Преобразования Лапласа непрерывных функций, являющихся решениями линейных дифференциальных уравнений с постоянными коэффициентами описываются дробно-рациональными функциями. Напротив, изображения решетчатых функций (см. примеры 1 -3) оказываются трансцендентными функциями, оперировать с которыми значительно труднее. Поэтому в практике управления получило широкое распространение
z – преобразование, сохраняющее дробно-рациональные выражения и для дискретных сигналов. Переход от дискретного преобразования Лапласа к z – преобразованию осуществляется простой подстановкой
(25)
которая, в частности, отображает всю левую полуплоскость s-плоскости в круг единичного радиуса z-плоскости. Соответственно из (12), (17) и (24) получим соотношения для вычисления z – преобразований
(26)
(27)
(28)
Подстановка (25), как нетрудно видеть, переводит трансцендентные функции примеров 1-3 в соответствующие дробно-рациональные выражения.
Обратное z – преобразование можно получить их обратного преобразования Лапласа
(29)
При этом непрерывное время t заменяется дискретным nT,
интеграл заменяется бесконечной суммой по интервалам периодичности
Из (25) следует, что dz=Tzds, и вертикальный отрезок интегрирования s-плоскости соответствует окружности радиуса e. Откуда получается искомое соотношение для обратного z – преобразования:
(30)
Контур, ограниченный окружностью радиуса eотвечает области сходимости прямого
z – преобразования.
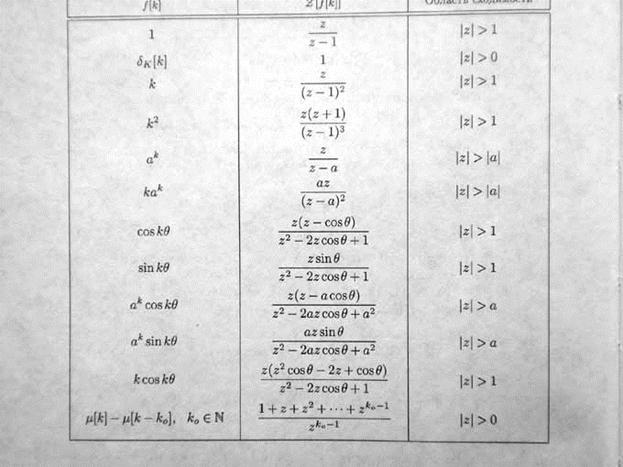
В таблице 1 приведены z – преобразования для некоторых типовых функций [ ].,
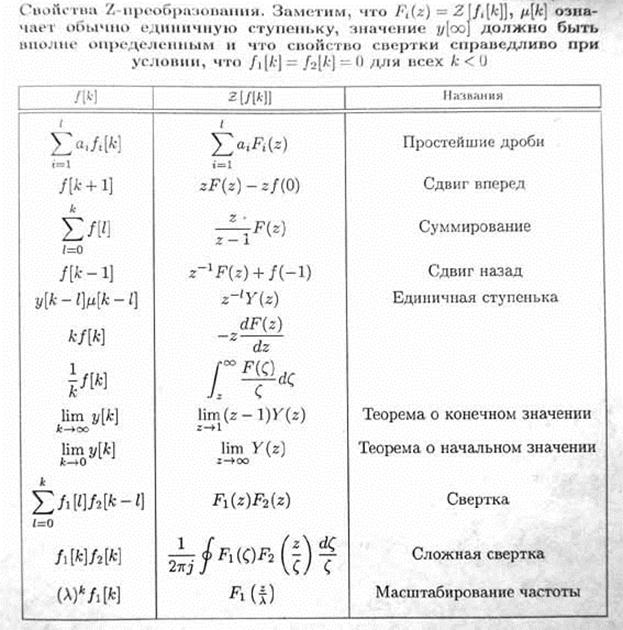
а в таблице 2 – важнейшие свойства z-преобразования, доказательства которых будет полезным упражнением для изучающих настоящий курс.
Таблица 1
Таблица 2
При описании дискретных систем Z-преобразование получило широкое распространение как удобная форма перехода от разностных уравнений к алгебраическим, подобно тому, как для дифференциальных уравнений та же процедура обеспечивается с помощью преобразования Лапласа. Из свойств Z-преобразования нетрудно видеть, что оно тесно связано с оператором сдвига q
,
так что, например, непрерывному дифференциальному уравнению первого порядка
соответствует разностная модель, выраженная через оператор сдвига
,
в которой дифференциальные соотношения моделируются абсолютными значениями переменных в тактовые моменты времени. Это в ряде случаев приводит к заметной разнице в описании непрерывных систем и соответствующим им дискретным аналогам, которая не исчезает при стремлении периода квантования к нулю. Упомянутые отличия можно объяснить, рассматривая в непрерывных сигналах предельный переход
,
в котором представлено временное и относительное смещение относительно абсолютного значения , тогда как разностные модели оперируют с абсолютными значениями в тактовые моменты.
Естественно ожидать, что упомянутая разница не будет проявляться при преобразовании не в виде оператора сдвига, а в форме дельта-оператора [Goodwin]
,
который стремится к оператору дифференцирования при уменьшении шага квантования до нуля. Из последнего соотношения нетрудно представить дельта-преобразование в форме оператора сдвига и z-преобразования:
, .
Непосредственными преобразованиями проверяется, что в рассматриваемой альтернативной форме Z-преобразование стремится к преобразованию Лапласа при стремлении периода квантования к нулю. Представляя преобразование Лапласа в форме суммы Римана
,
и используя изоморфное изменение аргумента , определим прямое и обратное дискретные дельта-преобразования как функции аргумента :
Прямое и обратное дельта-преобразования связаны с соответствующими Z-преобразованиями соотношениями
,
которые позволяют составить таблицы дельта-преобразований из соответствующих таблиц Z-преобразований.
Пример. Продемонстрируем сходимость дельта-преобразований к преобразованию Лапласа на простом примере. Для экспоненты прямыми вычислениями получим изображение
.
которое при стремится к преобразованию Лапласа .
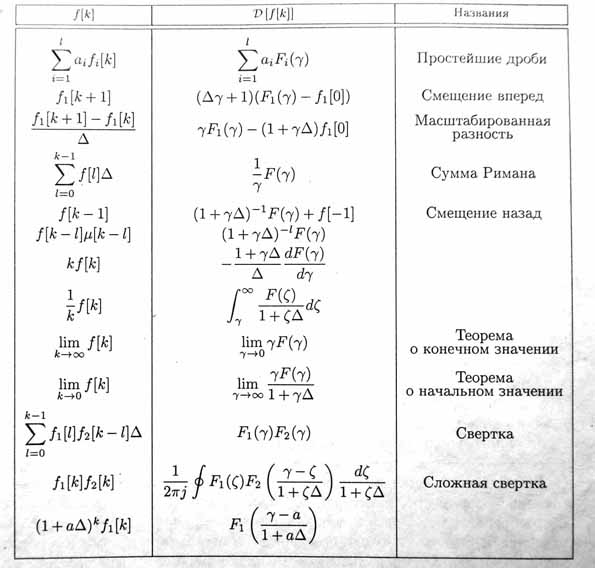
В таблице 3 приведены дельта-преобразования для ограниченного числа типовых функций, а в таблице 4 – важнейшие свойства дельта-преобразования.

 (25)
(25) (26)
(26) (27)
(27) (28)
(28) (29)
(29)

 . Откуда получается искомое соотношение для обратного z – преобразования:
. Откуда получается искомое соотношение для обратного z – преобразования: (30)
(30)
 ,
,
 ,
, ,
, , тогда как разностные модели оперируют с абсолютными значениями в тактовые моменты.
, тогда как разностные модели оперируют с абсолютными значениями в тактовые моменты. ,
, ,
,  .
. ,
, , определим прямое и обратное дискретные дельта-преобразования как функции аргумента
, определим прямое и обратное дискретные дельта-преобразования как функции аргумента  :
:
 ,
, .
. стремится к преобразованию Лапласа
стремится к преобразованию Лапласа  .
.