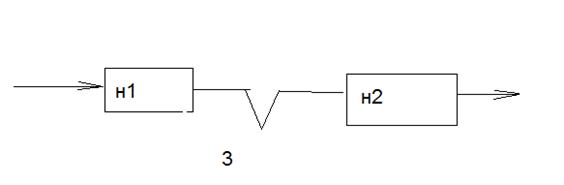
В случае необходимости уравновешивания оборудования с разной производительностью.
Q1 > Q2
V3 =
В случае длительного хранения вместимость емкости может быть определена:
Vе = , м3
N – число суток хранения исходного корма.
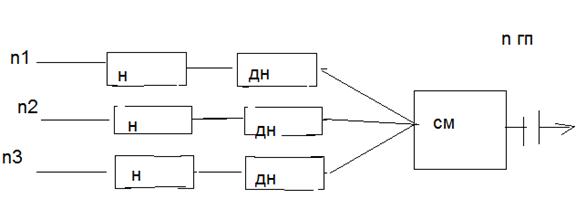
ПТЛ смешивания кормов
Возможны два варианта:
1. когда производительность линии смешивания равняется сумме производительностей оборудования:
Qсм =
2.
Vсм =
В состав линии смешивания обязательно должен входить дозатор для того, чтобы обеспечить нужное количественное соотношение данного количества корма в общем составе смеси. Выбор проводится с учетом технологического назначения дозатора, емкости имеющегося бункера, производительности питателя и вида корма.
Производительность дозаторов зависит от свойств дозируемого материала, а так как их основная масса предназначается для дозирования различных продуктов, она должна определяться конкретно для каждого случая.
Для дозаторов с рабочим органом в виде ленточного транспортера:
Qл.д. = ,
где b и h – ширина и высота слоя корма на ленте, м;
υл – скорость движения ленты, м/с;
ρ – плотность укладки корма;
β – коэффициент заполнения рабочей камеры дозатора кормом.
Для шнекового дозатора:
Qш.д. = ,кг/ч
где Д, d – диаметры шнека и его вала, м;
S – шаг шнека, м;
n – частота вращении шнека, мин-1.
Для тарельчатого дозатора:
Qт.д. = , кг/ч
где Vc – объем слоя, снимаемого за один оборот, м3;
,
где R0 – расстояние от оси вращения тарели до центра тяжести сечения, м;
Fc – площадь поперечного сечения кольцевого слоя, м2;
n – частота вращения тарели, мин-1.
Жидкостные дозаторы:
, кг/ч
где μ – коэффициент истечения жидкого компонента, μ=0,8…0,9;
f0 – площадь отверстия или насадки, м2;
Vu – скорость истечения, м/с;
.
Технические характеристики бункеров-дозаторов
и питателей кормов
Показатель
ПК-6,0Б
ТК-5Б
ТК-5
КП-10
КТУ-10
КПГ-10.46.15
ПЗМ-1,5
ДС-15
ДК-10
МТД-3А
1. Производительность, т/ч
1,3-10,3
5-6
5-6
5-10
5-60
5-60
5-60
3-15
0,3-10
0,03-0,75
2. Вместимость кузова или бункера, м3
9,0
6,0
3,0
8,0
10,0
30,0
20,0
1-1,5
-
-
3. Назначение (вид корма)
Кон-центр.
Кор-нек-луб
Кор-нек-луб
Зеленсилоскорнеклуб
Грубые, сочные
Сено, силос сенаж, солома
Сено, силоссенаж солома
Корнеклуб.
Концентр.
Концентр.
ПТЛ раздачи кормов
1. принцип подбора и расчета транспортно-раздающих средств
2. Краткие технические характеристики различных видов транспортно-раздающих средств
1.
Исходными данными для подбора и расчета т.р.с. в большинстве случаев является максимальная разовая дача смеси кормов. Раздающие смесь устройства комплектуют на основе мобильных, стационарных и комбинированных транспортных устройств.
Для мобильных кормораздатчиков принцип подбора и расчета следующий:
1. определяется требуемая вместимость бункера или кузова кормораздатчика
, м3
2. По величине Vтр. корма выбираем мобильный кормораздатчик с объемом бункера близким к объему требуемому.
3. Определяем количество корма, необходимое выдать на 1 м длины кормушки
,
где qсм – норма выдачи смеси на 1 голову;
l – длина кормушки, 1-1,2 м.
4. Высота кормовой смеси в бункере выбранного раздатчика составит
, м,
где В и L – соответственно ширина и длина бункера выбранного кормораздатчика
5. В зависимости от вида выбранного устройства определяем скорость с которой кормораздатчик должен двигаться вдоль линии кормушек для обеспечения равномерности раздачи корма.
Для ленточного выгрузного устройства:
. м/с,
где Vл – скорость подающего конвейера, м/с;
ρсм – плотность смеси корма в бункере, кг/м3;
К0 – коэффициент отставания корма в бункере от продольного транспортера, (0.94…0,96);
Кб – коэффициент снижения скорости транспортера за счет пробуксовки колес, (0,95…1,0).
Для скребкового :
,
где b и h – длина и высота скребка транспортера;
Vc – скорость движения скребкового транспортера;
βс – коэффициент, учитывающий заполнение кормом пространства между скребками;
nk – число радов кормушек, в которых индивидуально подается корм.
6. Определяю действительное время раздачи кормовой смеси
, сек,
где Lк.п. – длина кормового прохода, берется по графической части стойлового помещения и условно может быть принята при расстановке животных в один ряд Lк.п. = ,
где М – поголовье животных;
lпр – ширина проходов по длине кормового прохода.
При расстановке животных в два ряда указанная выше величина уменьшается в два раза.
Для стационарных кормораздатчиков
1. Определяем полезную площадь стойлового помещения:
, м2,
где Lп и Bп – соответственно длина и ширина стойлового помещения;
где tтр – время, отводимое на раздачу для стационарного кормораздатчика в соответствии с нормами (не более 20 минут).
4. Выбираю кормораздатчик, отвечающий технологическим требованиям (в зависимости от состава смеси, вида животного и т.д. и близкий по производительности к Qтр).
5. Уточняю производительность выбранного стационарного кормораздатчика в зависимости от состава смеси и вида транспортера, входящего в состав кормораздатчика.
для ленточного транспортера:
, кг/с,
где F – площадь сечения корма на ленте;
Vл – скорость движения ленты транспортера, м/с;
Ρсм – плотность смеси корма.
,
где m1, m2… mп – масса каждого вида корма;
ρ1, ρ2… ρп – плотность каждого вида корма.
Для грубых кормов ρ= 0,25…0,3 т/м3.
для цепочно-скребкового транспортера:
, кг/с,
где k0 = 0б45…0,8 – скоростной коэффициент, показывающий отставание транспортируемого корма от цепи со скребками;
kу = 1,05…1,1 – коэффициент уплотнения перемещаемого материала в желобе под действием скребков;

 , м3
, м3


 ,
, ,кг/ч
,кг/ч , кг/ч
, кг/ч ,
, , кг/ч
, кг/ч .
. , м3
, м3 ,
, , м,
, м, . м/с,
. м/с, ,
, , сек,
, сек, ,
, , м2,
, м2, , гол/м2
, гол/м2 ,
, , кг/с,
, кг/с, ,
, , кг/с,
, кг/с, ,
,