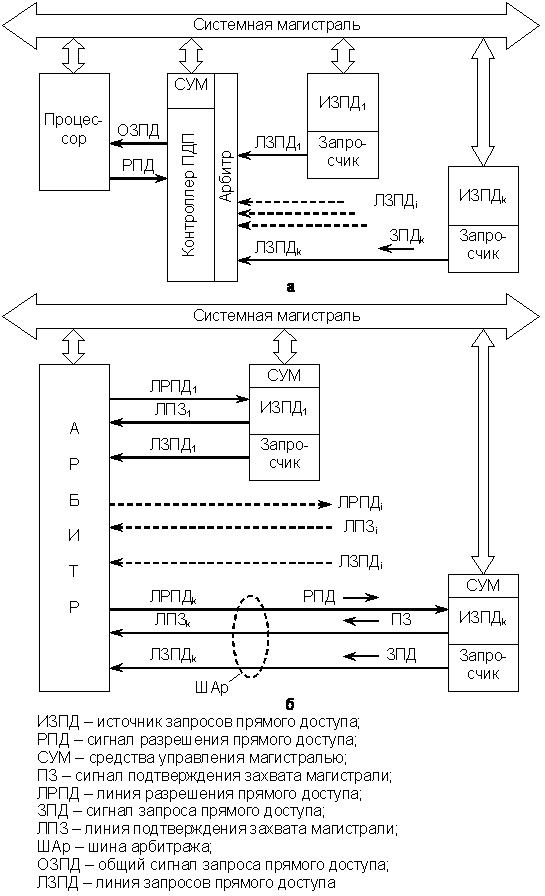
При обслуживании устройств, использующих slave DMA (рис. 20.1, а), всем обменом управляет контроллер ПДП, обязательными компонентами которого являются блок СУМ и арбитр магистрали. Устройства магистрали пассивны и должны содержать только запросчик.
При обслуживании устройств, использующих bus master DMA (рис. 20.1, б), контроллер ПДП, как таковой, отсутствует и централизованно выполняется только арбитраж магистрали. Устройства магистрали активны, поэтому их обязательными компонентами являются запросчик и блок СУМ (как уже отмечалось, "ЦП" в системах bus mastering рассматривается как одно из ИЗПД). После захвата магистраль управляется блоком СУМ конкретного устройства, ведущего обмен (master). В качестве арбитра магистрали используется либо специализированное устройство, либо контроллер ПДП, в котором функции блока СУМ отключены. Линии ЛРПД, присутствующие в системе bus master DMA, предназначены для передачи сигнала РПД, позволяющего активному устройству захватить магистраль. Кроме того, в системе bus master DMA обязательно присутствуют линии ЛПЗ, сигналы которых информируют арбитр о захвате магистрали тем или иным устройством. Сигнал ПЗ всегда выставляет master и удерживает его на линии все время, пока осуществляет обмен (управляет магистралью), поэтому сигнал всегда представлен потенциалом.
Рис.20.1. Радиальная структура системы: а – Slave DMA, б – Bus Master
В системах радиальной структуры контроллер ПДП может работать, как было отмечено выше, и в комбинированном режиме, т.е. поддерживать как систему slave DMA, так и систему bus master DMA. Запросы от ИЗПД в обеих системах DMA могут быть представлены как уровнем потенциала, так и его перепадом, поскольку поступают в контроллер или арбитр по отдельным линиям. Однако представление запроса потенциалом более предпочтительно, поскольку система DMA становится более устойчивой как к помехам, так и к сбоям аппаратуры. Это существенно снижает вероятность пропуска запроса от ИЗПД.
Основным преимуществом радиальной структуры является то, что упрощается аппаратура арбитра магистрали, поскольку каждый ИЗПД имеет собственную ЛЗПД. Кроме того, несколько упрощается аппаратура ИЗПД и конструкция слота даже в случае bus master DMA, поскольку все активные устройства магистрали имеют отдельную шину арбитража (ШАр). Все это удешевляет радиальную систему по сравнению с цепочечной, рассматриваемой ниже.
Цепочечная структура
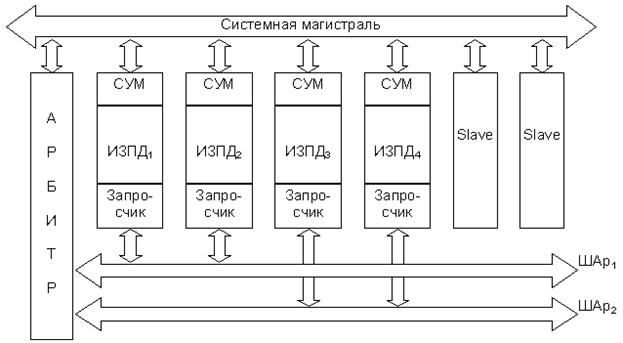
Упрощенный вариант обобщенной структуры системы ПДП цепочечного типа представлен на рис. 20.2.
Рис.20.2. Обобщённая цепочечная структура системы Bus Master DMA
Характерной особенностью цепочечной структуры является то, что множество активных устройств магистрали (ИЗПД), обязательными компонентами которых являются блок СУМ и запросчик, подключены к одной или нескольким шинам арбитража (ШАр). На рис. 20.2 присутствуют две ШАр. После захвата магистраль управляется блоком СУМ конкретного устройства, ведущего обмен (master). Контроллер ПДП отсутствует, и централизованно выполняется только арбитраж магистрали. На рис. 20.2 арбитр изображен как отдельное устройство магистрали, хотя, как отмечено выше, арбитраж может осуществлять и процессор (один из процессоров). Каждая ШАр соответствует одному входу в арбитр и обладает собственным уровнем приоритета. Таким образом, ИЗПД, подключенные к разным ШАр, обладают различным приоритетом. Пассивные устройства магистрали (slave) к ШАр не подключены. Кроме того, приоритет устройств, подключенных к одной ШАр, определяется также их положением в цепи распространения сигнала разрешения прямого доступа (РПД).
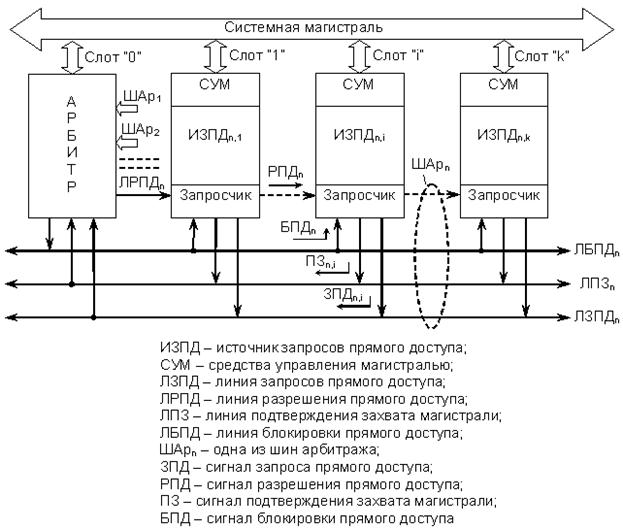
Рассмотрим этот момент более подробно на примере одной ШАрn системы bus master DMA, упрощенная структура которой приведена на
рис. 20.3.
Рис.20.3. Структура шины арбитража ”n” системы bus master DMA цепочечного типа
Из рисунка следует, что ШАр (для упрощения обозначений здесь и ниже индекс "n" опущен) в такой системе содержит, как минимум, четыре линии – ЛЗПД, ЛРПД, ЛПЗ и ЛБПД. В отличие от радиальной структуры, ИЗПД магистрали подключены к трем линиям ШАр (ЛЗПД, ЛПЗ и ЛБПД) параллельно, поэтому запросы от ИЗПД (сигналы ЗПД) всегда представлены уровнем потенциала. Выходные каскады аппаратных средств формирования запросов в каждом ИЗПД представляют собой ключи с открытым коллектором, объединенные по схеме монтажного "или". Это позволяет исключить потерю запросов, одновременно выставленных запросчиками разных ИЗПД на одну ЛЗПД.
Сигнал РПД распространяется последовательно через все устройства, пока его распространение не будет заблокировано запросчиком ИЗПДi, выставившим запрос прямого доступа (сигнал ЗПДi). Таким образом, приоритет ведущего устройства магистрали определяется его положением в цепи распространения сигнала РПД. Пусть арбитр расположен в слоте с номером "0". Тогда приоритет устройств, расположенных в последующих слотах, будет убывать с ростом номера слота. При отсутствии устройства в слоте необходимо принять меры для того, чтобы цепь распространения сигнала РПД не разрывалась. Это обеспечивается либо специальной конструкцией контактов слота, либо установкой перемычки на системной плате.
Сигнал линии ЛПЗ, как и в радиальной системе bus master DMA, информирует арбитр о захвате магистрали тем или иным устройством. Этот сигнал всегда выставляет master и удерживает его на линии все время, пока осуществляет обмен (управляет магистралью), поэтому сигнал всегда представлен потенциалом.
Линия ЛБПД – общая для всех ШАр и предназначена для передачи от арбитра сигнала блокировки прямого доступа (БПД), который запрещает bus mastering всем интеллектуальным устройствам магистрали. Необходимость в этом может возникнуть, например, при появлении запроса на линии ЛЗПД ШАр более высокого приоритета (при наличии нескольких ШАр) или в случае удержания магистрали одним устройством недопустимо долгое время.
Следует иметь в виду, что системы цепочечной структуры практически работают только в режиме bus master DMA, поскольку арбитр магистрали может идентифицировать только ЛЗПД, с которой поступил запрос, и определить его приоритет. При реализации режима slave DMA контроллеру DMA необходимо будет идентифицировать конкретное ИЗПД на данной линии. Такую операцию контроллер может выполнить только путем последовательного опроса устройств линии, что существенно увеличит время арбитража и усложнит аппаратуру устройств. Между тем техническая реализация таких систем возможна.
Основным преимуществом цепочечной структуры является практически неограниченное количество ИЗПД, подключаемых к одному входу арбитра (одной ШАр) без снижения быстродействия. Однако сложность и объем аппаратуры поддержки системы bus mastering в каждом ИЗПД увеличиваются, что ведет к увеличению стоимости системы.
20.3. Организация обмена в режиме ПДП
Использование любого варианта ПДП порождает ряд проблем, связанных с использованием общей магистрали несколькими устройствами. Даже при использовании простейшего варианта ПДП (slave DMA), который и рассматривается ниже, возникает проблема совместного использования магистрали двумя устройствами – процессором и контроллером ПДП. Для получения максимальной скорости обмена желательно, чтобы ПУ через контроллер ПДП имело непосредственную связь с ОП ЭВМ, т.е. имело бы специальную магистраль, как это и делается в ряде случаев. Однако такое решение существенно усложняет и удорожает ЭВМ, особенно при подключении нескольких ПУ, поэтому в большинстве простейших микро-ЭВМ для реализации обмена в режиме ПДП (организации каналов ПДП) используются шины системной магистрали. Именно этот вариант и рассматривается ниже. Кроме того, предполагается, что кэш-память отсутствует и данные (как и команды) поступают в процессор непосредственно из ОП. Последнее означает, что в течение всего периода обмена, т.е. пока магистралью управляет контроллер ПДП (master), процессор вынужден простаивать, поскольку не имеет доступа к ОП.
Несмотря на то что такой способ организации обмена в режиме ПДП характерен только для самых простейших микроЭВМ, на его примере можно достаточно наглядно проиллюстрировать основные принципы прямого управления магистралью со стороны ведущего устройства. Изучение механизма функционирования средств bas mastering более сложных вычислительных систем всегда требует достаточно детального рассмотрения сигналов конкретной системной магистрали, используемого процессора, особенностей архитектуры ведущих устройств и т.д.
Проблема совместного использования шин системного интерфейса процессором и контроллером ПДП в общем случае имеет два основных способа решения – ПДП с захватом цикла и ПДП с блокировкой процессора.
ПДП с захватом цикла
Этот способ ПДП предназначен для обмена короткими блоками информации в виде байта или слова и имеет два варианта.
Вариант 1. Для обмена используются те интервалы времени машинного цикла процессора, в которые он не обменивается данными с памятью или регистрами ПУ. В этом варианте контроллер ПДП никак не мешает работе процессора. Однако возникает необходимость выделения таких интервалов для исключения временного перекрытия обмена контроллера ПДП и процессора. В некоторых случаях процессоры формируют специальные сигналы, указывающие такты, в которых процессор не ведет операций обмена. В других случаях применяют специальные схемы, внешние по отношению к процессору, которые идентифицируют такие "свободные" интервалы времени.
Применение подобного варианта организации ПДП не снижает производительность процессора, но передача данных происходит только в случайные моменты времени. Это понижает общую скорость обмена. Кроме того, для некоторых ПУ, такой режим обмена вообще неприемлем.
Вариант 2. На время, необходимое для обмена одним байтом или словом данных (что составляет несколько тактов), процессор принудительно отключается от шин системной магистрали. Такой способ организации ПДП с захватом цикла является наиболее распространенным.
Когда ПУ готово к обмену, оно формирует сигнал ЗПД, который поступает в контроллер ПДП. Он, в свою очередь, вырабатывает аналогичный управляющий сигнал (ОЗПД), который поступает в процессор. Сигнал ОЗПД формируется контроллером при появлении сигнала (сигналов) ЗПД на любой линии (линиях) ЛЗПД и заставляет процессор на несколько тактов отключиться от системной магистрали. Получив этот сигнал, процессор заканчивает операции обмена на магистрали. Затем, не дожидаясь завершения текущей команды (или машинного цикла), выдает в контроллер ПДП сигнал РПД и отключается от шин системной магистрали. При этом внутренние операции в процессоре по завершению текущей команды (или машинного цикла) продолжаются и могут быть совмещены по времени с операциями ПДП.
С этого момента времени всеми шинами системной магистрали управляет контроллер ПДП. Используя системную магистраль, он осуществляет обмен между ПУ и ОП одним байтом или словом, а затем, сняв сигнал ОЗПД, возвращает управление системной магистралью процессору. Как только ПУ вновь будет готово к обмену, оно формирует сигнал ЗПД, контроллер ПДП захватывает магистраль, и цикл обмена повторяется. В промежутках между сигналами ЗПД процессор продолжает выполнять команды текущей программы.
Таким образом, в отличие от режима прерывания, который вводится только после завершения текущей команды, режим ПДП вводится, не дожидаясь ее завершения. Это связано с тем, что в режиме ПДП внутренние регистры процессора не используются, их содержимое не модифицируется, а следовательно, и не требует запоминания в стеке.
Естественно, что применение такого способа организации ПДП замедляет выполнение программы, но в меньшей степени, чем при обмене в режиме прерывания. Кроме того, в отличие от варианта 1 обмен происходит в те моменты времени, в которые это требует ПУ, что особенно важно при работе микроЭВМ в режиме реального времени.
Следует отметить, что такой вариант ПДП используется только тогда, когда интервалы времени между моментами готовности ПУ к обмену достаточно велики и позволяют выполнить процессору несколько операций.
ПДП с блокировкой процессора
Этот режим отличается от ПДП с "захватом цикла" тем, что управление системным интерфейсом передается контроллеру ПДП не на время обмена одним байтом или словом, а на все время обмена блоком данных. В этом случае все вопросы, связанные с синхронизацией работы ПУ и ОП, также решаются контроллером ПДП (в режиме "захвата цикла" их фактически решал процессор). Такой режим ПДП особенно необходим в тех случаях, когда процессор не успевает выполнить хотя бы одну команду между очередными операциями обмена в режиме ПДП.
Режим ПДП с блокировкой процессора в современных ЭВМ является основным, поскольку современные ПУ, такие как жесткие и оптические диски, видеосистемы, принтеры, сканеры и т.д., всегда ведут обмен блоками информации существенного объема. Однако для их передачи контроллер ПДП должен удерживать магистраль достаточно продолжительное время, в течение которого процессор будет простаивать. Это существенно понизит производительность рассматриваемой простейшей микроЭВМ в целом.
Между тем, как уже отмечалось, процессоры большинства современных ЭВМ работают с ОП через кэш-память. При наличии кэш-памяти достаточного объема (особенно многоуровневой) процессор может продолжать некоторое время обработку команд текущей программы – до тех пор, пока необходимая информация присутствует в кэш и не требует обновления. Это время достаточно ограничено, поэтому арбитр должен следить за тем, чтобы время удержания магистрали контроллером ПДП не превышало некоторой, наперед заданной величины и простои процессора были сведены к минимуму.
Следует отметить, что реальные контроллеры ПДП, как правило, могут работать в различных режимах организации ПДП, зачастую комбинированных, поэтому рассмотренная выше классификация способов организации ПДП является весьма условной (особенно ПДП с блокировкой процессора и вариант 2 ПДП с захватом цикла).
20.3.1. Инициализация средств ПДП
Любой способ организации обмена в режиме slave DMA предполагает инициализацию контроллера со стороны процессора. Для этого, как уже отмечалось, перед началом обмена с ПУ в режиме ПДП процессор должен загрузить в регистры контроллера для каждого канала ПДП начальные адреса выделенных областей памяти и их размер в байтах или в словах в зависимости от того, какими единицами информации ведется обмен, направление и режим передачи. Кроме того, если конкретный контроллер это позволяет, программа инициализации должна установить дисциплину обслуживания каналов ПДП (арбитража), а также запрограммировать внутренний таймер, контролирующий время удержания магистрали.
Все изложенное выше справедливо для простейшего варианта обмена – slave DMA, при котором всеми операциями обмена управляет контроллер ПДП. При использовании режима bus master DMA в системах как радиальной, так и цепочечной структуры контроллер ПДП отсутствует. Остается только арбитр магистрали, который также требует инициализации. В зависимости от "интеллектуальности" арбитра его инициализация осуществляется либо вручную с помощью переключателей (перемычек), либо программным путем. В последнем случае инициализация осуществляется либо из встроенного ПЗУ, либо одним из ведущих устройств магистрали при запуске вычислительной системы. Дисциплина арбитража в этом случае остается неизменной на все время функционирования вычислительной системы. Однако если предусмотрена возможность изменения дисциплины арбитража, повторная инициализация арбитра может выполняться в процессе обработки текущей программы процессором одного из ведущих устройств магистрали.
В общем случае СУМ интеллектуальных устройств магистрали, которые могут выступать как master, также требуют инициализации, т.е. загрузки адресов и режимов обмена, размеров передаваемых блоков информации и т.д. Однако во многих случаях master ведет обмен, руководствуясь только потребностями собственного программного обеспечения, записанного в локальное ПЗУ.
Рассмотрим упрощенные алгоритмы организации обмена (захвата магистрали) для обеих структур систем ПДП – радиальной и цепочечной.
20.3.2. Радиальная структура ( Slave DMA)
В соответствии с рис. 20.1,а все запросы от ИЗПД поступают в арбитр магистрали контроллера ПДП и в общем случае фиксируются там каким-либо образом. Последовательность операций по предоставлению магистрали в распоряжение контроллера ПДП при передаче блока данных в общем случае следующая:
1. Перед началом обмена происходит инициализация контроллера ПДП со стороны процессора. Эта процедура описана выше и здесь не конкретизируется.
2. Процессор продолжает выполнять команды текущей программы до поступления запроса от какого-либо ИЗПД.
3. При возникновении готовности какого-либо из инициализированных ПУ его запросчик вырабатывает сигнал ЗПД, поступающий по соответствующей ЛЗПД в арбитр контроллера ПДП.
4. При поступлении запроса от любого ИЗПД (т.е. сигнала ЗПД по любой ЛЗПД) арбитр контроллера ПДП формирует сигнал ОЗПД, который транслируется в процессор. При этом в контроллере инициализируется процедура поиска запроса с максимальным приоритетом, если одновременно поступило несколько запросов. Эта процедура выполняется обычно аппаратным способом, например с помощью дейзи-цепочек или логических схем.
5. Процессор заканчивает операции обмена на магистрали, посылает в контроллер сигнал РПД и отключается от шин системной магистрали. С этого момента шинами системной магистрали управляет контроллер ПДП (master). Кроме того, в контроллере запускается внутренний таймер, контролирующий время удержания магистрали.
6. Блок СУМ контроллера ПДП выставляет адрес обмена и управляющие сигналы, инициализирующие обмен. Результатом этой операции является обмен между ОП и наиболее приоритетным ПУ одним байтом или словом.
7. Блок СУМ контроллера ПДП производит модификацию адреса обмена и счетчика байт.
8. Блок СУМ контролирует размер переданного блока данных. Контроль может происходить как по количеству переданных байтов (слов), так и по конечному адресу области обмена.
9. Блок СУМ контролирует время удержания магистрали контроллером ПДП по внутреннему таймеру.
10. Дальнейшие действия зависят от результатов операций в п. 8 и 9, а именно:
· Если обмен не закончен и время удержания магистрали не истекло, то происходит повторение операций, начиная с п. 6.
· Если блок информации передан полностью (обмен закончен), то контроллер ПДП снимает сигнал ОЗПД и освобождает системную магистраль.
· Если время удержания магистрали истекло (хотя обмен и не закончен), то контроллер ПДП освобождает магистраль и снимает сигнал ОЗПД.
11. Процессор продолжает выполнение текущей программы, либо, если запрос уже поступил, начинается процесс обслуживания канала ПДП с меньшим приоритетом (см. операции, начиная с п. 4).
Возможна ситуация, при которой в процессе обслуживания одного из устройств магистрали в арбитр контроллера ПДП поступит запрос от устройства с большим приоритетом. В этом случае контроллер ПДП, не снимая сигнал ОЗПД, прекращает обслуживание устройства с меньшим приоритетом и переключается на обслуживание более приоритетного устройства.
20.3.3. Радиальная структура (Bus master DMA)
В соответствии с рис. 20.1,б все запросы от ИЗПД поступают в арбитр магистрали (контроллер ПДП отсутствует) и в общем случае фиксируются там каким-либо образом. Следует помнить, что в системе bus master DMA "ЦП" рассматривается как одно из ведущих устройств магистрали со своим приоритетом, т.е. как одно из ИЗПД. Последовательность операций по предоставлению магистрали в распоряжение одного из ведущих устройств (master) для передачи блока информации в общем случае следующая:
1. В начале функционирования вычислительной системы происходит инициализация арбитра и, если это необходимо, СУМ ведущих устройств магистрали. Эта процедура описана выше и здесь не конкретизируется.
2. Полагаем, что вычислительная система функционирует. Процессоры ведущих устройств выполняют команды соответствующих программ и периодически захватывают магистраль для реализации обмена M-S.
3. При возникновении готовности какого-либо из ведущих устройств магистрали его запросчик вырабатывает сигнал ЗПД, поступающий по соответствующей ЛЗПД в арбитр.
4. При поступлении запроса от любого ИЗПД (т.е. сигнала ЗПД по любой ЛЗПД) в арбитре магистрали происходит анализ сигналов линий ЛПЗ. Наличие сигнала на любой линии означает, что в текущий момент магистраль занята другим устройством, ведущим обмен. Одновременно выполняется процедура установления приоритета поступившего запроса (или запросов, если их поступило несколько). Пусть наиболее приоритетным оказался запрос от ИЗПДi.
5. Дальнейшие операции зависят от результата анализа линий ЛПЗ (сигналов ПЗ), а именно:
· При отсутствии сигналов ПЗ на линиях ЛПЗ (т.е. свободной магистрали) арбитр выставляет сигнал РПДi на линию ЛРПДi наиболее приоритетного устройства ИЗПДi.
· При наличии сигнала ПЗ на какой-либо из линий ЛПЗ (т.е. занятой магистрали) арбитр сравнивает приоритет устройства, занимающего магистраль, с приоритетом выделенного запроса (т.е. приоритетом ШАрi).
- Если приоритет поступившего запроса ниже, то арбитр ожидает окончание текущего обмена и снятия сигнала ПЗ. После этого арбитр выставляет сигнал РПДi на линию ЛРПДi наиболее приоритетного устройства ИЗПДi.
- Если приоритет поступившего запроса выше, то арбитр снимает сигнал РПД с линии ЛРПД устройства, ведущего обмен, т.е. запрещает ему bus mastering. Устройство прекращает операции обмена, освобождает магистраль и снимает сигнал ПЗ. Только после этого арбитр выставляет сигнал РПДi на линию ЛРПДi наиболее приоритетного устройства ИЗПДi.
6. Поступление сигнала РПД разрешает устройству bus mastering, т.е. захват магистрали. С этого момента шинами системной магистрали управляет блок СУМ выбранного устройства ИЗПДi (master), который выставляет также сигнал ПЗi. Кроме того, в арбитре или самом ИЗПДi запускается внутренний таймер, контролирующий время удержания магистрали.
7. Блок СУМ устройства ИЗПДi (master) выставляет адрес обмена и управляющие сигналы, инициализирующие обмен. Результатом этой операции является обмен M-S одним байтом или словом.
8. Блок СУМ активного устройства производит модификацию адреса и счетчика байтов.
9. Блок СУМ активного устройства контролирует размер переданного блока данных. Размер блока контролируется обычно по количеству переданных байтов (слов).
10. Контролируется время удержания магистрали устройством, ведущим обмен. Этот контроль может осуществляться как арбитром, так и самим устройством ИЗПДi по встроенному таймеру.
11. Дальнейшие действия зависят от результатов операций в п. 9 и 10, а именно:
· Если обмен не закончен и время удержания магистрали не истекло, то происходит повторение операций, начиная с п. 7.
· Если блок информации передан полностью (обмен закончен), то master освобождает системную магистраль и снимает сигнал ПЗi.
· Если время удержания магистрали истекло (хотя обмен и не закончен), то master освобождает магистраль либо сам, либо после снятия арбитром сигнала РПДi.
12. Начинается процедура захвата магистрали ведущим устройством с меньшим приоритетом (организация канала M-S), если запрос в арбитр уже поступил (см. операции, начиная с пункта 4).
Следует отметить, что в общем случае возможны системы bus master DMA радиальной структуры, в которых арбитр выступает как подчиненное устройство по отношению к ЦП. В этом случае перед предоставлением магистрали в распоряжение какого-либо ИЗПД арбитр запрашивает ЦП, монопольно использующий магистраль, т.е. как в случае slave DMA. Однако этот вариант DMA в настоящем разделе не рассматривается.
20.3.4. Цепочечная структура ( Bus master DMA)
В соответствии с рис. 20.2 к каждой ШАр (входу арбитра) может быть подключено множество запросчиков ИЗПД. Сигнал РПД распространяется по цепочке ИЗПД, подключенных к одной ЛЗПД (к одной ШАр). Распространение этого сигнала блокируется ИЗПД, выставившим запрос. Пусть это будет ИЗПДi, подключенный к ЩАрn (см. рис. 20.3). Получив сигнал РПД, блок СУМ ИЗПДn,i захватывает магистраль и начинает ею управлять. Таким образом, приоритет подключенных к одной ЛЗПД устройств определяется положением ИЗПД в цепочке распространения сигнала РПД. Это исключает необходимость выполнения процедуры поиска запроса с максимальным приоритетом среди ИЗПД, подключенных к одной ЛЗПД.
Если ШАр несколько, что обычно имеет место в реальных системах bus master DMA цепочечной структуры, в арбитре выполняется процедура поиска возбужденной ЛЗПД с максимальным приоритетом, которая аналогична процедуре поиска запроса с максимальным приоритетом в системе радиальной структуры.
На основании вышеизложенного можно записать обобщенную последовательность основных операций по предоставлению магистрали в распоряжение ведущего устройства (master) для передачи блока информации:
1. В начале функционирования вычислительной системы происходит инициализация арбитра и, если это необходимо, СУМ ведущих устройств магистрали. Эта процедура описана выше и здесь не конкретизируется.
2. Полагаем, что вычислительная система функционирует. Процессоры ведущих устройств выполняют команды соответствующих программ и периодически захватывают магистраль для реализации обмена M-S.
3. При возникновении готовности какого-либо из ведущих устройств магистрали его запросчик вырабатывает сигнал ЗПД, поступающий по соответствующей ЛЗПД в арбитр.
4. При поступлении запроса от любого ИЗПД (т.е. сигнала ЗПД по ЛЗПД любой ШАр) в арбитре магистрали происходит анализ сигналов линий ЛПЗ. Наличие сигнала на любой линии означает, что в текущий момент магистраль занята другим устройством, ведущим обмен. Одновременно выполняется процедура установления приоритета ШАр, с которой поступил запрос (или запросы, если их поступило несколько). Пусть наиболее приоритетным оказался запрос по ШАрn.
5. Дальнейшие операции зависят от результата анализа линий ЛПЗ (сигналов ПЗ), а именно:
· При отсутствии сигналов ПЗ на линиях ЛПЗ (т.е. свободной магистрали) арбитр выставляет сигнал РПДn на линию ЛРПДn наиболее приоритетной ШАр.
· При наличии сигнала ПЗ на какой-либо из линий ЛПЗ (т.е. занятой магистрали) арбитр сравнивает приоритет устройства, занимающего магистраль, с приоритетом выделенного запроса (т.е. приоритетом ШАрn):
- Если приоритет поступившего запроса ниже, то арбитр ожидает окончание текущего обмена и снятия сигнала ПЗ. После этого арбитр выставляет сигнал РПДn на линию ЛРПДn наиболее приоритетной ШАрn.
- Если приоритет поступившего запроса выше, то арбитр выставляет сигнал БПД на линии ЛБПД ШАр, т.е. запрещает активным устройствам магистрали bus mastering. Устройство прекращает операции обмена, освобождает магистраль и снимает сигнал ПЗ. Только после этого арбитр выставляет сигнал РПДn на линию ЛРПДn наиболее приоритетной ШАрn.
6. Поступление сигнала РПДn разрешает устройствам ШАрn bus mastering, т.е. захват магистрали. Распространение сигнала РПДn блокируется устройством ИЗПДn,i, выставившим запрос. С этого момента шинами системной магистрали управляет блок СУМ выбранного устройства ИЗПДn,i (master), который выставляет также сигнал ПЗn,i. Кроме того, в арбитре или самом ИЗПДn,i запускается внутренний таймер, контролирующий время удержания магистрали.
7. Блок СУМ активного устройства магистрали (master) выставляет адрес обмена и управляющие сигналы, инициализирующие обмен. Результатом этой операции является обмен M-S одним байтом или словом.
8. Блок СУМ активного устройства производит модификацию адреса и счетчика байт.
9. Блок СУМ активного устройства контролирует размер переданного блока данных. Размер блока контролируется обычно по количеству переданных байтов (слов).
10. Контролируется время удержания магистрали устройством, ведущим обмен. Этот контроль может осуществляться как арбитром, так и самим устройством ИЗПДn,i по встроенному таймеру.
11. Дальнейшие действия зависят от результатов операций в п. 9 и 10, а именно:
· Если обмен не закончен и время удержания магистрали не истекло, то происходит повторение операций, начиная с п. 7.
· Если блок информации передан полностью (обмен закончен), то master освобождает системную магистраль и снимает сигнал ПЗn,i.