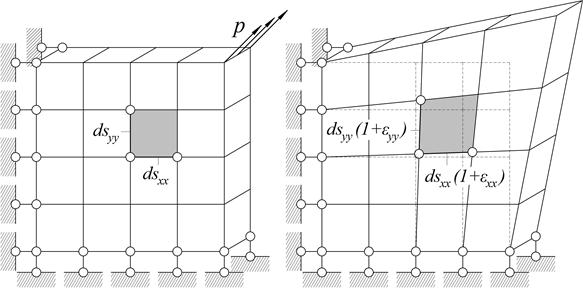
На основании ранее полученных выражений (3.19) по известным перемещениям могут быть определены соответствующие деформации. Для решения обратной задачи необходимо, чтобы деформации былисовместными (рис. 4.1) и удовлетворяли соответствующим условиям.
Рис. 4.1. Тело, разбитое на части сеткой ортогональных прямых, до деформации и после нее
Для случая малых деформаций продифференцируем первые два уравнения в ранее приведенной системе геометрических уравнений (3.19):
. (4.1)
В результате может быть получено выражение вида:
. (4.2)
Составим из трех последних выражений системы геометрических уравнений (3.19) следующее соотношение:
. (4.3)
Дифференцирование обеих частей выражения (4.3):
.(4.4)
Позволяет получить выражение вида:
. (4.5)
На основании установленных закономерностей (4.2) и (4.5) может быть получена система дифференциальных уравнений– система неразрывности деформаций:
. (4.6)
· Физические уравнения – уравнения, отражающие зависимость между напряжениями и деформациями элемента тела.
Для линейно-упругих изотропных тел физические уравнения могут быть представлены в виде системы линейных уравнений:
. (4.7)
Здесь μ – коэффициент Пуассона; E – модуль упругости при растяжении; G – модуль упругости при сдвиге:
. (4.8)
На основании формул (4.7) и (4.8) по известным напряжениям могут быть определены соответствующие деформации. Для решения обратной задачи может быть использована следующая система уравнений:
. (4.9)
Здесь λ – параметр Ляме:
. (4.10)
Все вышеприведенные соотношения (3.6), (3.9), (3.19), (4.6) были получены для случая трехмерного (объемного) напряженного состояния. В случае двухмерного (плоского) напряженного состояния статические и геометрические выражения могут быть преобразовать к виду:
, , (4.11)
, (4.12)
В процессе преобразования физических уравнения следует помнить, что здесь возможны две принципиально различные ситуации (рис. 4.2):
· Плоское напряженное состояние – характеризуется тем, что боковые грани элементарного параллелепипеда, выделенного в окрестности некоторой точки тела, свободны от напряжений: τyz = 0, τzx = 0. Напряжение и деформация лицевой грани:
, . (4.13)
, . (4.14)
Такое напряженное состояние испытывают лицевые грани очень тонкой пластины в случае одноосного растяжения. Перемещения по толщине пластины изменяются по линейному закону.
· Плоское деформированное состояние – характеризуется тем, что боковые грани элементарного параллелепипеда, выделенного в окрестности некоторой точки тела, свободны от напряжений: τyz = 0, τzx = 0. Напряжение и деформация лицевой грани:
, . (4.15)
, . (4.16)
Здесь η – параметр Ляме:
. (4.17)
Такое напряженное состояние испытывают центральные слои очень толстой пластины в случае одноосного растяжения.
Рис. 4.2. Плоское напряженное и плоское деформированное состояния
Для компактной записи полученных уравнений (3.6), (3.19), (4.6), (4.7) (4.9) механики сплошной среды (для случая трехмерного напряженного состояния) введем следующие обозначения:
o Векторы перемещений, напряжений и деформаций:
, , (4.18)
. (4.19)
o Матрицы дифференцирования:
, . (4.20)
Здесь ¶xx, ¶xx2, ¶xy2 – условные обозначения операторов дифференцирования:
; ; ; . (4.21)
o Матрицы упругих коэффициентов:
, (4.22)
. (4.23)
o Вектор интенсивности поверхностной и объемной нагрузки:
, . (4.24)
В результате:
или . (4.25)
Из полученных систем уравнений (4.25) видно, что они полностью замкнуты и число уравнений (3 + 6 + 6 = 15) совпадает с числом неизвестных (6 напряжений + 6 деформаций + 3 перемещения = 15 неизвестных).
Сформулируем для полученных систем уравнений условия на поверхности тела – граничные условия, выражающие равновесие между поверхностной нагрузкой и напряжениями в произвольной точке тела. Для этого в прямоугольной декартовой системе координат, в окрестности некоторой точки на поверхности тела, выделим элементарный тетраэдр с размерами dx, dy, dz (рис. 4.3). Ориентацию тетраэдра выберем такой, чтобы его боковые грани были параллельны координатным плоскостям, а основание – совпадало с касательной к поверхности тела в данной точке. Ориентацию основания определим нормалью υ, направляющие косинусы которой:
Рис. 4.3. Распределение напряжений на гранях элементарного тетраэдра
, , . (4.26)
Сумма проекций всех элементарных сил на ось Х равна:
. (4.27)
Замена переменных dAxx = dA·l, dAyy = dA·m, dAzz = dA·n приводит к тождеству:
. (4.28)
Сумма проекций всех элементарных сил, действующих на грани тетраэдра, на оси Х, Y и Z приводит к системе линейных уравнений:
. (4.29)
Или в компактной форме записи:
. (4.30)
Здесь матрица направляющих косинусов:
. (4.31)
На основании полученных систем уравнений (4.25) и граничных условий (4.30), может быть легко решена обратная задача теории упругости: по заданному перемещению точек тела {u} = f(x, y, z) могут быть найдены поля напряжений {σ} = f(x, y, z), деформаций {ε} = f(x, y, z), а также поверхностные {p} = f(x, y, z) и объемные нагрузки {F} = f(x, y, z) действующее на тело. Решение прямой задачи теории упругости: по заданным нагрузкам {p} = f(x, y, z) и {F} = f(x, y, z) найти поля {u} = f(x, y, z) {σ} = f(x, y, z) и {ε} = f(x, y, z) – гораздо более сложный процесс и для его реализации широко используют численные методы.
В целом поля {u}, {σ} и {ε} в объеме тела изменяются равномерно. Важнейшей задачей механики разрушения является оценка прочности нагруженной конструкции по известному распределению вышеупомянутых полей.

 . (4.1)
. (4.1) . (4.2)
. (4.2)
 . (4.3)
. (4.3) .(4.4)
.(4.4) . (4.5)
. (4.5) . (4.6)
. (4.6) . (4.7)
. (4.7) . (4.8)
. (4.8) . (4.9)
. (4.9) . (4.10)
. (4.10) ,
,  , (4.11)
, (4.11) , (4.12)
, (4.12) ,
,  . (4.13)
. (4.13) ,
,  . (4.14)
. (4.14) ,
,  . (4.15)
. (4.15) ,
,  . (4.16)
. (4.16) . (4.17)
. (4.17)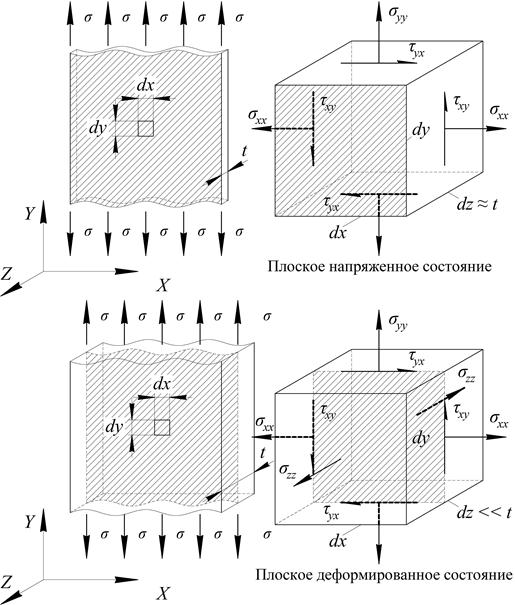
 ,
,  , (4.18)
, (4.18) . (4.19)
. (4.19) ,
,  . (4.20)
. (4.20) ;
;  ;
;  ;
;  . (4.21)
. (4.21) , (4.22)
, (4.22) . (4.23)
. (4.23) ,
,  . (4.24)
. (4.24) или
или  . (4.25)
. (4.25)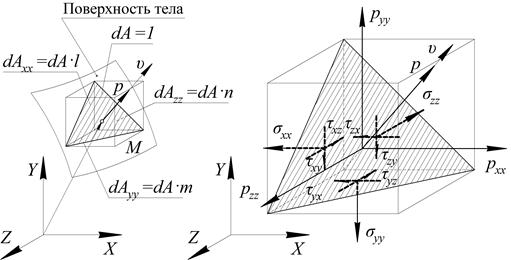
 ,
,  ,
,  . (4.26)
. (4.26) . (4.27)
. (4.27) . (4.28)
. (4.28) . (4.29)
. (4.29) . (4.30)
. (4.30) . (4.31)
. (4.31)