Отрицательный заряд внутри обусловлен суммарным зарядом белков-анионов (крупные белковые молекулы не могут покинуть клетку через неповрежденную мембрану). Положительный заряд снаружи обусловлен суммарным зарядом ионов Na+. Оказалось, что цитоплазма и окружающая клетку среда содержат разное количество ионов К+, Na+, Ca2+, Cl- (таблица 1).
Таблица 1
Различие концентраций ионов в цитоплазме и межклеточном веществе
ионы
концентрация ионов, ммоль/л
внутриклеточная [in]
внеклеточная [out]
[ионin]/[ионout]
Na+
1:9
К+
20:1
Са2+
0.04
1:25
Cl–
1:11
А–
–
–
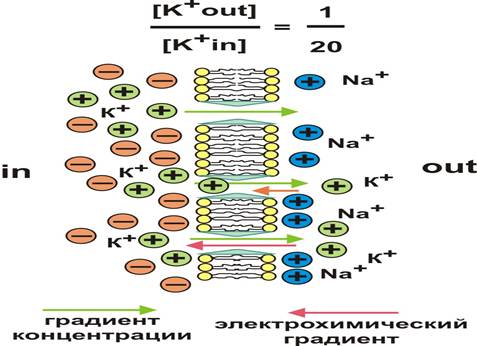
Разница концентраций каждого иона создает силу (градиент концентрации), которая обеспечивает диффузию этого иона по принципу «оттуда, где больше – туда, где меньше». В отсутствие раздражителей мембрана практически непроницаема для Na+, в то время как ионы К+по градиенту концентрации могут выходить из клетки через мембранные каналы (так называемый ток утечки). Как долго калий будет выходить из клетки? Отношение концентраций внеклеточного К+к внутриклеточному составляет 1/20. Однако в результате диффузного выхода калия по градиенту концентрации происходит перенос заряда катиона на внешнюю, положительно заряженную сторону мембраны. По закону электрофизики одноименные заряды отталкиваются, а разноименные - притягиваются. Значит, выход калия будет продолжаться до тех пор, пока сила концентрационного градиента не уравняется с противоположенной силой электрохимического градиента (рис. 2).
Рис. 2. Калиевый равновесный потенциал
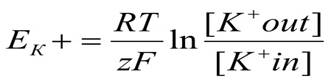
В результате установится относительное равновесие в распределении ионов калия (и других зарядов) по обе стороны мембраны. В этих условиях электрический потенциал мембраны получил название калиевого равновесного потенциала (ЕК+). Обратите внимание, что величина данного потенциала в основном определяется разницей концентрации ионов К+ по обе стороны цитоплазматической мембраны. Равновесный калиевый потенциал можно рассчитать по формуле Нернста:
где R – газовая постоянная Больцмана; T – температура в Кельвинах; z - валентность иона; F - число Фарадея.
При постоянных условиях внешней среды левая часть формулы представляет собой константную величину и равновесный калиевый потенциал зависит только от разницы концентраций ионов калия по обе стороны мембраны.В отсутствие раздражителей равновесный калиевый потенциал относительно постоянный и носит название потенциала покоя.
Другие ионы (Na+, Ca2+, Cl-) в нормальных условиях и при отсутствии раздражителей по разным причинам существенно не влияют на величину мембранного потенциала. Поэтому можно сказать, что величина потенциала покоя в основном определяется разницей концентраций ионов калия по обе стороны цитоплазматической мембраны. От величины потенциала покоя зависит степень возбудимости мембраны. Изменение потенциала покоя может привести к нарушению процессов возбуждения. В организме 98% К+находится внутриклеточно, однако с мочой, потом и слезной жидкостью К+ регулярно выводится из организма. Суточная потребность калия у человека составляет 2-3 г. Недостаток К+ приводит к нарушению функции сердца (аритмия, нарушение сократительной деятельности) и ЦНС (например, галлюцинации и обмороки в условиях минерального голодания или нарушения водно-солевого баланса от жары).
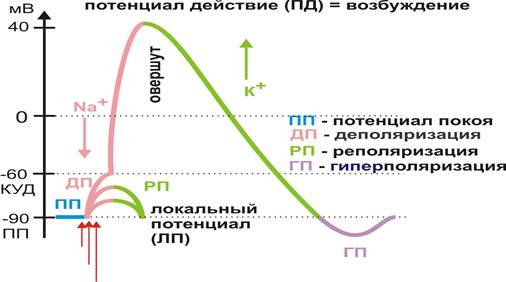
Таким образом мембранный потенциал в отсутствии раздражителей остается относительно постоянным. При действии раздражителей мембранный потенциал изменяется за счет изменения ионной проводимости мембраны.Представим этот процесс на схеме, отразив шкалу величины мембранного потенциала, действие раздражителя отметим стрелкой (рис. 3).
Рис. 3. Мембранные потенциалы
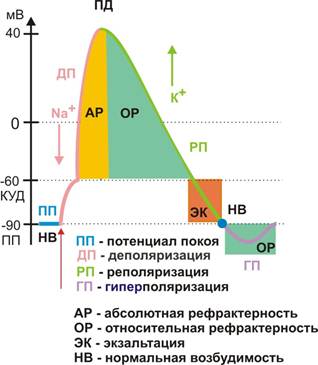
При действии небольшого раздражителя будет происходить уменьшение мембранного потенциала (снижение поляризации мембраны, уменьшение ее электроотрицательности). Этот процесс получил название деполяризации. Затем последует восстановление мембранного потенциала до исходной величины (ПП) - реполяризация. С увеличением силы раздражителя деполяризация развивается быстрее и на большую величину (рис. 3). Однако разницы между этими потенциалами нет - этолокальные потенциалы.
Если раздражитель вызовет деполяризацию примерно на 30 мВ – до критического уровня (КУД - критический уровень деполяризации), вслед за медленной деполяризацией произойдет быстрое изменение мембранного потенциала до величины 30-40 мВ с последующей реполяризацией. Такое изменение мембранного потенциала носит название потенциала действия (ПД), в этом процессе проявляется возбуждение мембраны (рис. 3).
Процесс деполяризации обусловлен входом внутрь клетки Na+ по градиенту концентрации иона через отрывшиеся под действием раздражителя специфические натриевые мембранные каналы.Разница амплитуды ЛП и ПД объясняется количеством открывающихся натриевых каналов. Натриевый канал представляет собой мембранный канальный белок, имеющий пору, соответствующую диаметру гидратированного иона Na+, и две субъединицы, так называемые активационные и инактивационные ворота. Если начало деполяризации вызвано открытием натриевого канала (открываются активационные ворота), то завершение деполяризации связано закрытием ионного канала (закрываются инактивационные ворота). Состояние канала определяется величиной мембранного потенциала, поэтому Na+ каналявляется потенциалзависимым.
Смена внутреннего заряда мембраны с отрицательного на положительный в процессе деполяризации носит название овершута(рис. 3).
Процесс реполяризации обусловлен выходом из клетки К+ по градиенту концентрации иона через отрывшиеся специфические калиевые мембранные каналы. Калиевый канал имеет одну воротную субъединицу, более инертен, поэтому при частых возбуждениях не способен сразу закрыться, чем объясняется явление следовой гиперполяризации(рис. 3).
Длительность ПД составляет 1-2 мс, нервная клетка способна возбуждаться с частотой до 200 имп/с.
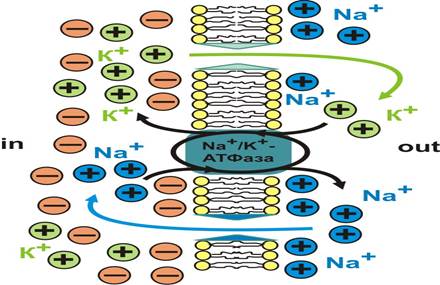
Для поддержания градиентов концентрации ионов Na+ и К+ в мембране расположена ферментная транспортная система - Na+/К+-АТФаза, с помощью которой вошедший в клетку во время деполяризации Na+ перемещается во внешнюю среду, а вышедший из клетки в процессе реполяризации К+ возвращается обратно в цитоплазму (рис. 4).
Рис. 4. Схема функционирования Na+/К+-АТФазы
Для транспорта ионов против градиента концентрации Na+/К+-АТФаза использует энергию АТФ.
Свойство
Na+ канал
К+ канал
Na+/К+-АТФаза
Селективность транспорта
только Na+
только К+
сопряженный
3 Na+ меняет на 2 К+
Направление транспорта
По градиенту концентрации Na+
По градиенту концентрации К+
Против градиента концентрации ионов
Энергозависимость
Нет, диффузия
Нет, диффузия
Да, АТФ
Потенциалзависимость
Да
Да
Нет
Зависимость от физико-химических факторов (рН, t)
Независим
Независим
Чувствительна к изменениям рН и t
Ингибиторы (блокаторы)
Тетродотоксин (рыба фуга)
Тетраэтиламмоний
Строфантин (ландыш майский)
Таким образом, процессы возбуждения обеспечивает работа трех транспортных систем: потенциалзависимых и избирательных Na+ и К+ каналов, а также Na+/К+-АТФазы, краткая характеристика которых представлена в таблице 2.
Мерой возбудимости является минимальная сила раздражителя, вызывающая возбуждение.Такой раздражитель называется пороговым, а его величина - порогом. Между порогом и уровнем возбудимости существует обратная зависимость: чем больше порог, тем ниже возбудимость, и наоборот. Раздражитель силой меньше порогового называют подпороговым, а больше – надпороговым. Надпороговый раздражитель, по вышеуказанному определению, несомненно, вызовет возбуждение. При этом амплитуда потенциала действия с увеличением силы надпорогового раздражителя возрастать не будет. Эта особенность носит названия закона ВСЕ ИЛИ НИЧЕГО: амплитуда потенциала действия при возбуждении максимальна. Иными словами, мембрана нейрона отражает свойства раздражителя в двоичном коде: либо в форме локального потенциала (т.е. не отвечает возбуждением если раздражитель подпороговый), либо генерирует потенциал действия (т.е. возбуждается если раздражитель пороговой или надпороговой силы).
Однако возбудимость не есть величина постоянная; даже в процессе возбуждения чувствительность мембраны к раздражителям существенно меняется. Для оценки уровня возбудимости используют три определения: нормальная возбудимость, экзальтация(повышенная возбудимость) и рефрактерность (пониженная возбудимость или невозбудимость). Если мы обозначим возбудимость мембраны в исходном состоянии покоя как нормальную, то в условиях быстрой деполяризации и начале реполяризации мембрана будет абсолютно рефрактерна (АР), т.е. невозбудима. В процессе реполяризации мембранного потенциала до величины, соответствующей КУД, мембрана будет относительно рефрактерна (ОР) и ее снова можно перевести в состояние возбуждения только надпороговым раздражителем. Когда в процессе реполяризации мембранный потенциал будет соответствовать интервалу от ПП до КУД, возбудимость мембраны будет повышенной (экзальтация мембраны). И наконец, в условиях следовой гиперполяризации возбудимость мембраны снова станет пониженной (рис. 5).
Рис. 5. Изменение возбудимости мембраны в процессе возбуждения
Длительность периода АР будет определять важное свойство возбудимых клеток: их лабильность, как способность отвечать возбуждением на действие порогового (или надпорогового) раздражителя в точном соответствии с заданным ритмом раздражения (Н.Е. Введенский, 1982). Для нервной системы в целом лабильность будет определять индивидуальную способность организма воспринимать и перерабатывать информацию с определенной скоростью. Состояние ОР или АР объясняется частичной или полной инактивацией Na+ каналов. Инактивация Na+ каналов (АР) может наступить в случае длительного воздействия на мембрану подпорогового раздражителя, что носит название аккомодации.
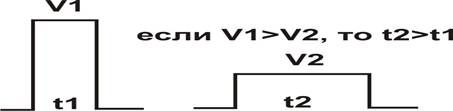
Важнейшими характеристиками любого раздражителя являются его амплитуда (сила) и длительность (время воздействия заданной амплитудой). По этим критериям пороговые раздражители могут отличаться друг от друга. Например, короткий импульсный пороговый раздражитель должен иметь большую силу, в тоже время возбуждение может вызвать раздражитель меньшей силы, но тогда он должен действовать более продолжительное время (рис. 6).
Рис. 6. Сравнительная характеристика пороговых раздражителей (V1 и V2 - амплитуда раздражителей; t1 и t2 - минимальное достаточное для возбуждения время действия раздражителей)
Зависимость силы порогового раздражителя от его длительности носит название кривой «сила-длительность» Вейса-Лапика (рис. 7). Все точки этой кривой отражают параметры порога, правее и выше кривой – параметры надпорогового раздражителя.
Рис. 7. Кривая «сила-длительность»
Заметьте, что сила раздражителя может быть так мала, что как бы он долго ни действовал, возбуждения не будет. С другой стороны, длительность действия раздражителя может быть такой минимальной, что каким бы он сильным ни был, возбуждение тоже не будет. Поэтому ток высокой частоты оказывает тепловой, а не электрический эффект.
Минимальная сила порогового раздражителя носит название реобазы, а минимальная длительность действия этого раздражителя – полезное время (т.е. время, достаточное для возбуждения). Для оценки функциональной подвижности ткани определяют хроноксию – время действия раздражителя силой в две реобазы (Л. Лапик, 1909). Поскольку возбудимость нервной и мышечной ткани отличны, определение хронаксии используют для диагностики повреждений центральной и периферической нервной системы.
Особенность действия на возбудимые ткани постоянным током выражается законом полярного раздражения (Э. Пфлюгер, 1859): при замыкании цепи постоянного тока пороговой (надпороговой) силы одиночное возбуждение возникает под катодом (отрицательным электродом), а при размыкании – одиночное возбуждение возникает под анодом (положительным электродом).
Почему возбуждение при замыкании цепи постоянного тока возникает под катодом, и почему оно единичное?
Катод несет противоположенный заряд по отношению к положительно заряженной внешней поверхности мембраны клетки. Поэтому под катодом при замыкании цепи постоянного тока пороговой (реобаза) или надпороговой силы возникает деполяризация, и при достижении (КУД) развивается возбуждение. Однако после возбуждения продолжающееся действие катодного тока вызывает инактивацию Na+ каналов: КУД смещается, мембрана становится рефрактерной, несмотря на сохраняющуюся деполяризацию (рис. 8). Тоническое изменение мембранного потенциала под катодом носит название катэлеткротона.
Рис. 8. Изменение мембранного потенциала под катодом, катэлектротон
Развитие рефрактерности возбудимой мембраны под катодом приводит к уменьшению ПД нервов, снижению силы сокращения мышц в ответ на действие надпороговых ритмических раздражителей, что носит название катодической депрессии Вериго (Б.Ф. Вериго, 1883).
При замыкании цепи электрического тока под анодом развивается гиперполяризация - тоническое изменение мембранного потенциала, которое носит название анэлектротона (рис. 9). Под влиянием анодного тока Na+ каналы переходят в состояние экзальтации: КУД, который определяет величину потенциала открытия Na+ каналов, становится больше ПП. Поэтому размыкание цепи постоянного тока возвращает мембранный потенциал к исходной величине ПП, что вызывает открытие потенциалзависимых Na+ каналов – возникает анодно-размыкательное возбуждение (рис. 9).
Рис. 9. Изменение мембранного потенциала под анодом, анэлектротон
Потенциал действия способен не только возникать в локальном месте, но и распространяется по мембране клеток возбудимых тканей. Рассмотрим, как протекает этот процесс по мембране нервного волокна.
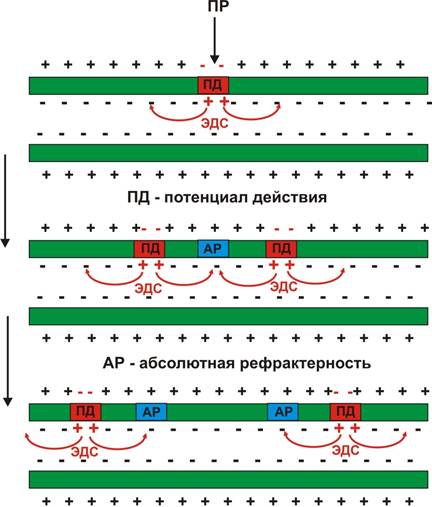
В немиелинизированных волокнах ионные каналы равномерно распределены по длине нервного отростка. В месте действия порогового раздражителя (ПР) развивается деполяризация и происходит овершут (смена заряда мембраны). Это приводит к возникновению ЭДС (электродвижущих сил), направленных в обе стороны вдоль мембраны. Сила ЭДС такова, что вызывает возбуждение в соседних участках мембраны. Процесс распространяется последовательно по всей мембране нервного волокна (рис. 10).
Рис. 10. Распространение возбуждения по немиелинизированному нервному волокну
В целостном организме проведение возбуждения обычно происходит в одном направлении: от сомы нейрона по аксону к нервному окончанию (синапсу).
В миелинизированных нервных волокнах, покрытых шванновскими оболочками (миелином), ионные каналы сконцентрированы вперехватах Ранвье. Это увеличивает амплитуду ПД, ЭДС и, следовательно, на большее расстояние возможна деполяризация соседних участков мембраны. Поэтому миелинизация нервных волокон обеспечивает высокую скорость проведения возбуждения. Возбуждение в миелинизированных нервных волокнах «перепрыгивает» от одного перехвата Ранвье к другому, что получило название сальтаторного проведения возбуждения (рис. 11).
Рис. 11. Сальтаторное проведение возбуждения в миелинизированных нервных волокнах
Демиелинизация нервных волокон в ЦНС приводит к гибели нейронов и развитию рассеянного склероза.
Начало формы
Конец формы
Можно выделить основные закономерности проведения возбуждения по отдельным нервным волокнам:
1. Возбуждение может проводится в обе стороны (обычно в целостном организме возбуждение распространяется векторно: от нервного окончания к соме нейрона, и от сомы по аксону – к нервному окончанию);
2. Амплитуда распространяющегося потенциала действия максимальна, не зависимо от длины нервного волокна (закон «все или ничего»);
3. Для проведения возбуждения необходимы анатомическая и физиологическая целостность проводника (изменение ионного микроокружения, новокаин, лидокаин нарушают проведение).
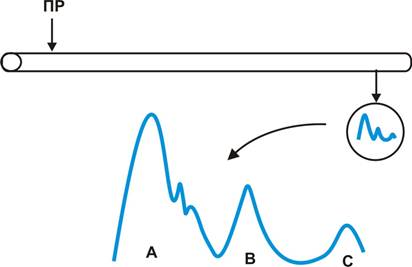
В ЦНС и на периферии нервные волокна обычно концентрируются в пучки или нервы. В состав спинномозговых нервов входят десятки тысяч нервных волокон. Используя осциллограф, Дж. Эрлангер и Х. Гассер впервые зарегистрировали потенциал действия смешанного нерва. Оказалось, что потенциал действия нерва имеет форму трехгорбой кривой, что объясняется различиями в скорости проведения возбуждения отдельных нервных волокон, входящих в состав нерва (рис. 12).
Рис. 12. Потенциал действия нерва
Скорость возбуждения зависит от наличия миелиновой оболочки и диаметра нервного волокна. Исходя из структурно-функциональной особенностей, Дж. Эрлангер и Х. Гассер выделили три типа (в первом типе – несколько подтипов) нервных волокон: Аα - первичные афференты мышечных веретен, двигательные волокна скелетных мышц; Аβ - кожные афференты прикосновения и давления; Аγ - двигательные волокна мышечных веретен; Аδ - кожные афференты температуры и боли; В - симпатические преганглионарные волокна; С- кожные афференты боли, симпатические постганглионарные волокна. Основные характеристики нервных волокон представлены в таблице 3.
Таблица 3
Характеристика нервных волокон по Эрлангеру-Гассеру
Выделим основные закономерности проведения возбуждения по нервам (нервным стволам):
1. Возбуждение может проводится в обе стороны;
2. Амплитуда потенциала действия нерва уменьшается по мере выделения из нерва нервных волокон к иннервируемым органам и тканям;
3. Для проведения возбуждения необходимы анатомическая и физиологическая целостность проводника;
4. Нерв обладает кабельными свойствами. Благодаря наличию оболочек (эндоневрия) возбуждение по отдельному нервному волокну в составе нерва проводится изолированно.
Таким образом, возникнув на мембране нейрона, возбуждение обязательно распространяется. Распространение возбуждения в нервной системе носит название иррадиации. Можно выделить несколько способов иррадиации возбуждений: реверберация, дивергенция, конвергенция. Лоренто-де-Но были открыты циклические формы взаимодействия нейронов, по которым возбуждение может реверберировать (рис. 13 А). Подобный механизм может обеспечивать процесс кратковременной памяти.
Рис. 13. Схема распространения возбуждения в ЦНС
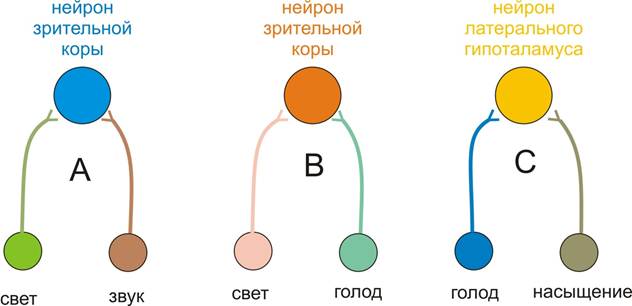
Процесс распространения возбуждения от одной нервной клетки к нескольким носит название дивергенции (рис. 13 С). Благодаря дивергенции нервная клетка способна вовлекать в процесс возбуждения значительной число нейронов (например, нейроны центра голода латерального гипоталамуса вовлекают в процесс мотивационного возбуждения нейроны подкорковых и корковых отделов ЦНС). К отдельной нервной клетке могут поступать возбуждения от других нейронов, что носит название конвергенции (рис. 13 В). Установлено, что даже специализированные нейроны могут получать афферентные возбуждения различной модальности. Например, к нейронам зрительной коры могут конвергировать возбуждения слуховой модальности (поэтому музыка влияет на зрительное восприятие, и наоборот) – это мультисенсорная конвергенция (рис. 14 А). Голод увеличивает количество активных нейронов зрительной коры в ответ на световые стимулы (сенсорно-биологическая конвергенция, рис. 14. В), а в динамике активности нейронов латерального гипоталамуса могут отражаться как мотивация голода, так и ее удовлетворение (мотивационно-подкрепляющая или афферетно-эфферентная конвергенция, рис. 14 С). Совокупность различных видов конвергенций в ЦНС обеспечивает интегративную функцию нервной системы.
Рис. 14. Различные виды конвергенций
Конец формы
Общие сведения о бортовых автоматических системах двухсредных аппаратов, наименования автоматических систем и выполняемые ими функции.
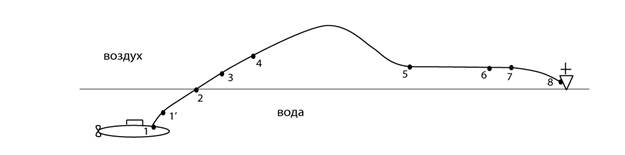
( 2 часа, СРС – 1,5 час) Рассмотрим одну из возможных схем действия ДСА на примере противокорабельной крылатой ракеты с подводным стартом. (Рис.1)
Рис.1 После принятия решения о запуске ракеты, когда ракета находится в пусковой установке (точка 1), выполняются следующие операции: - производятся предстартовые проверки ракеты; - активизируется бортовое электропитание; - из носителя ракеты вводят исходные данные в аппарат, которые определяют начальное положение ДСА, параметры цели, например, дальность, скорость и т.д.; один из возможных вариантов траектории движения, если их несколько, и т.д.
-далее производится старт ДСА, при этом открывается крышка пусковой установки и подается электрический импульс на запал первой ступени стартового ускорителя. Ракета выходит из пусковой установки и начинает движение в воде от точки 1 до точки 2. У нее раскрываются крылья. Движение происходит по некоторой желаемой траектории. Обычно после выхода из контейнера ракета начинает движение под другим углом дифферента, неравным углу наклона контейнера (т.1’). Движение ракеты обеспечивает первая ступень стартовой установки, а система управления траекторией движения обеспечивает движение по заданной траектории.
Затем ракета выходит из воды (точка 2). Как только ракета вышла из воды, подается электрический импульс на запал второй ступени стартового ускорителя и с некоторой задержкой (~ 0,5 c) (точка 3) подается электрический импульс на запал маршевого двигателя. Ракета начинает ускоренное движение на воздушном участке. Как только закончит работать стартовый ускоритель, он отбрасывается при помощи двигателя отброса, который включается при снижении давления в камере сгорания стартового ускорителя (точка 4). Желаемую траекторию движения ракеты (точки 4,5,6,7) обеспечивает система управления траекторией движением (СУ).
На некотором расчетном расстоянии от цели (точка 6) подается сигнал на включение системы обнаружения и пеленгации цели (СОП) (в нашем случае, РЛС). Как только цель обнаружена, выбрана, если их несколько и сопровождается системой СОП начинается участок самонаведения (точки 7-8). Система управления траекторией движения начинает работать в комплексе с системой СОП и изменяет траекторию движения ракеты так, чтобы она попала в цель.
В непосредственной близости от цели может работать система неконтактного взрывателя боекомплекта или таковая может отсутствовать, и будет работать система контактного подрыва БЧ.
Итак, если ракета попала в цель, и произошел подрыв боевой части, то основная цель этого вида оружия выполнена.
Что же обеспечивает выполнение этой цели?
Во-первых – это сам аппарат, в нашем случае это крылатая ракета как конструкция, как средство доставки боевой части определенной массы к цели на определенную дальность с определенной скоростью.
Во-вторых – это энергосиловая установка (двигатель, запас топлива) – обеспечивает движение на определенную дальность и с определенной скоростью; стартовые ускорители – обеспечивают быстрый разгон и старт из контейнеров (из ТПК).
В-третьих – это боевая часть, непосредственно поражающая цель с определенным тротиловым эквивалентом фугасного или кумулятивного действия (или совместного) (осколочного в ПВО).
В-четвертых – это комплекс бортовых автоматических систем (БАС).
Что же входит в комплекс бортовых автоматических систем:
1. Система управления траекторией движения
2. Система автоматики рулевых приводов
3. Система обнаружения и пеленгации целей
4. Программно-временное устройство
5. Система предохранения от несанкционированных действий опасных устройств
6. Система исполнения работы БЧ (неконтактный взрыватель)
7. Система ввода исходных данных
8. Система самоликвидации
9. Система контроля и проверки бортовых систем; 10. Система управления комплексом всех бортовых автоматических систем.
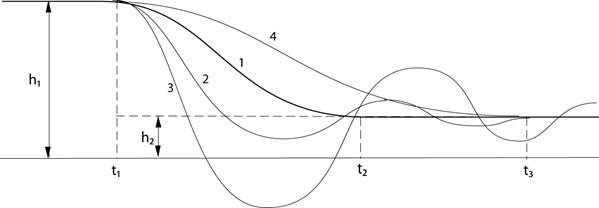
Рассмотрим коротко, что должна делать каждая из указанных систем или устройств автоматики. 1. Система управления траекторией движения. Эта система обеспечивает движение ракеты по требуемой (желаемой) траектории с заданным качеством. Это выполняется путем приложения к ракете некоторого управляющего силового воздействия, формируемого в зависимости от отклонения реальной траектории движения от желаемой (требуемой). Что означает сказанное? Для создания управляющего силового воздействия на ракету существуют управляющие поверхности (рули), создающие дополнительные силы и моменты вокруг связанных с ракетой осей X, Y, Z.Для примера, пусть ракета летит на высоте h1. В момент t1 появилась необходимость сменить высоту полета с h1 на h2.
Рис.2
Система управления должна так переложить горизонтальные рули ракеты, чтобы ракета перешла с высоты h1 на h2. Мгновенно изменить положение ракеты в пространстве невозможно. Но это можно выполнить по-разному (Рис.2). Можно по траектории 1, по траектории 2, по траектории 3, по траектории 4. Отличаются эти траектории качеством переходного процесса. Процесс перехода 4 очень длителен. Процесс 2 имеет некоторую колебательность. Процесс 3 имеет значительную колебательность, приводящую к потере ракеты (вход в воду или землю). Процесс 1. пожалуй, можно считать самым лучшим. Качество переходного процесса является одним из основных требований к системе управления траекторией движения.
На участке движения t < t1 разность между высотой движения ракеты hр(t) и h1 (требуемой) ≈ 0. Как только t > t1 разность между высотой движения ракеты hр(t) и требуемой h2 скачком становится hр - h2 В зависимости от величины этой разности и ее поведения во времени системой управления траекторией движения вырабатываются команды на необходимое отклонение горизонтальных рулей. В конце переходного процесса hр - h2 ≈ 0. Ракета движется на другой высоте. Но на траектории действуют на ракету различные возмущения – порывы ветра, изменения плотности среды и т.д., и ракета стремится отклониться от требуемой высоты полета h2. Система должна обеспечить удержание ракеты на высоте h2. Это так называемый режим стабилизации высоты полета.
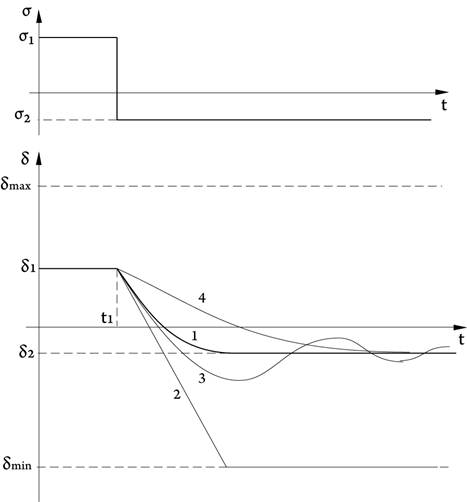
2. Система автоматики рулевых приводов. Система управления траекторией движения не отклоняет рули, а выдает на рулевой привод сигнал – на сколько должны отклониться рули и в какую сторону. Реализует это отклонение рулевой привод совместно с системой автоматики рулевых приводов. Рассмотрим пример.
Рис.3 Пусть до момента t1 от СУ на рулевой привод поступает сигнал σ1 , и в соответствии с ним руль был отклонен на величину δ1 . В момент t1 СУ выдает сигнал σ2 для отклонения руля до величины . И если рулевой привод с системой автоматики правильно спроектированы, то руль будет отклоняться по графику 1. Если система автоматики отсутствует, то руль переложится до упора, а не на δ2 . Если параметры системы автоматики выбраны не очень правильно, то руль может отклоняться либо по 3, либо по 4. Иногда, когда говорят о рулевом приводе, предполагают, что система автоматики рулевого привода уже входит в него.
3. Система обнаружения и пеленгации целей (СОП). Для того чтобы ракета точно попала в цель, в систему управления должны поступать точные значения координат цели. Исходные данные о координатах цели, полученные на носителе ракетного оружия, в большинстве случаев имеют недостаточную точность и чаще всего используются как предварительные, для вывода ракеты в район цели. Для получения более точных данных о координатах цели на ДСА используют системы обнаружения и пеленгации. Для надводного участка атаки эти системы в основном радиолокационного типа, инфракрасного, лазерного, оптического. Для подводного участка - это в основном системы гидроакустического типа. Системы СОП позволяют обнаружить и классифицировать одну или несколько целей. Выделить предпочтительную по тому или иному признаку и в дальнейшем выдавать данные по выбранной цели. Следует иметь в виду, что системы СОП, размещенные на ДСА, выдают информацию относительно координат и осей ДСА. Например, дальность до цели и относительную скорость. Угловые координаты система СОП выдает относительно жестко связанных с ДСА осей X, Y, Z. В режиме, когда СОП следит (выдает информацию) за одной целью, система управления СУ и СОП могут объединяться в одну систему – самонаведения и выводить ДСА непосредственно на цель.
4. Программно-временное устройство (ПВУ). Это устройство достаточно часто встречается в составе автоматических устройств ДСА. Оно предназначено для выдачи некоторых сигналов после истечения некоторого времени после включения. ПВУ может включаться как в момент старта ДСА, так и в определенной точке траектории. Например, в ракете «Аметист» ПВУ включается в момент выхода ракеты из воды. В ракете «Ястреб» ПВУ включается при достижении ракетой глубины 20 м. Все зависит от схемы действия и назначения команд, поступающих от ПВУ.
5. Система предохранения от несанкционированных действий опасных устройств. Наличие этой системы связано с тем, Что ДСА представляет повышенную опасность не только для цели, но и для обслуживающего персонала в условиях арсенала, и для самого носителя. Опасность исходит в основном от боевой части и энергосиловой установки (ТРД, топливо, окислитель). В основном используют многоступенчатые системы предохранения, связанные с различными этапами схемы действия. Блокируются цепи запала двигателя, цепи подрыва БЧ. Блокировки снимаются по мере продвижения ДСА по схеме действия.
6. Система исполнения работы БЧ. Эта система формирует сигнал на подрыв БЧ. Различают в основном контактные и бесконтактные системы исполнения. Подробнее мы остановимся на этом далее в курсе. Здесь сразу хочу отметить связь системы исполнения и системы предохранения. Иногда эти две системы рассматривают как одну в силу их подчас нераздельной связи. Хотя логически это две системы.
7.Следующая в нашем перечне бортовых автоматических систем – это система ввода исходных данных. Технически средства на борту ДСА должны быть выполнены так, чтобы можно было перед стартом ввести глубину хода или высоту, дальность до цели, возможно курс цели, параметры траектории движения, начальное угловое положение и т.д.
8. На некоторых ДСА устанавливают систему самоликвидации. В случае невыполнения боевой задачи (промах, отказ некоторых бортовых систем – пошла в другую сторону) нужно обезвредить ДСА. Для ДСА с подводным конечным участком предварительно затапливают аппарат (если тонет), а затем подрывают. На воздушном участке – подрывают либо специальным зарядом, либо подрывом БЧ.
9. Система контроля и проверки бортовых систем. ДСА должен быть построен так, чтобы перед погрузкой ДСА на носитель, перед стартом ДСА должно быть проверено максимально возможное число систем и устройств аппарата. Для этого существует специальное оборудование на арсеналах и на носителях ДСА (ПЛ, НК, самолетах). Но чтобы это дополнительное оборудование вне аппарата могло проверять ДСА, внутренние системы должны быть спроектированы так, чтобы можно было проверить их функционирование, не разбирая аппарат.
10. Система управления комплексом всех бортовых автоматических систем. Это одна из важнейших автоматических систем ДСА. Эта система координирует, а возможно и объединяет все бортовые автоматические системы с целью более эффективной работы комплекса в целом.
Основные принципы системотехнического подхода к проектированию бортовых автоматических систем. Три уровня системных задач при проектировании бортовых автоматических систем и три уровня описания системы. Многоуровневость моделей системы.
Итак, мы перечислили в основном все бортовые автоматические системы ДСА.
Все перечисленные системы вынуждены работать во взаимосвязи в соответствии со схемой действия, принципами работы систем и т.д. Образуется комплекс технических систем, достаточно большой и сложный.
Существует общая теория больших систем. Особо в ней выделяют большие технические системы. Так вот, бортовые комплексы автоматических систем относятся к классу больших технических систем. По результатам этой теории сформирован системно-технический подход к проектированию больших систем.
Ознакомимся с основными принципами системно-технического подхода к проектированию бортовых автоматических систем.
Проектирование структур современных больших технических систем, к которым относятся комплексы бортовых автоматических систем, производится на базе единого системно-технического подхода, включающего в себя:
1) определение общей структуры системы;
2) организацию взаимодействия между подсистемами и элементами (с учетом влияния внешней среды);
3) анализ и синтез алгоритмов функционирования и определение интенсивности информационных потоков;
4) разработку структур подсистем и элементов;
5) оптимизацию структуры и алгоритмов.
Эти 5 пунктов не являются последовательностью проектирования, а включают в себя содержание проектирования – что должно быть сделано.
Укрупнено процесс проектирования проходит в два этапа:
На первом этапе рассматриваются три вопроса:
1) определяется цель создания системы и круг решаемых задач;
2) дается описание действующих на систему факторов;
3) производится выбор показателя или ряда показателей качества (эффективности) системы – выбор критериев качества.
Фактически решение всех этих трех вопросов формирует исходные данные для проектирования системы. Итак, на первом этапе формируются исходные данные.
На следующем (втором) этапе на основании исходных данных, полученных на первом этапе проектирования, производится структурная и схемно-техническая разработка подсистем и элементов системы.
В процессе проектирования (на втором этапе) решают три группы системных задач:
1-я группа – определение взаимодействия управляющей системы с объектом управления, а также внешней средой. Формирование законов управления;
2-я группа – алгоритмизация законов управления и разработка функциональной структуры (функциональной схемы);
3-я группа – выбор технических средств для реализации информационных процессов и разработка структуры комплекса технических средств.
Этим трем группам системо-технических задач соответствуют три уровня описания системы: информационный, функциональный, системо-технический.
Понимание системы возрастает при последовательном переходе от одного уровня описания к другому: чем ниже уровень описания, тем более детальным оно становится; чем выше уровень описания, тем яснее назначение и содержание системы.
При проектировании больших технических систем используют моделирование. С помощью моделирования производится обоснование и предсказание с определенной степенью приближения свойств и характеристик системы. Моделирование является характерной чертой современного уровня проектирования больших технических систем.
Многоуровневому описанию системы соответствует и многоуровневость моделей системы:
А) математическая модель – это математическое описание системы, ее частей, связей;
Б) имитационная модель – это модель процесса действия системы на основе математической модели системы в реальном или масштабируемом времени;
В) полунатурная модель - это когда часть системы описана математически, а часть - существует в натуральном виде,
Г) натурная модель – это реальная модель системы.
Принципы построения бортовых автоматических систем. Алгоритм работы автоматической системы. Датчики входных физических параметров. Носители сигналов. История развития автоматических систем двухсредных аппаратов. Понятие об интегрированной бортовой автоматической системе.
Каждая автоматическая система имеет несколько входных параметров и несколько выходных параметров (возможно один). Значение выходного параметра формируется в зависимости от значений входных параметров в текущий момент времени и вообще в зависимости от значений входных параметров за все предшествовавшее время.
Формирование значения выходного параметра строго определено и может быть описано математически. С вопросом формирования значения выходного параметра связано понятие алгоритма.
Определение:
Алгоритмом называется строго установленный порядок операций, по которому формируется значение выходного параметра на основе информации о входных параметрах.
Системы, в которых выходной параметр формируется (вычисляется) на основе значений входных параметров, называются информационными системами. Значения входных и выходных параметров в информационных системах принято называть сигналами.
Автоматические системы ДСА являются информационными системами.
Упрощенно построение конкретной автоматической системы разделяют на два этапа. Отметим, что все это на основе системо-технического подхода.
Первый – это разработка алгоритма работы автоматической системы на основе технических требований к системе.
Второй - это разработка аппаратурной реализации автоматической системы, реализующей алгоритм работы, созданный на первом этапе. По результатам второго этапа возможна коррекция алгоритма работы.
Алгоритм работы автоматической системы определяется не только техническими требованиями к системе, но и возможностями текущего состояния техники и результатами разработки аппаратуры. Алгоритмы могут быть и такие, что реализовать их при современном уровне развития техники невозможно, или реализация будет такова, что использовать ее нецелесообразно. Например, габаритно-весовые характеристики будут слишком велики или недостаточна надежность, велика энергоемкость, велика стоимость и т.д. Таким образом, разработка алгоритма автоматической системы – это выработка компромиссного решения между требованиями и возможностями технической реализации. Для дальнейшего изложения принципа построения бортовых автоматических систем необходимо коротко остановиться на истории развития автоматических систем.
Начнем с понятия входных сигналов.
Входными сигналами в автоматических системах в большинстве случаев являются физические параметры, например, глубина ПА, угол наклона продольной оси относительно горизонта – дифферент (тангаж), механическая деформация при контакте с ДСА с целью или его резкое торможение и т.д. Чтобы оперировать со значениями этих физических параметров, их нужно преобразовать в другие физические величины, так называемые носители сигнала, с которыми можно работать: складывать, вычитать, сравнивать, принимать логические решения. Устройства, преобразующие значения реальных физических параметров в параметры физических величин, являющихся носителями сигналов называются датчиками. Это датчики давлений, датчики углов, датчики угловых скоростей и т.д.
На ранних этапах развития ДСА (ПА) в качестве физических величин (носителей сигналов) чаще использовались механические перемещения. Датчики преобразовывали реальную физическую величину в линейное или угловое перемещение. Датчик давления при помощи мембраны преобразовывал давление (или глубину) в перемещение мембраны и т.д. При помощи рычажных механизмов осуществлялось сложение и вычитание величин. При помощи курковых механизмов осуществлялось сравнение величин, то есть выполнялись релейные функции (дающие на выходе значение 0 или 1). Автоматические системы ПА были механическими. Возможности этих систем в плане сложности выполняемых алгоритмов и точности были весьма ограничены. Однако, во времена механических автоматических систем были созданы алгоритмы работы, которые применяются и сейчас на других носителях сигналов и элементной базе устройств. В качестве примера можно отметить СУ глубиной хода ПА, использующей в законе управления глубину, первую производную глубины и вторую производную глубины; гироскопическую систему управления курсом ПА (прибор Абри). Использовался механический ввод исходных данных по глубине, по курсу, по изменению курса на дистанции хода (шпиндельный ввод). Не следует считать, что использование механических величин в качестве носителей сигналов полностью ушло в прошлое. Это так для сложных алгоритмов работы устройств. Но есть устройства автоматики, где применение механических входных переменных позволяет создать более простые и надежные приборы. Все зависит от конкретного алгоритма работы и его реализации.
С развитием электронной техники значительно возросли возможности реализации сложных алгоритмов работы систем автоматики ДСА. Носителем входных и в значительной мере выходных сигналов стало электрическое напряжение или электрический ток. Датчики входных сигналов стали преобразователями физических величин в электрическое напряжение или ток. Появились достаточно сложные и совершенные по параметрам электронно-механические СУ, СОП, ССН, появились неконтактные взрыватели. Для преобразования информации при реализации алгоритмов стали применяться электронные элементы. Электронная элементная база развивалась в направлении электронные лампы → полупроводниковые дискретные элементы (транзисторы, диоды) → интегральные аналоговые полупроводниковые микросхемы → интегральные цифровые полупроводниковые микросхемы . И в настоящее время происходит дальнейшее и непрерывное увеличение степени интеграции электронных элементов в конструктивной единице – микросхеме. Системы автоматики были аналоговыми. Что это значит – реальной физической величине входного сигнала соответствовала величина напряжения, тока или другого параметра электрического сигнала. К настоящему времени системы бортовой автоматики аналогового типа, выполненные на интегральных микросхемах, все еще занимают значительное место в оборонном комплексе России.
Дальнейшее развитие электронной техники, связанное с увеличением степени интеграции элементов и развитием цифровой техники, привело к цифровому методу обработки информации в наиболее сложных по алгоритмам системах автоматики – СУ, СОП, ССН, неконтактные взрыватели и т.д. Все переменные в системах автоматики представляются в цифровом виде: входные, промежуточные и в значительной мере выходные (за исключением тех сигналов, которые подаются на исполнительные электромеханические устройства). Для преобразования аналоговых электрических сигналов в цифровые и наоборот, цифровых в аналоговые, в устройства входят АЦП (аналого-цифровые преобразователи) и ЦАП (цифро-аналоговые преобразователи). Для проведения вычислений согласно алгоритму работы используется цифровое вычислительное устройство на базе микропроцессоров и других элементов цифровой вычислительной техники.
Итак, мы имеем в ДСА ряд автоматических систем с цифровым методом обработки информации. Большая часть автоматических систем ДСА взаимосвязаны: информация с системы СОП и из навигационной системы должна поступать в систему СУ; из СУ информация должна поступать на систему рулевых приводов и т.д.
Такое построение бортовых автоматических систем как совокупности конструктивно законченных систем, связанных между собой и другими системами ДСА линиями связи, не является наилучшим.
Более предпочтительной является структура, где обработка информации сосредоточена в мощном вычислительном ядре, связанном не с целыми автоматическими системами, а с датчиками автоматических систем и исполнительными элементами – рулевыми машинами, клапанами, пиропатронами, запалами, двигателем и ускорителем, исполнительными механизмами БЧ и т.д.
В аппарате образуется единое информационное устройство, в котором объединены все (или большая часть) бортовых автоматических систем: гидроакустическая (радиолокационная), навигационная система, система управления и стабилизации, система управления исполнительными элементами БЧ, система управления рулевыми приводами, система регистрации и система ввода исходных данных и т.д. Появляется возможность вводить перед стартом программу БЦВМ, меняя ее в зависимости от различных условий применения ЛА и тактических ситуаций. Можно изменять схему действия ЛА в пределах его возможностей, обусловленных конструктивным выполнением.
Значительно расширяются вычислительные возможности комплекса. И если раньше некоторые алгоритмы работы систем автоматики, таких как СОП или навигационная система, были недоступны ввиду большого объема вычислений, то с увеличением производительности БЦВМ эти ограничения все чаще снимаются.
Система бортовой автоматики ЛА, имеющая единое информационное пространство, основанное на высокопроизводительной бортовой цифровой вычислительной машине, называется интегрированной бортовой автоматической системой (ИБАС).
Помимо функциональных преимуществ и возможностей интегрированные системы ИБАС имеют значительные конструктивные преимущества. Это значительное уменьшение весов и габаритов аппаратуры. Это значительное уменьшение весов и габаритов цепей информационной связи между ядром ИБАС с датчиками и исполнительными механизмами – кабельные магистрали. Используются самые различные цепи информационного обмена между БЦВМ и другими блоками. Это - параллельные и последовательные, это – однонаправленные и двунаправленные. Все зависит от конкретного блока и его расстояния от БЦВМ, от объема информации и ее вида. В качестве примера можно указать на высокоэффективный канал межблочного обмена – это мультиплексный канал информационного обмена. Схема его такова:
Рис.4 Есть одна единственная цепь (коаксиальная или симметричная двунаправленная), связывающая все блоки, участвующие в информационном обмене. Каждый из блоков имеет свой специфический адрес (код). Блок, желающий получить или передать информацию, в момент, когда линия связи свободна, передает адрес блока, от которого или к которому нужно передать порцию информации, и свой адрес. Блок, к которому обращались, подтверждает способность передать или принять информацию. После этого начинается обмен (передача или прием). При достаточно большой скорости передачи информации по одному мультиплексному каналу могут работать много блоков аппаратуры.
Вообще алгоритмы информационного обмена стандартизованы как на внутри российском уровне, так и на международном.


 время (рис. 6).
время (рис. 6).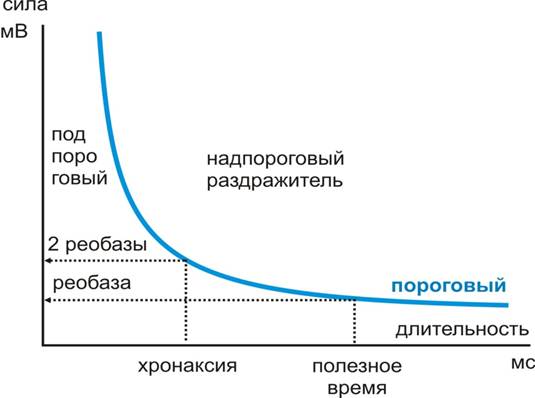
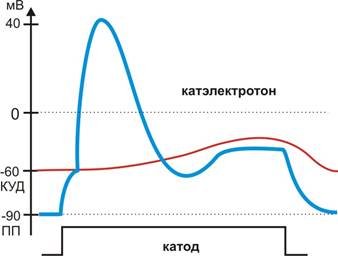 Рис. 8. Изменение мембранного потенциала под катодом, катэлектротон
Рис. 8. Изменение мембранного потенциала под катодом, катэлектротон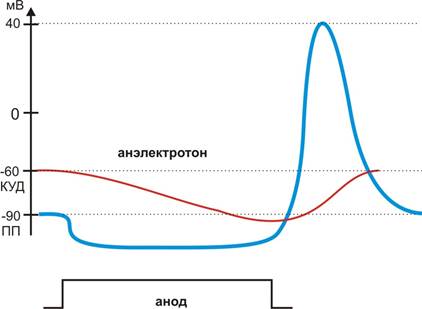


 . И если рулевой привод с системой автоматики правильно спроектированы, то руль будет отклоняться по графику 1. Если система автоматики отсутствует, то руль переложится до упора, а не на δ2 . Если параметры системы автоматики выбраны не очень правильно, то руль может отклоняться либо по 3, либо по 4. Иногда, когда говорят о рулевом приводе, предполагают, что система автоматики рулевого привода уже входит в него.
. И если рулевой привод с системой автоматики правильно спроектированы, то руль будет отклоняться по графику 1. Если система автоматики отсутствует, то руль переложится до упора, а не на δ2 . Если параметры системы автоматики выбраны не очень правильно, то руль может отклоняться либо по 3, либо по 4. Иногда, когда говорят о рулевом приводе, предполагают, что система автоматики рулевого привода уже входит в него.