе: 1) модуль центрального процессора (ЦП), 2) модули оперативной памяти (ОЗУ), 3) постоянной памяти (ПЗУП – программ, ПЗУК - констант), 4) канал ввода-вывода, 5) источник питания.
Программное обеспечение (ПО) БЦВМ является ее важнейшей частью и отражает содержание алгоритмического обеспечения, специфику его структуры, а также определяет эффективность его применения.
Основными функциями ПО являются
- выполнение вычислений и логических операций согласно заданному алгоритму;
- перестроение конфигурации технических средств;
- предоставление разработчику удобств при программировании и отладке задач.
В качестве ПЗУ может использоваться перепрограммируемое ПЗУ (например, флэш-память). Это полезно при отладке ПО (и всей ИБАС), но не только. Возможность загрузки другого программного обеспечения перед погрузкой ДСА на носитель или перед стартом позволяет значительно расширить возможности ИБАС и всего аппарата в целом.
Канал ввода-вывода предназначен для организации обмена информацией между ЦП и периферийными устройствами. Канал представляет собой специализированный процессор.
В зависимости от характера обслуживания каналы бывают мультиплексные и селекторные. Мультиплексные каналы предназначены для обслуживания большого числа относительно медленно действующих объектов в режиме разделения времени. Селекторные каналы обслуживают только одно быстродействующее устройство и в этом смысле работают в монопольном режиме.
Мультиплексный канал по объему оборудования превосходит селекторный канал и может работать как в мультиплексном режиме, так и в монопольном.
Оборудование канала ввода-вывода может выполняться в виде отдельных блоков (модулей) или входить в состав ЦП как отдельный модуль в зависимости от степени интеграции оборудования и элементной базы.
Рост объема вычислений, связанных с увеличением выполняемых функций и усложнением вычислительных алгоритмов, приводит к тому, что БЦВМ становятся многопроцессорными или даже на борту устанавливается несколько взаимосвязанных БЦВМ, т.е. образуются бортовые вычислительные системы.
Современная бортовая вычислительная система помимо вышеперечисленных модулей БЦВМ содержит еще устройства управления периферийными элементами (контроллеры), периферийные устройства (абоненты), коммутаторы магистралей и таймер.
Модули вычислительной системы аппарата соединяются между собой с помощью унифицированных систем связей. Унифицированные системы связей между модулями вычислительной системы называются интерфейсами.
Интерфейс включает в себя следующие элементы
- магистраль для передачи или приема информации;
- устройство для приема- передачи информации;
- протоколы, определяющие логическую организацию обмена информацией.
В вычислительных системах выделяют несколько типов интерфейсов, таких как
- процессор – память, используемый чаще всего между ЦП и ЗУ. Это самый быстродействующий интерфейс. Обмен информацией происходит в параллельной форме – байтами (8 цепей) или словами, содержащими несколько байт. Магистрали этих интерфейсов коротки – могут быть внутри одной печатной платы, или между платами, или, в крайнем случае, между близко расположенными блоками;
- интерфейс ввода – вывода. Магистрали этого интерфейса достаточно протяженны (в длину аппарата) и могут подвергаться различным помехам. Передача информации чаще всего происходит последовательно по коаксиальному кабелю, либо по симметричному кабелю, витой паре и т.д. с гальванической развязкой между приемником и передатчиком (изолированы по постоянному току).
В общем случае в магистралях ввода – вывода и периферийных устройств обмен может производиться различными типами сигналов: импульсными, релейными и т.д., что порождает широкую номенклатуру необходимых приемников, передатчиков и дополнительных согласующих устройств.
В настоящее время для большеразмерных ЛА и с большим объемом бортового оборудования не исключается вопрос об использовании оптических линий связи, что обусловлено
- невосприимчивостью к электромагнитным помехам;
- пожаробезопасностью и устойчивостью к высоким температурам;
- полной электрической изоляцией, исключающей возникновение коротких замыканий;
- широкой полосой пропускания;
- отсутствием необходимости заземления;
- малой массой.
Необходимо отметить, что протоколы для интерфейсов с параллельной и последовательной передачей информации стандартизированы как на внутри российском уровне, так и на международном.
Для однобитовых каналов существует достаточная свобода выбора.
Подтема: Варианты структуры интегрированных комплексов бортовых автоматических систем
Интегрированный комплекс бортовых автоматических систем (ИКБАС) образуется при объединении функций подсистем и их программно-аппаратных средств на единой информационной основе. Объединение производится для достижения принципиально новых свойств комплекса и максимальной эффективности применения ДСА в целом. Интеграция производится с учетом ограничений на техническую реализуемость и ресурсы бортового оборудования.
Неотъемлемой и существенной частью ИКБАС является автоматизированная система управления (АСУ) ИКБАС. Ядро АСУ составляет бортовая вычислительная система.
Основным назначением АСУ ИКБАС является повышение эффективности функционирования комплекса за счет улучшения использования имеющихся ресурсов.
Помимо АСУ в ИКБАС входит ряд упомянутых ранее подсистем: система управления траекторией движения ДСА, навигационная система, система обнаружения и пеленгации целей, система управления огневыми цепями и т.д. – они перечислены в 1-й лекции.
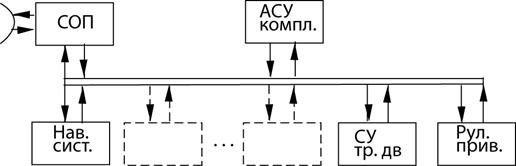
При формировании структуры ИКБАС возможна различная степень интеграции. Если выстроить по одной линии структуры ИКБАС, начиная от малой степени интеграции и кончая максимальной, то в начале будет стоять комплекс, состоящий из ряда подсистем, обособленных аппаратурно. Например, есть блок АСУ, блок СУ траекторией движения, блок СОП и т.д. Все эти блоки объединяются каналом передачи информации и находятся во взаимосвязи под управлением блока АСУ. Структурная схема такой ИКБАС представлена на рис.7.
Рис.7
На этой схеме датчики состояния внешней среды и состояния ДСА входят в состав соответствующей подсистемы, как впрочем и исполнительные устройства (электроклапаны, запалы, пирозапалы и т.д.) В приведенном варианте ИКБАС осуществляется только информационная
интеграция.На другом конце будет стоять комплекс не только с информационной, но и в максимальной степени с аппаратурной интеграцией. Укрупненная структурная схема такой ИКБАС приведена на рис 8.
Рис. 8 Ядром этого интегрированного комплекса бортовой автоматической системы (ИКБАС) является мощная бортовая вычислительная машина, которая выполняет основные вычислительные задачи комплекса. В качестве примера можно сказать, что одна современная БЦВМ для ДСА имеет процессорный узел из 10 одновременно работающих высокопроизводительных микропроцессоров. Связь с периферийными устройствами осуществляется по мультиплексному каналу связи. Периферийные устройства – датчики, исполнительные устройства – выходят на мультиплексный канал через соответствующие контроллеры (чаще всего однокристальные микро-ЭВМ). Датчики и исполнительные устройства соединяются с контроллерами через согласующие устройства. В состав согласующих устройств входят усилительные элементы, АЦП, ЦАП, коммутирующие элементы. Один АЦП обычно обслуживает несколько датчиков через коммутирующие элементы в режиме разделения времени. ЦАП может тоже обслуживать несколько исполнительных устройств через коммутаторы в режиме разделения времени. Важно иметь в виду, что приведенная структура является крайней в ряду структур ИКБАС. Реальные же системы всегда находятся внутри крайних вариантов. Чем реальные системы ИКБАС могут отличаться от приведенной?
Во-первых, БЦВМ может быть не одна, а две и более. (Не имеется в виду наличие контроллеров на периферийном оборудовании, хотя они также являются ЭВМ, но, в основном, с функцией организации взаимодействия периферийного оборудования с БЦВМ). Необходимость второй БЦВМ может быть связана со значительным увеличением объема вычислительных работ, например, в таких подсистемах, как СОП (статистическая обработка случайных сигналов). Вычислительные потребности резко возрастают во время обнаружения и пеленгации целей при малом отношении сигнала к шуму.
Во-вторых, наличие разнообразных каналов обмена информацией с периферийным оборудованием. Конечно, мультиплексный канал обмена решает многие проблемы, но не все. Нужно помнить, что мультиплексный канал работает в режиме разделения времени, что не во всех случаях устраивает – выбирают канал обмена другого типа. С другой стороны, для передачи однобитных сигналов в одну сторону и на малые расстояния мультиплексный канал слишком избыточен. Для сокращения объема оборудования, повышения надежности системы применяют более простые каналы связи (для срабатывания пиропатрона достаточно двух проводников в кабеле).
В-третьих, наличие в ИКБАС информационных цепей, не связанных с работой БЦВМ. Например, информационные цепи в подсистеме обеспечения безопасности функционирования ДСА.
В целом реальный ИКБАС, что важно, должен в максимальной степени удовлетворять техническим требованиям на комплекс.
Для каждого варианта технического задания должен существовать наилучший вариант структуры ИКБАС.
Это не значит, что для разных аппаратов одного класса ДСА ИКБАС могут значительно отличаться.
Автоматическая система управления траекторией движения двухсредных аппаратов.
АСУТД является важнейшей подсистемой комплекса бортовых автоматических систем. Основная задача АСУТД – обеспечение желаемых траекторий движения при помощи существующих на борту ДСА органов управления – рулей (горизонтальных, вертикальных, элеронов).
Принцип управления траекторией движения ДСА основан на принципе обратной связи, проиллюстрированный на рис 9
В процессе движения ДСА имеет определенные значения параметров движения. С другой стороны, для выполнения основной задачи ДСА нужно чтобы ДСА имел другие значения параметров движения, задаваемые СУ комплекса. Эти две совокупности сигналов сравниваются. По результатам сравнения текущих и желаемых (требуемых) параметров в решающем блоке вырабатываются команды (сигналы), показывающие, на какую велтчину должны отклониться те или иные рули управления (рулевые органы). Рулевые приводы должны реализовать эти отклонения.
Укажем основные параметры движения ДСА. Это три координаты центра тяжести или центра величины ДСА в пространстве
– высота или глубина ПА;
– продольная дальность;
– поперечная дальность.
В качестве системы отсчета используется декартова система координат – неподвижная, с началом в точке старта по координатам и . Начало координат по размещено на поверхности воды. Эту систему координат называют стартовой земной системой координат.
Ось направлена вертикально вверх;
Ось горизонтальна и чаще всего направлена на цель ;
Ось составляет правую тройку с осями и .
Три угла, характеризующие положение ПА в пространстве:
– угол курса,
(или ) – угол дифферента (или тангажа)
(или φ) - угол крена.
В качестве системы отсчета используются две системы координат:
– связанная система координат, и система , оси которой параллельны стартовой системе , а начало лежит в ЦТ или ЦВ (т.А) ДСА.
Угол – угол между проекцией оси на горизонтальную плоскость и направлением .
Угол - угол между осью и ее проекцией на горизонтальную плоскость . Угол - угол между плоскостью и плоскостью . Примечание. Углы и имеют физический смысл только, если . В противном случае применяют другие параметры угловой ориентации ДСА.
Три компоненты угловой скорости вращения ДСА
ωх - угловая скорость вокруг оси АX;
ωу - угловая скорость вокруг оси АY;
ωz - угловая скорость вокруг оси АZ.
Три величины, определяющие положение вектора скорости ДСА относительно самого аппарата. Это три проекции вектора скорости на связанные оси – Vx, Vy, Vz , или три величины: - модуль вектора скорости аппарата, угол атаки α - угол между осью АХ и проекцией вектора скорости аппарата на плоскость ХАY, угол дрейфа (или скольжения) β – угол между осью АХ и проекцией на ХАZ. Величины Vx, Vy, Vz и , , взаимосвязаны следующими соотношениями. , ,
, или ,
Итого 12 параметров. Эти параметры изменяются при движении аппарата под действием рулей управления. Рули управления изменяют силы и моменты вдоль и вокруг связанных аппаратом осей. Достаточно часто применяют три пары рулей (6 пар рулей). Вертикальные рули, горизонтальные рули и элероны.
Вертикальные рули – изменяют силы по оси Z и моменты вокруг оси Y, используются для управления в горизонтальной плоскости. Угол их отклонения обозначим как .
Горизонтальные рули – изменяют силы по оси Y и моменты вокруг оси Z, используются для управления в вертикальной плоскости. Угол их отклонения обозначим как .
Элероны - изменяют моменты вокруг оси Х, используются для управления по крену. Угол их отклонения обозначим как .
Но возможно ограничиться четырьмя рулями. Два горизонтальных и два вертикальных руля. Обозначим каждый руль номером от 1 до 4. Если смотреть на аппарат сзади нижний руль будет иметь номер 1. Левый горизонтальный руль будет иметь номер 2. Верхний руль будет иметь номер 3. Правый горизонтальный руль будет иметь номер 4. Пусть система управления траекторией движения выдает: сигнал на отклонение рулей, управляющих курсом аппарата , сигнал на отклонение рулей, управляющих дифферентом аппарата , сигнал на отклонение рулей, управляющих креном аппарата . Тогда упомянутые четыре руля должны отклонятся следующим образом.
, ,
В этом случае управляющий момент вокруг оси АХ будет пропорционален . Управляющий момент вокруг оси AY будет пропорционален Управляющий момент вокруг оси AZ будет пропорционален . Т.е. двумя парами рулей можно создавать три независимых управляющих момента вокруг осей AX, AY, AZ.
Максимальное отклонение рулей ограниченно величиной ±20º (25º) для предотвращения срыва потока с задних кромок рулей. Величина в скобках относится к рулям малого удлинения.
Для конкретности будем в дальнейшем рассматривать аппарат стремя парами рулей. Связь между 12 кинематическими параметрами аппарата и отклонениями рулей δг, δв, δэ задается дифференциальными уравнениями движения.
В общем случае это система обыкновенных нелинейных дифференциальных уравнений 12 порядка. Аналитического решения такая система уравнений не имеет. Наиболее действенны численные методы решения. Однако существуют методы упрощения ситуации.
Если обеспечивается γ =0, то возможно разделить движение на движения в горизонтальной и вертикальной плоскостях. В этом случае движение ДСА описывается тремя системами дифференциальных уравнений
- в вертикальной плоскости,
- в горизонтальной плоскости,
- вокруг продольной оси. Становится возможным рассматривать системы управления независимо соответственно:
1) вокруг оси Х – по крену,
2) в горизонтальной плоскости,
3) в вертикальной плоскости.
Система управления движением подводной ступени ДСА вокруг продольной оси Х Для анализа управляемого движения ПА по крену будем использовать дифференциальные уравнения движения аппарата в горизонтальной плоскости следующего вида:
Эти уравнения записаны для постоянной скорости движения аппарата.
В линейном виде, справедливом для малых углов крена, дифференциальные уравнения по крену имеют следующий вид
Выражения для динамических коэффициентов имеют следующий вид:
,
,
,
. Все слагаемые в правой части дифференциального уравнения представляют частное от деления моментов, действующих на аппарат вокруг продольной оси, на сумму момента инерции аппарата вокруг продольной оси и присоединенного момента вокруг продольной оси.
Рассмотрим моменты, действующие на аппарат вокруг продольной оси. Первое слагаемое обусловлено восстанавливающим моментом от смещения вниз центра тяжести аппарата относительно центра величины. Второе слагаемое обусловлено силами на корпусе аппарата, возникающими при вращении аппарата вокруг продольной оси и создающими демпфирующий момент. Третье слагаемое обусловлено управляющими силами на элеронах и создающими управляющий момент. Четвертое слагаемое обусловлено возмущающим моментом вокруг продольной оси, возникающим при вращении аппарата вокруг оси AY. Пятое слагаемое обусловлено возмущающим моментом вокруг продольной оси, возникающим при движении аппарата с углом скольжения .
Для анализа неуправляемого и затем управляемого движения аппарата по крену необходимо решить дифференциальное уравнение движения. Поскольку в качестве исходного уравнения движения используем линейные дифференциальные уравнения движения, то их достаточно просто можно решить с помощью преобразования Лапласа. Запишем дифференциальные уравнения движения в преобразованиях Лапласа для движения с нулевым углом скольжения. Уравнения движения примут следующий вид:
, где - комплексная переменная - новый аргумент системы, возникший вместо аргумента , , - преобразования Лапласа неизвестных функций угла крена и угловой скорости , - преобразование Лапласа известной функций угла отклонения элеронов , - преобразование Лапласа известной функций угловой скорости вокруг оси AY. Записанная в преобразованиях Лапласа система представляет систему двух линейных алгебраических уравнений относительно неизвестных и .
Решим ее по правилу Крамера. Решение для преобразования Лапласа угла крена будет иметь следующий вид.
Решение состоит из суммы четырех слагаемых, пропорциональных соответственно начальному значению угла крена, начальному значению угловой скорости вокруг оси AX, преобразованию Лапласа угла отклонения элеронов и преобразованию Лапласа угловой скорости вокруг оси AY. Каждая компонента отличается друг от друга, но есть общий знаменатель, являющимся определителем алгебраической системы - Det.
Для рассматриваемой системы он имеет вид
Если приравнять Det = 0, то получим характеристическое уравнение.
Корни характеристического уравнения определяют функции времени в обратном преобразовании Лапласа.
Порядок характеристического уравнения равен порядку системы дифференциальных уравнений.
Если все корни разные и действительные, то функция времени будет
, где S1 и S2 – корни характеристического уравнения.
Если корни комплексные, то они попарно сопряжены, т.е.
и функция времени будет иметь вид , значение начальной фазы зависит от вида числителя в преобразовании Лапласа. Если один корень характеристического уравнения равен нулю S1 = 0 , то функция времени имеет компонентой константу K. Если два корня характеристического уравнения равны нулю S1 = S2 = 0 , то функция времени имеет компонентами константу и линейную функцию времени K1 + K2 · t.
Теперь вернемся к движению ПА по крену. Характеристическое уравнение дифференциального уравнения по крену имеет вид ,
и корни его равны
.
Обычно для реального ПА корни характеристического уравнения S1 и S2 - комплексно-сопряженные с отрицательной действительной частью и тогда для процесс по крену будет иметь вид ,
.
График процесса по крену приведен на рис(кр1) до 12-ой секунды . Начальное рассогласование по крену медленно уменьшается до нуля со значительными колебаниями. Если , т.е. аппарат начинает движение с циркуляцией в горизонтальной плоскости с угловой скорость , то . В этом случае знаменатель в преобразовании Лапласа компоненты, зависящей от
Рис.10
будет иметь следующий вид
Если приравнять нулю это выражение, один корень полученного уравнения будет равен нулю, и в решении для угла крена появится константа. График процесса по крену приведен на рис 10 после 12-ой секунды. Из графика видно, что установившееся значение угла крена аппарата существенно неравно нулю и процесс установления происходит со значительными колебаниям.
Как уменьшить установившееся значение угла крена аппарата? Нужно вокруг продольной оси аппарата создать момент сил, способный повернуть аппарат в сторону уменьшения угла крена. Для этого можно отклонить элероны по закону , где
Посмотрим какие будут процессы по углу крена с этим законом управления. Подставим в исходную систему дифференциальных уравнений выбранный закон управления и получим
Для установившегося движения где будем иметь . Тогда установившееся значение угла крена будет равно . Отсюда видно, увеличивая значение можно существенно уменьшить установившееся значение угла крена. Характеристическое уравнение примет вид ,
а корни характеристического будут равны
По сравнению с неуправляемым движением изменяется только мнимая часть, увеличивается частота колебаний. График процессов движения по крену приведен на рис 11. Итак, при использовании закона управления :
· колебания по крену не устраняются, а увеличивается их частота;
· время затухания колебаний остается таким же как при неуправляемом движении;
· статическая ошибка по крену при циркуляции аппарата в горизонтальной плоскости существенно уменьшается.
Рис.11
Для устранения недостатков и сохранения преимуществ движения по крену с предшествующим законом управления используют закон управления следующего вида
Посмотрим какие будут процессы по углу крена с этим законом управления. Подставим в исходную систему дифференциальных уравнений выбранный закон управления и получим
Для установившегося движения, где , аналогично предшествующему закону управления, будем иметь , и установившееся значение угла крена будет равно . Таким образом и с рассматриваемым законом управления можно достигнуть малого значения угла крена на циркуляции в горизонтальной плоскости. Характеристическое уравнение примет вид ,
а корни характеристического будут равны
К чему привело введение слагаемого в закон управления?
1. С увеличением К2 действительная часть становится более отрицательной, то есть переходный процесс быстрее затухает
2. С увеличением уменьшается частота колебаний . Даже можно выбрать такое большое , что все корни станут действительные, и колебательность исчезнет. График процесса движения аппарата по крену с рассматриваемым законном управления приведен на рис 12. Вообще, действительная часть корня характеристического уравнения определяет длительность переходного процесса, если α<0. Если α>0, то – неустойчивость. Если корней характеристического уравнения несколько и все с отрицательной действительной частью, то корень с минимальной по модулю действительной частью определяет длительность переходного процесса.
Рис.12 Связь между Т (длительностью переходного процесса) и |α| дается выражением
где α – значение действительной части корня характеристического уравнения минимального по модулю;
Δ – доля от 1, на которой можно считать, что переходной процесс закончился.
Для Δ = 0.05 получим
.
Колебательность задается величиной μзад.
Чтобы колебательность была меньше заданной, нужно чтобы
или
Следует отметить, что приведенный анализ движения по крену справедлив без ограничений на отклонение элеронов (на δэ), то есть при малых γ и ωх, что в начале движения аппарата чаще всего не выполняется. Поэтому уравнения движения по крену следует дополнить условиями ограничения δэ. Для этого обозначим . Отклонение элеронов запишем как функцию от . , где функция имеет следующий вид:
Рис.13 При наличии ограничения на отклонение элеронов система уравнений движения по крену будет уже нелинейной. Для исследования систем, описываемых нелинейными дифференциальными уравнениями есть свои методы. Следует отметить, что ранее для управления по крену часто использовались релейные системы управления. Сейчас они используются все реже и реже. Закон управления в релейной системе управления имеет следующийвид:
, где функция имеет следующий вид:
Рис.14
Переходные процессы при отработке больших начальных условий и возмущений достаточно близки к линейным и даже могут быть лучше в плане отработки боковых возмущений (статическая ошибка примерно равна 0). На рис 15 для иллюстрации приведен переходный по крену с релейной системой управления. Рис.15
В режиме стабилизации с релейной системой управления обычно возникают автоколебания угла крена. Их амплитуда может быть с достаточно малой - градуса.
Система управнения траекторией движения ДСА в горизонтальной плоскости.
Для анализа управляемого движения ПА по курсу будем использовать линеаризованные дифференциальные уравнения движения аппарата в горизонтальной плоскости следующего вида:
, где - угол курса; - угловая скорость аппарата вокруг оси AY; - угол скольжения аппарата; - угол отклонения вертикальных рулей; - возмущение действующее на аппарат в горизонтальной плоскости; - динамические коэффициенты линейного дифференциального уравнения движения ПА в горизонтальной плоскости. Эти уравнения записаны для постоянной скорости движения аппарата. Характеристическое уравнение неуправляемого движения ДСА в горизонтальной плоскости по курсу имеет вид:
Корни этого уравнения для осесимметричных, оперенных ПА большого удлинения чаще всего имеют следующие значения
, , , где , действительные отрицательные числа, причем значительно больше . Характеристическое уравнение запишем в виде
Решение дифференциального уравнения движения аппарата в горизонтальной плоскости в преобразованиях Лапласа для угла курса при неуправляемом движении ( является функцией времени) имеет вид Отсюда зависимость угла курса от времени будет иметь следующий вид для const и . Рассмотрим графики процессов неуправляемого движения ПА по курсу, приведенные на Рис 16 , для различных начальных условий. Рис 16 График 1 соответствует условиям ; ; ; ; . График 2 соответствует условиям ; ; ; ; . График 3 соответствует условиям ; ; ; ; . График 4 соответствует условиям ; ; ; ; . График 5 соответствует условиям ; ; ; для сек.; для сек.; . График неуправляемого движения ПА с постоянным углом курса – график 1 – совершенно нереален. Невозможно реализовать отсутствие возмущений и нулевые начальные условия по углу скольжения и угловой скорости . Более реальны графики 2, 3, 4 или их суперпозиция. Отсутствует избирательность по углу курса, к стати, об этом говорит наличие нулевого корня характеристического уравнения неуправляемого движения по курсу. Совершенно необходимо организовать управляемое движение ПА для его целенаправленного движения. Все ДСА имеют систему управления в горизонтальной плоскости.
В простейшем случае система управления по курсу имеет закон управления следующего вида
, где значение угла курса с которым должен двигаться ДСА в установившемся режиме, т.е. заданное значение.
Рассмотрим процессы движения ДСА в горизонтальной плоскости с этим законом управления.
Подставляем в исходное линейное дифференциальное уравнение движения в горизонтальной плоскости вместо .выражение .
Получаем
Или в преобразованиях Лапласа Это уже алгебраическое уравнение относительно , , при заданных , .Решая его относительно , получим
, где характеристическое уравнение имеет вид Приведем пример значений корней характеристического уравнения дифференциального уравнения движения Па в горизонтальной плоскости для неуправляемого и управляемого движения. В качестве ПА пусть будет аппарат типа торпеды, имеющий динамические коэффициенты линейного дифференциального уравнения движения в горизонтальной плоскости равные: , , , , , Для неуправляемого движения: , , . Функция времени переходного процесса по курсу при имеет вид , что иллюстрируется графиками 1, 2, 3 рис 16. Для управляемого движения при : , где , , . Функция времени переходного процесса по курсу при имеет вид , что иллюстрируется графиками рис.17. Рис 17 Здесь график 1 при , т.е. неуправляемое движение,
график 2 при , график 3 при , график 4 при . До 30 секунды , после 30 секунды рад, что обозначено линией 5. Из графика видно, что при малом коэффициенте закона управления процесс отработки рассогласования по курсу почти монотонный, но очень длительный. При большом коэффициенте закона управления процесс отработки рассогласования по курсу убыстряется, становится колебательным, что может отрицательно сказаться, например, в режиме самонаведения. Для устранения колебательности процесса отработки рассогласования по курсу при сокращении времени переходного процесса применяют закон управления вида
Методика анализа движения аналитическими методами такая же, как и с законом управления .Выражение для закона управления подставляем в линейное дифференциальное уравнение движения в горизонтальной плоскости.
1.Неизвестные переменные и функции возмущений их преобразованиями Лапласа.
2.Разрешаем получившееся алгебраическое уравнение относительно неизвестных переменных , , .
3.Знаменатель в передаточной функции является характеристическим полиномом. Приравняв его нулю, получаем характеристическое уравнение.
4. Проводим анализ корней характеристического уравнения (тут же оценивается характер переходных процессов).
Для сравнения процессов отработки рассогласований по курсу для приведенных законов управления на рис 18 изображены графики переходных процессов для закона управления - график 1 и для закона управления - график 2.
рис 18 Таким образом, введение в закон управления по курсу компоненты значительно уменьшает перерегулирование при отработке рассогласования по углу курса ψ и может сделать его почти монотонным.
Сейчас закон управления является самым распространенным законом управления по курсу. При больших рассогласованиях по углу курса необходимо учитывать ограничение угла отклонения вертикальных рулей. Иногда (в настоящее время достаточно редко) для ПА находит применение релейный закон управления по курсу. В этом случае вычисляется управляющая функция и по ее значению отклоняются рули в соответствии с видом функции, приведенной на рис 13.
В горизонтальной плоскости помимо управления по курсу иногда появляется необходимость ограничивать угловую скорость разворота ПА, т.е. ограничения по . Этого требуют некоторые методы самонаведения. Наиболее просто ограничение угловой скорости разворота осуществляется программным методом. В этом случае необходимо ограничивать угол отклонения вертикальных рулей в соответствии с требуемой угловой скоростью разворота . Следует отметить, что для установления соответствия между углом отклонения руля и соответствующей ему установившейся угловой скоростью разворота необходимо пользоваться уже нелинейной моделью уравнений движения ПА. При управлении ограничением угловой скорости разворота по методу обратной связи используют законы управления вида или . При анализе процессов ограничения угловой скорости с использованием этих законов управления учитывают инерционность рулевого привода и ограничение угла отклонения вертикальных рулей. Для более инерционного рулевого привода предпочтительным является второй закон управления.
Автоматическая система управления ДСА в вертикальной плоскости
После системы управления по крену– это следующая по ответственности за живучесть ДСА система управления.
Если быстродвижущийся ПА выйдет на поверхность и если выход на поверхность не предусмотрен схемой действия аппарата, то это в большинстве случаев заканчивается потерей аппарата. Для крылатой ракеты – задеть воду тоже катастрофа.
В простейшем случае для анализа управляемого движения ПА в вертикальной плоскости и синтеза законов управления используют линейную систему дифференциальных уравнений в приращениях относительно:
1) горизонтального установившегося движения – для анализа процессов по , , ,
2) наклонного установившегося движения – для анализа процессов по , ,
Наиболее сложный случай – 1-ый. Линейная система дифференциальных уравнений движения для этого случая имеет вид: , где - глубина движения ПА (в другом обозначении ), - отклонение фактического дифферента ПА от балансировочного, - угловая скорость ПА относительно оси AZ, - отклонение фактического угла атаки ПА от балансировочного, - отклонение фактического угла отклонения горизонтального руля ПА от балансировочного значения на прямолинейном установившемся движении, Для наклонного участка движения, линейная система дифференциальных уравнений движения имеет вид: где - отклонение фактического дифферента ПА от балансировочного на выбранном наклонном участке движения, - угловая скорость ПА относительно оси AZ, - отклонение фактического угла атаки ПА от балансировочного на выбранном наклонном участке движения, - отклонение фактического угла отклонения горизонтального руля ПА от балансировочного значения на выбранном наклонном участке движения Характеристическое уравнение для дифференциальных уравнений относительно прямолинейного горизонтального установившегося движения имеет вид: Корни его , , .
В большинстве случаев .
Таким образом, ДСА в вертикальной плоскости не является устойчивым. По h аппарат дважды нейтрален.
Процессы движения в вертикальной плоскости при , то есть когда фактическое отклонение горизонтальных рулей равно балансировочному, представлено на рис 19.
Рис 19 Траектория 1 соответствует начальным условиям , , . Траектория 2 соответствует начальным условиям , , . Траектория 3 соответствует начальным условиям , , . Но траектория 1 - это теоретическая (расчетная траектория); фактически в экспериментах никогда не удается организовать , и поэтому никогда не удается реализовать прямолинейное горизонтальное неуправляемое движение в вертикальной плоскости на достаточно длительном участке. Совершенно необходимо управлять движением в вертикальной плоскости.
Очевидно, простейшим законом управления является
, где глубина, на которой необходимо организовать движение ПА; С этим законом управления если ПА находится выше , горизонтальные рули отклоняются вниз и аппарат движется вниз. Если ПА находится ниже , горизонтальные рули отклоняются вверх и аппарат движется вверх.
На исторически первых торпедах применяли этот закон управления по глубине. Результат был крайне неутешительный. ПА двигался с большими колебаниями вокруг заданной глубины . Амплитуда колебаний достигала 8 – 10 метров. Примерная траектория движения по глубине имела вид, приведенный на рис 20.
Рис 20 Движение совершенно неприемлемое. Проанализируем сложившуюся ситуацию. Для этого подставим закон управления в уравнения движения и найдем характеристическое уравнение. Оно будет иметь вид:
Если провести анализ устойчивости этой системы (например, по критерию Гурвица), то можно обнаружить, что ни при каких получить отрицательные действительные части корней характеристического уравнения нельзя. То есть с законом управления движение ДСА в вертикальной плоскости всегда неустойчиво.
Для обеспечения устойчивости движения ПА по глубине используют законы управления вида
Эти законы управления в некотором диапазоне значений коэффициентов закона управления обеспечивают устойчивость движения ПА по глубине. Закон управления с дифферентом в своем алгоритме, обеспечивает существенно большую зону устойчивости по коэффициентам в законе управления чем закон управления с производной глубины. В связи с этим закон управления с производной в приведенном виде очень редко используется.
Для расширения зоны устойчивости в закон управления с производной вводят компоненту со второй производной , то есть В таком виде этот закон управления чаще используется.
Наибольшее применение имеет закон управления по глубине в виде
и его модификация
Это сейчас основной закон управления в вертикальной плоскости. Он позволил реализовать высококачественные траектории движения ПА по глубине. Типовые переходные процессы по глубине с этими законами управления приведены на Рис 21.
рис 21 На этом рисунке процесс 1 соответствует закону управления без компоненты с угловой скорость . Процесс 2 соответствует закону управления с компонентой с угловой скорость . Преимущества процесса 2 очевидны. Поскольку переменные и являются отклонениями от балансировочных значений этих переменных, то закон управления фактически имеет вид , где - фактическое значение дифферента ПА, и - балансировочные значения угла дифферента и горизонтального руля. Эти значения могут изменяться по траектории движения. Например, за счет выгорания топлива и изменения центровки ПА. Возникает погрешность по глубине хода ДСА. Эта погрешность может достигать до 3÷4 м в воздухе и до 1÷2 м в воде. Для устранения этой погрешности используют закон управления: , В процессе движения ПА добавок будет изменяться и соответственно рули будут дополнительно отклоняться до тех пор, пока не станет , и ДСА будет точно двигаться по . Однако, нужно очень осторожно выбирать К∫ , так как большой К∫ значительно ухудшает качество переходного процесса. Поэтому компоненту следует подключать в закон управления только на участках стабилизации.
При управлении в вертикальной плоскости существуют участки, где нужно ограничить дифферент ДСА и осуществлять движение ДСА под заданным дифферентом. На таких участках используют закон управления вида:
На участках ограничения угловых скоростей используют закон управления:
, или, что чаще бывает, ограничение угловой скорости производят путем надлежащего ограничения максимального угла отклонения горизонтальных рулей. Типовая траектория движения ДСА в вертикальной плоскости при переходе с одной глубины движения на другую имеет вид, приведенный на рис 22:
Рис 22 На этом рисунке ПА переходит с установившейся глубины хода 10м на установившуюся глубину хода 150м. Процесс по глубине состоит из участка 1 на глубине 10м; участка 2 – выхода на дифферент -0,7 рад и движения вниз с этим дифферентом; участка 3 – первая часть участка выхода на глубину 150м; участка 4 – окончание участка выхода на глубину 150 м и стабилизация глубины хода. Эти участки движения обеспечиваются следующими законами управления. На участке 1 . На участке 2 . На участке 3 . На участке 4 .


 представляет собой модель прямолинейного равноускоренного движения.
представляет собой модель прямолинейного равноускоренного движения.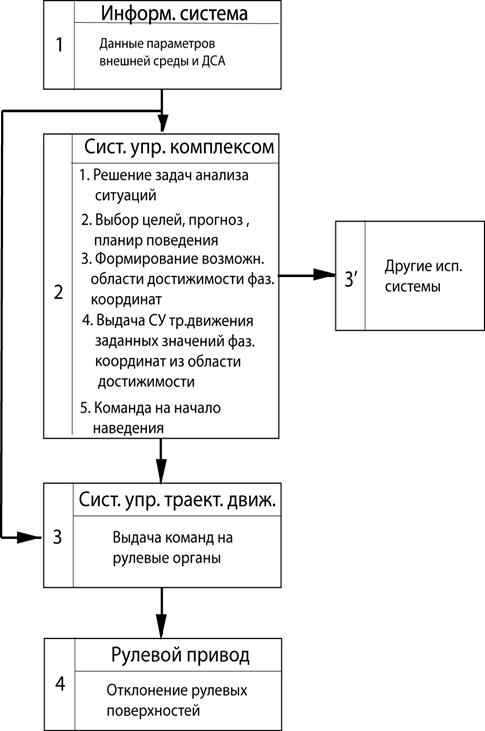

 – высота или глубина ПА;
– высота или глубина ПА; – продольная дальность;
– продольная дальность; – поперечная дальность.
– поперечная дальность. – угол курса,
– угол курса, (или
(или  ) – угол дифферента (или тангажа)
) – угол дифферента (или тангажа) (или φ) - угол крена.
(или φ) - угол крена. – связанная система координат, и система
– связанная система координат, и система  , оси которой параллельны стартовой системе
, оси которой параллельны стартовой системе  , а начало лежит в ЦТ или ЦВ (т.А) ДСА.
, а начало лежит в ЦТ или ЦВ (т.А) ДСА. на горизонтальную плоскость и направлением
на горизонтальную плоскость и направлением  .
. .
.  и плоскостью
и плоскостью  .
. и
и  . В противном случае применяют другие параметры угловой ориентации ДСА.
. В противном случае применяют другие параметры угловой ориентации ДСА. - модуль вектора скорости аппарата, угол атаки α - угол между осью АХ и проекцией
- модуль вектора скорости аппарата, угол атаки α - угол между осью АХ и проекцией  вектора скорости аппарата на плоскость ХАY, угол дрейфа (или скольжения) β – угол между осью АХ и проекцией на ХАZ. Величины Vx, Vy, Vz и
вектора скорости аппарата на плоскость ХАY, угол дрейфа (или скольжения) β – угол между осью АХ и проекцией на ХАZ. Величины Vx, Vy, Vz и  ,
,  ,
,  взаимосвязаны следующими соотношениями.
взаимосвязаны следующими соотношениями. ,
, ,
, ,
, ,
,
 .
. .
. .
. , сигнал на отклонение рулей, управляющих дифферентом аппарата
, сигнал на отклонение рулей, управляющих дифферентом аппарата  , сигнал на отклонение рулей, управляющих креном аппарата
, сигнал на отклонение рулей, управляющих креном аппарата  . Тогда упомянутые четыре руля должны отклонятся следующим образом.
. Тогда упомянутые четыре руля должны отклонятся следующим образом. ,
,  ,
,
 .
.
 .
.


 ,
, ,
, ,
, .
. .
. ,
, - комплексная переменная - новый аргумент системы, возникший вместо аргумента
- комплексная переменная - новый аргумент системы, возникший вместо аргумента  ,
, ,
,  - преобразования Лапласа неизвестных функций угла крена
- преобразования Лапласа неизвестных функций угла крена  и угловой скорости
и угловой скорости  ,
, - преобразование Лапласа известной функций угла отклонения элеронов
- преобразование Лапласа известной функций угла отклонения элеронов  ,
, - преобразование Лапласа известной функций угловой скорости
- преобразование Лапласа известной функций угловой скорости  вокруг оси AY.
вокруг оси AY. и
и 

 ,
,
 ,
, зависит от вида числителя в преобразовании Лапласа.
зависит от вида числителя в преобразовании Лапласа. ,
, .
. процесс по крену будет иметь вид
процесс по крену будет иметь вид ,
, .
. , т.е. аппарат начинает движение с циркуляцией в горизонтальной плоскости с угловой скорость
, т.е. аппарат начинает движение с циркуляцией в горизонтальной плоскости с угловой скорость  , то
, то  . В этом случае знаменатель в преобразовании Лапласа компоненты, зависящей от
. В этом случае знаменатель в преобразовании Лапласа компоненты, зависящей от
 будет иметь следующий вид
будет иметь следующий вид
 , где
, где 

 будем иметь
будем иметь .
. .
. можно существенно уменьшить установившееся значение угла крена.
можно существенно уменьшить установившееся значение угла крена. ,
,
 :
:


 ,
,
 в закон управления?
в закон управления? уменьшается частота колебаний
уменьшается частота колебаний  . Даже можно выбрать такое большое
. Даже можно выбрать такое большое 
 .
.
 или
или 
 .
. .
. ,
, имеет следующий вид:
имеет следующий вид: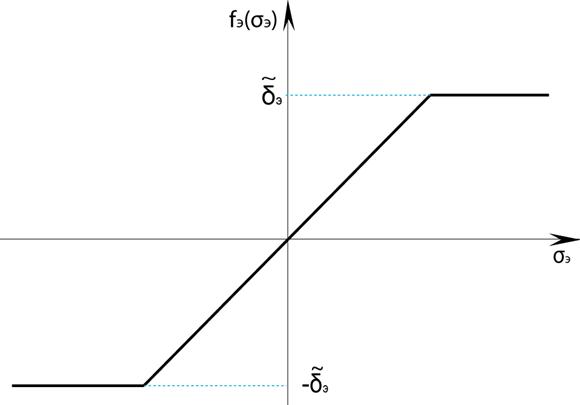
 ,
, имеет следующий вид:
имеет следующий вид: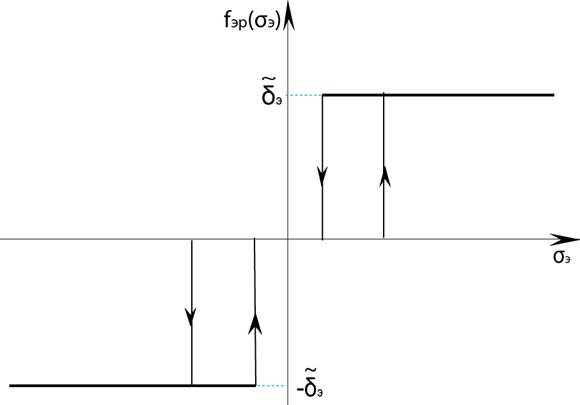
 градуса.
градуса. ,
, - угол курса;
- угол курса;  - угловая скорость аппарата вокруг оси AY;
- угловая скорость аппарата вокруг оси AY;  - угол скольжения аппарата;
- угол скольжения аппарата;  - угол отклонения вертикальных рулей;
- угол отклонения вертикальных рулей;  - возмущение действующее на аппарат в горизонтальной плоскости;
- возмущение действующее на аппарат в горизонтальной плоскости;  - динамические коэффициенты линейного дифференциального уравнения движения ПА в горизонтальной плоскости.
- динамические коэффициенты линейного дифференциального уравнения движения ПА в горизонтальной плоскости.
 ,
,  ,
,  ,
, ,
,  действительные отрицательные числа, причем
действительные отрицательные числа, причем 

 const и
const и  .
.

 ;
;  ;
;  ;
;  ;
;  .
. ;
;  ;
;  .
. ;
;  для
для  сек.;
сек.;  для
для  сек.;
сек.;  ,
, значение угла курса с которым должен двигаться ДСА в установившемся режиме, т.е. заданное значение.
значение угла курса с которым должен двигаться ДСА в установившемся режиме, т.е. заданное значение. .выражение
.выражение  .
.
 ,
,  ,
,  при заданных
при заданных  ,
,  .Решая его относительно
.Решая его относительно  , получим
, получим ,
, имеет вид
имеет вид
 ,
,  ,
,  ,
,  ,
,  ,
, 
 ,
,  ,
,  .
. имеет вид
имеет вид ,
, :
: , где
, где  ,
,  ,
,  .
. имеет вид
имеет вид ,
,
 , т.е. неуправляемое движение,
, т.е. неуправляемое движение, , график 3 при
, график 3 при  , график 4 при
, график 4 при  .
. , после 30 секунды
, после 30 секунды  рад, что обозначено линией 5.
рад, что обозначено линией 5. процесс отработки рассогласования по курсу почти монотонный, но очень длительный. При большом коэффициенте закона управления
процесс отработки рассогласования по курсу почти монотонный, но очень длительный. При большом коэффициенте закона управления 
 .Выражение для закона управления подставляем в линейное дифференциальное уравнение движения в горизонтальной плоскости.
.Выражение для закона управления подставляем в линейное дифференциальное уравнение движения в горизонтальной плоскости. ,
,  ,
,  .
. является характеристическим полиномом. Приравняв его нулю, получаем характеристическое уравнение.
является характеристическим полиномом. Приравняв его нулю, получаем характеристическое уравнение. ,
,  ,
,  .
. - график 1 и для закона управления
- график 1 и для закона управления  - график 2.
- график 2.
 значительно уменьшает перерегулирование при отработке рассогласования по углу курса ψ и может сделать его почти монотонным.
значительно уменьшает перерегулирование при отработке рассогласования по углу курса ψ и может сделать его почти монотонным.
 . Этого требуют некоторые методы самонаведения. Наиболее просто ограничение угловой скорости разворота осуществляется программным методом. В этом случае необходимо ограничивать угол отклонения вертикальных рулей в соответствии с требуемой угловой скоростью разворота
. Этого требуют некоторые методы самонаведения. Наиболее просто ограничение угловой скорости разворота осуществляется программным методом. В этом случае необходимо ограничивать угол отклонения вертикальных рулей в соответствии с требуемой угловой скоростью разворота 
 .
. ,
,  ,
,  ,
,  ,
, ),
), - отклонение фактического дифферента ПА от балансировочного,
- отклонение фактического дифферента ПА от балансировочного, - отклонение фактического угла атаки ПА от балансировочного,
- отклонение фактического угла атаки ПА от балансировочного, - отклонение фактического угла отклонения горизонтального руля ПА от балансировочного значения на прямолинейном установившемся движении,
- отклонение фактического угла отклонения горизонтального руля ПА от балансировочного значения на прямолинейном установившемся движении,

 ,
,  ,
,  .
. .
. , то есть когда фактическое отклонение горизонтальных рулей равно балансировочному, представлено на рис 19.
, то есть когда фактическое отклонение горизонтальных рулей равно балансировочному, представлено на рис 19.
 ,
,  ,
,  .
. ,
,  ,
,  , и поэтому никогда не удается реализовать прямолинейное горизонтальное неуправляемое движение в вертикальной плоскости на достаточно длительном участке. Совершенно необходимо управлять движением в вертикальной плоскости.
, и поэтому никогда не удается реализовать прямолинейное горизонтальное неуправляемое движение в вертикальной плоскости на достаточно длительном участке. Совершенно необходимо управлять движением в вертикальной плоскости. ,
, глубина, на которой необходимо организовать движение ПА;
глубина, на которой необходимо организовать движение ПА; 


 получить отрицательные действительные части корней характеристического уравнения нельзя. То есть с законом управления
получить отрицательные действительные части корней характеристического уравнения нельзя. То есть с законом управления 

 обеспечивают устойчивость движения ПА по глубине. Закон управления с дифферентом в своем алгоритме, обеспечивает существенно большую зону устойчивости по коэффициентам в законе управления чем закон управления с производной глубины. В связи с этим закон управления с производной в приведенном виде очень редко используется.
обеспечивают устойчивость движения ПА по глубине. Закон управления с дифферентом в своем алгоритме, обеспечивает существенно большую зону устойчивости по коэффициентам в законе управления чем закон управления с производной глубины. В связи с этим закон управления с производной в приведенном виде очень редко используется.

 . Процесс 2 соответствует закону управления с компонентой с угловой скорость
. Процесс 2 соответствует закону управления с компонентой с угловой скорость  и
и  являются отклонениями от балансировочных значений этих переменных, то закон управления фактически имеет вид
являются отклонениями от балансировочных значений этих переменных, то закон управления фактически имеет вид ,
, - фактическое значение дифферента ПА,
- фактическое значение дифферента ПА,  и
и  - балансировочные значения угла дифферента и горизонтального руля.
- балансировочные значения угла дифферента и горизонтального руля.  ,
, будет изменяться и соответственно рули будут дополнительно отклоняться до тех пор, пока не станет
будет изменяться и соответственно рули будут дополнительно отклоняться до тех пор, пока не станет  , и ДСА будет точно двигаться по
, и ДСА будет точно двигаться по  . Однако, нужно очень осторожно выбирать К∫ , так как большой К∫ значительно ухудшает качество переходного процесса. Поэтому компоненту
. Однако, нужно очень осторожно выбирать К∫ , так как большой К∫ значительно ухудшает качество переходного процесса. Поэтому компоненту 
 ,
, производят путем надлежащего ограничения максимального угла отклонения горизонтальных рулей.
производят путем надлежащего ограничения максимального угла отклонения горизонтальных рулей.
 .
. .
. .
.